The Orocos ProjectSmarter control in robotics & automation! |
Search this site: |
HomeOrocos Projects
User loginUsername: * Password: * |
Supported by
News Feed
|
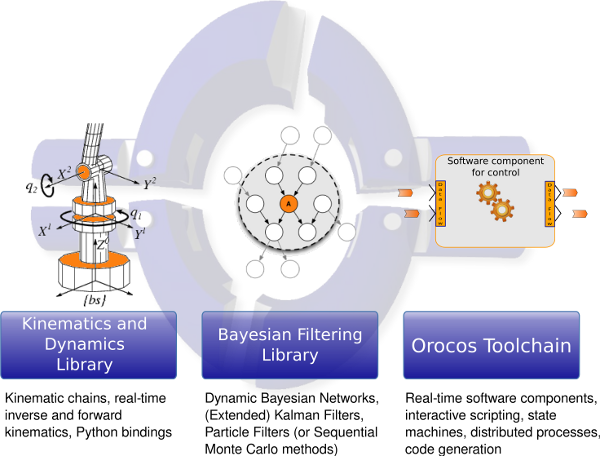
Open Robot Control SoftwareThis website is a home for portable C++ libraries for advanced machine and robot control.
BFL moved to github
As of yesterday, the BFL source code (and issue tracker) is enjoying its new home at github. Recently, support for the Eigen Matrix librarry has been added. Expect release 0.9.0 soon (indeed, we seem to have forgotten to post entries about 0.7 and 0.8 releases...) »
Installing the OROCOS Toolchain (2.8) from source on Mac OSX.
(Yet another) guide to cross compiling the Orocos Toolchain
Sagar Behere has written down a nice blog post on a new way of cross compiling the Orocos Toolchain. See his announcement below: Quote: For what it's worth, here is another howtohttp://techblog.sagar.se/blog/2013/05/16/yet-another-guide-to-cross-compiling-the-orocos-toolchain/ This method is quite painless, because there is no need to cross-compile the various supporting stuff like boost, libxml2, omniorb etc. Instead, we use xapt. The howto is attached in markdown format, if anyone wants to put it on the orocos wiki. Just my way of saying thanks for the good help I receive here :) /Sagar »
Orocos at ROSCON 2013, May 11-12
ROSCon is a developers’ conference, in the model of PyCon and BoostCon. Following the success of the inaugural ROSCon in St. Paul, Minnesota this year’s ROSCon will be held in Stuttgart, Germany, immediately following the ICRA conference. Sylvain Joyeux will give a talk about 'ROS and Rock: mixing Orocos components and ROS nodes into a model-driven toolchain' on the first day. Orocos users and developers visiting ICRA are invited to stay one or two days longer in order to attend this event and meet with each other. »
Orocos Toolchain 2.6.0 Released !
The Orocos Toolchain developers are content[1] to announce the 2.6 release cycle of the Orocos Toolchain. As in the previous release cycle, the emphasis is on stability, incremental development and stable API's. »Announcing the geometric relations semantics software
Dear orocos-user and orocos-developer, With this email I want to announce the "geometric-relations-semantics" The geometric relations semantics software (C++) implements the
Robotics Tech days at CEA LIST 15-16 March
The Robotics teams of the CEA LIST (France) are organizing some Tech days for our research partners. Since we are (heavily) using Orocos (mainly RTT, OCL) we thought that the Orocos community might be interested as well. »Orocos iTaSC & rFSM workshop at ERF@Odense
At the European Robotics Forum 2012 KU Leuven and Intermodalics are organizing a three-part seminar, appealing to both industry and research institutes, titled:
For all information, you can consult the Workshop page »
Telesurgery with reliable force feedback
Click below to read more about this movie.»
Orocos users meeting at IROS 2011.
Taking advantage that quite a few Orocos users and developers were attending IROS 2011 in San Francisco, USA, an informal meeting was organized to get to know each other and exchange our experiences and use cases. Among the attendants were people from the Katholieke Universiteit Leuven, that were showing live demos on robots like the PR2, the Kuka LWR, and the Kuka Youbot; NASA, that is currently using and evaluating Orocos in the context of the Robonaut 2 project; and PAL Robotics, that uses Orocos on their biped and wheeled robots REEM-B and REEM, respectively. Meeting developers from the mailing list in person is always great as it attaches a face to the email. Moreover, getting the opportunity to learn about the other's challenges and success stories is great for identifying future collaborations and moving the Orocos community forward. We hope to repeat this experience soon, and with more of us! »
|