梳理一下常见的图像几何变换及校正方式。参考资料来自《Computer Vision:Algorithms and Applications 》Richard Szeliski
图像几何变换
由于拍摄角度的不固定,图像出现几何变换,平移、旋转、尺度、仿射、投影等。如车牌检测的预处理,要将车牌校正,变成一个矩形。
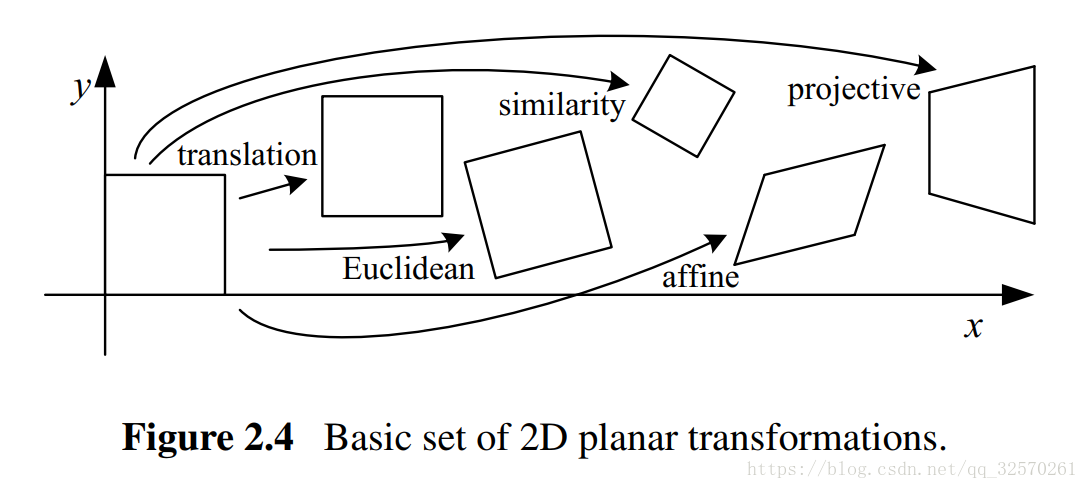
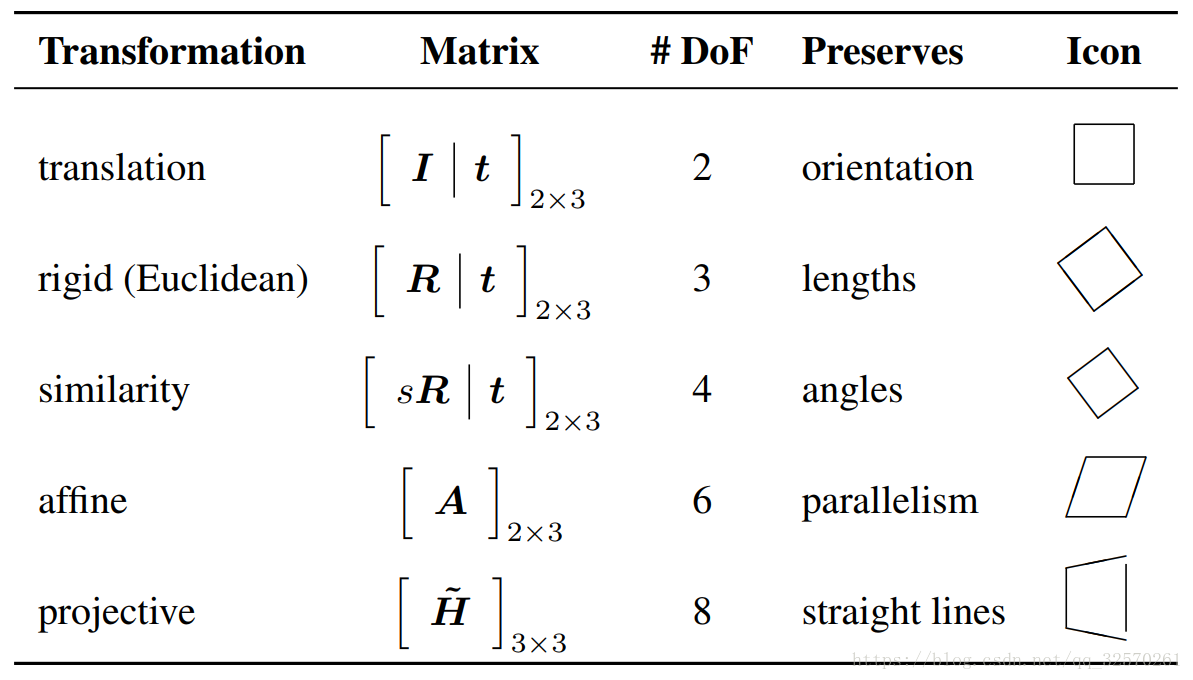
- translation
2D的平移,
x′=x+t
x¯′=[I0t1]x¯
rotation+translation
2D刚性运动,
x′=Rx+t
R=[ cosθsinθ−sinθcosθ]
正交旋转矩阵,欧式距离保持不变scaled rotation
“相似”变化,
x′=sRx+t
,
s
代表尺度因子
x′=[sRt]x¯=[ab−batxty]x¯
相似变换保持直线间的夹角不变 stretch/squash
改变图像的aspect ratio
x′=sxx+tx
y′=syy+ty
affine
仿射变换写作
x′=Ax¯
,
A
是一个
3×4
的矩阵
x′=⎡⎣⎢a00a10a20a01a11a21a02a12a22a03a13a23⎤⎦⎥x¯
平行线和平行平面在经过仿射变换之后仍然保持平行。
- projective
投影变换,3D透视变换
x~′=H~x~,
x′=h00x+h01y+h02h20x+h21y+h22
y′=h10x+h11y+h12h20x+h21y+h22
直线在经过投影变换之后还是直线
-
双线性内插
x′=a0+a1x+a2y+a6xy
y′=a3+a4x+a5y+a7xy
双线性内插一般用来resize图像
图像校正
存在明显特征的图像,可以提取特征点,然后配准求变换矩阵。注意选用的特征是否本身具备尺度、旋转不变性等。
如果只需要进行图像旋转校正,可以使用霍夫变换检测直线然后计算角度。我的理解,将坐标
(x,y)
转到参数空间
(ρ,θ)
,变成
(ρcosθ,ρsinθ)
,通过点
(x,y)
的直线就变成了正弦曲线。在参数空间中,找到
(ρ,θ)
的极值点,就对应一条直线。
得到直线的斜率之后,将图片旋转、“掰正”。这时候图像存在黑色背景,然后根据斜率的符号确定图像的旋转方向,进而得到图形的有效区域。
直线检测也可以通过拟合得到,基于最小二乘和RANSAC得到直线方程。