本系列教程主要讲解Camera从APP层到HAL层的整个流程,第一篇先讲解CameraService的启动,后面会讲解open、preview、takepicture的流程。
Android 7.0之前CameraService是在mediaserver进程中注册的,看下Android 6.0的代码:
//path: frameworks\av\media\mediaserver\main_mediaserver.cpp
int main()
{
sp<ProcessState> proc(ProcessState::self());
sp<IServiceManager> sm = defaultServiceManager();
ALOGI("ServiceManager: %p", sm.get());
AudioFlinger::instantiate();
MediaPlayerService::instantiate();
ResourceManagerService::instantiate();
//初始化相机服务
CameraService::instantiate();
AudioPolicyService::instantiate();
SoundTriggerHwService::instantiate();
RadioService::instantiate();
registerExtensions();
ProcessState::self()->startThreadPool();
IPCThreadState::self()->joinThreadPool();
}接着看下Android 7.0中main_mediaserver.cpp的代码,发现没有了CameraService::instantiate(); 也就是说Android 7.0之后就不在main_mediaserver.cpp中注册了。
//没有CameraService::instantiate(),也少了几个别的服务,这里只关注CameraService
int main(int argc __unused, char **argv __unused)
{
signal(SIGPIPE, SIG_IGN);
sp<ProcessState> proc(ProcessState::self());
sp<IServiceManager> sm(defaultServiceManager());
ALOGI("ServiceManager: %p", sm.get());
InitializeIcuOrDie();
MediaPlayerService::instantiate();
ResourceManagerService::instantiate();
registerExtensions();
ProcessState::self()->startThreadPool();
IPCThreadState::self()->joinThreadPool();
}我们看下FrameWork层Camera的代码(frameworks\av\camera ),发现多了个cameraserver文件夹 ,看下里面的main_cameraserver.cpp,原来CameraServe::instantiaicte()在这里。
int main(int argc __unused, char** argv __unused)
{
signal(SIGPIPE, SIG_IGN);
sp<ProcessState> proc(ProcessState::self());
sp<IServiceManager> sm = defaultServiceManager();
ALOGI("ServiceManager: %p", sm.get());
//初始化CameraService服务
CameraServe::instantiaicte();
ProcessState::self()->startThreadPool();
IPCThreadState::self()->joinThreadPool();
}从这里可以猜测cameraserver应该是作为独立的进程运行的,我们看下 cameraserver文件夹下面的另一个文件cameraserver.rc
//这表示由init进程启动名字为cameraserver的进程,果然是独立进程,路径为/system/bin/cameraserver
service cameraserver /system/bin/cameraserver
//class表示类别,同一类别(这里是main类别)的进程同时启动,同时停止
class main
//用户名及分组
user cameraserver
group audio camera input drmrpc
ioprio rt 4
writepid /dev/cpuset/camera-daemon/tasks /dev/stune/top-app/taskscameraserver.rc由Android.mk文件来打包到指定位置:
LOCAL_PATH:= $(call my-dir)
include $(CLEAR_VARS)
//源文件
LOCAL_SRC_FILES:= \
main_cameraserver.cpp
LOCAL_SHARED_LIBRARIES := \
libcameraservice \
libcutils \
libutils \
libbinder \
libcamera_client
//模块的名称
LOCAL_MODULE:= cameraserver
LOCAL_32_BIT_ONLY := true
LOCAL_CFLAGS += -Wall -Wextra -Werror -Wno-unused-parameter
//LOCAL_INIT_RC会将cameraserver.rc放在/system/etc/init/目录中,这个目录下的脚本会由init进程来启动。
LOCAL_INIT_RC := cameraserver.rc
include $(BUILD_EXECUTABLE)那cameraserver.rc文件什么时候执行呢?这里我们需要理解下Android系统启动过程,Android系统启动包括两大块:Linux内核启动,Android框架启动。
1,Linux内核启动:
- BootLoader启动
内核启动首先装载BootLoader引导程序,执行完进入kthreadd内核进程,这是所有内核进程的父进程。
- 加载Linux内核
初始化驱动、安装根文件系统等,最后启动第一个用户进程init进程,它是所有用户进程的父进程。这样就进入了Android框架的启动阶段。
2,Android框架启动
init进程启动后会加载init.rc(system\core\rootdir\init.rc)脚本,当它执行mount_all指令挂载分区时,会加载/{system,vendor,odm}/etc/init目录下的所有rc脚本,这样就会启动cameraserver进程,同时也会启动zygote进程(第一个Java层进程,也是Java层所有进程的父进程)、ServiceManager、mediaserver(多媒体服务进程)、surfaceflinger(屏幕渲染相关的进程)等。之后zygote会孵化出启动system_server进程,Android framework里面的所有service(ActivityManagerService、WindowManagerService等)都是由system_server启动,这里就不细讲了。
那为什么Android 7.0之前cameraservice是运行在mediaserver进程中的,而从Android 7.0开始将cameraservice分离出来成一个单独的cameraserver进程?这是为了安全性,因为mediaserver 进程中有很多其它的Service,如AudioFlinger、MediaPlayerService等,如果这其中有一个Service挂掉就会导致mediaserver进程重启,如果相机正在执行,这样就会挂掉,用户体验很差。
现在知道了cameraserver进程是怎么启动的了,下面分析下它的启动过程,cameraserver进程的入口是frameworks\av\camera\cameraserver\main_cameraserver.cpp的main函数,看下代码:
int main(int argc __unused, char** argv __unused)
{
signal(SIGPIPE, SIG_IGN);
//获取一个ProcessState跟Binder驱动打交道
sp<ProcessState> proc(ProcessState::self());
//获取ServiceManager用以注册该服务
sp<IServiceManager> sm = defaultServiceManager();
ALOGI("ServiceManager: %p", sm.get());
CameraService::instantiate();
//线程池管理
ProcessState::self()->startThreadPool();
IPCThreadState::self()->joinThreadPool();
}我们主要关注CameraService::instantiate(),别的几行属于Binder机制,我这里假设你已经熟悉了,不熟悉的话先补下Binder知识,不然后面很难理解的。
CameraService继承了BinderService和BnCameraService类。CameraService::instantiate()函数是调用其父类BinderService类的方法。
class CameraService :
public BinderService<CameraService>,
public ::android::hardware::BnCameraService,
public IBinder::DeathRecipient,
public camera_module_callbacks_t
{
......
}
//模板类
template<typename SERVICE>
class BinderService
{
public:
static status_t publish(bool allowIsolated = false) {
sp<IServiceManager> sm(defaultServiceManager());
return sm->addService(
String16(SERVICE::getServiceName()),
new SERVICE(), allowIsolated);
}
static void publishAndJoinThreadPool(bool allowIsolated = false) {
publish(allowIsolated);
joinThreadPool();
}
static void instantiate() { publish(); }
......
}BinderService使用了模板类,使用CameraService::instantiate()初始化时,SERVICE就是CameraService。替换模板后CameraService::instantiate()函数如下:
static void instantiate() { publish(); }
static status_t publish() {
sp<IServiceManager> sm(defaultServiceManager());
/getServiceName()返回"media.camera"字符串
return sm->addService(
String16(CameraService ::getServiceName()), new CameraService (), false);
}我们知道defaultServiceManager返回的是BpServiceManager,看下它的addService函数:
virtual status_t addService(const String16& name, const sp<IBinder>& service,
bool allowIsolated)
{
Parcel data, reply;
//写入Interface name,这里是"android.os.IServiceManager"
data.writeInterfaceToken(IServiceManager::getInterfaceDescriptor());
//写入Service name
data.writeString16(name);
//写入Service实例
data.writeStrongBinder(service);
data.writeInt32(allowIsolated ? 1 : 0);
//remote()实际上是指BpBinder(0)
status_t err = remote()->transact(ADD_SERVICE_TRANSACTION, data, &reply);
return err == NO_ERROR ? reply.readExceptionCode() : err;
}注意addService第二个参数service是sp类型,而sp初始化时,会调用其包装的对象的onFirstRef()函数,不懂的可以参考Android系统的智能指针(轻量级指针、强指针和弱指针)的实现原理分析
这里的service就是CameraService,看下它的onFirstRef()函数:
//原始代码有点长,这里只保留了比较重要的代码
void CameraService::onFirstRef()
{
BnCameraService::onFirstRef();
//camera_module_t和CAMERA_HARDWARE_MODULE_ID定义在hardware\libhardware\include\hardware\camera_common.h中,
camera_module_t *rawModule;
//注意这里把rawModule强转成camera_module_t,至于为什么能强转,下面会讲的
int err = hw_get_module(CAMERA_HARDWARE_MODULE_ID,
(const hw_module_t **)&rawModule);
//创建CameraModule对象并初始化
mModule = new CameraModule(rawModule);
err = mModule->init();
//获取摄像头数量
mNumberOfCameras = mModule->getNumberOfCameras();
mNumberOfNormalCameras = mNumberOfCameras;
int latestStrangeCameraId = INT_MAX;
for (int i = 0; i < mNumberOfCameras; i++) {
String8 cameraId = String8::format("%d", i);
//获取每个camera的信息以及初始化状态
}
//因为CameraService继承了camera_module_callbacks_t,定义在camera_common.h中,所以这里的Callback主要监听camera_device_status_change和torch_mode_status_change
if (mModule->getModuleApiVersion() >= CAMERA_MODULE_API_VERSION_2_1) {
mModule->setCallbacks(this);
}
//连接CameraServiceProxy服务,也就是"media.camera.proxy"服务,此服务由SystemServer注册到ServiceManager中
CameraService::pingCameraServiceProxy();
}camera_module_t(hardware\libhardware\include\hardware\camera_common.h)的声明如下:
typedef struct camera_module {
//注意common必须是camera_module的第一个成员,这样就可以根据camera_module_t的地址强转成hw_module_t
hw_module_t common;
int (*get_number_of_cameras)(void);
......
} camera_module_t;hw_get_module()函数定义在hardware\libhardware\hardware.c文件中
int hw_get_module(const char *id, const struct hw_module_t **module)
{
return hw_get_module_by_class(id, NULL, module);
}
int hw_get_module_by_class(const char *class_id, const char *inst,
const struct hw_module_t **module)
{
......
//首先根据ro.hardware.class_id.inst查找动态链接库路径,如果可以找到,直接跳到found位置
snprintf(prop_name, sizeof(prop_name), "ro.hardware.%s", name);
if (property_get(prop_name, prop, NULL) > 0) {
if (hw_module_exists(path, sizeof(path), name, prop) == 0) {
goto found;
}
}
//在所有的配置变量中查找所需模块的动态链接库路径
for (i=0 ; i<HAL_VARIANT_KEYS_COUNT; i++) {
if (property_get(variant_keys[i], prop, NULL) == 0) {
continue;
}
if (hw_module_exists(path, sizeof(path), name, prop) == 0) {
goto found;
}
}
return -ENOENT;
found:
//根据路径加载动态链接库,并将硬件模块的结构体地址赋给module
return load(class_id, path, module);
}static int load(const char *id,
const char *path,
const struct hw_module_t **pHmi)
{
int status = -EINVAL;
void *handle = NULL;
struct hw_module_t *hmi = NULL;
//打开.so文件
handle = dlopen(path, RTLD_NOW);
//获取hal_module_info结构体的地址
const char *sym = HAL_MODULE_INFO_SYM_AS_STR;
hmi = (struct hw_module_t *)dlsym(handle, sym);
}
//hardware.h
/**
* Name of the hal_module_info
*/
#define HAL_MODULE_INFO_SYM HMI
/**
* Name of the hal_module_info as a string
*/
#define HAL_MODULE_INFO_SYM_AS_STR "HMI"根据上述代码,dlsym就是找HMI的地址,而HMI就是HAL_MODULE_INFO_SYM的宏定义,所以最终就是找HAL_MODULE_INFO_SYM的地址。
通过查找Android 7.0 代码,发现HAL_MODULE_INFO_SYM是在hardware/qcom/camera/QCamera2/QCamera2Hal.cpp文件中实现的(如果你的7.0源码没有HAL层的代码,可以参考在线源代码http://androidxref.com/)。
static hw_module_t camera_common = {
.tag = HARDWARE_MODULE_TAG,
.module_api_version = CAMERA_MODULE_API_VERSION_2_4,
.hal_api_version = HARDWARE_HAL_API_VERSION,
.id = CAMERA_HARDWARE_MODULE_ID,
.name = "QCamera Module",
.author = "Qualcomm Innovation Center Inc",
.methods = &qcamera::QCamera2Factory::mModuleMethods,
.dso = NULL,
.reserved = {0}
};
camera_module_t HAL_MODULE_INFO_SYM = {
.common = camera_common,
.get_number_of_cameras = qcamera::QCamera2Factory::get_number_of_cameras,
.get_camera_info = qcamera::QCamera2Factory::get_camera_info,
.set_callbacks = qcamera::QCamera2Factory::set_callbacks,
.get_vendor_tag_ops = qcamera::QCamera3VendorTags::get_vendor_tag_ops,
.open_legacy = qcamera::QCamera2Factory::open_legacy,
.set_torch_mode = qcamera::QCamera2Factory::set_torch_mode,
.init = NULL,
.reserved = {0}
};所以最终rawModule就是指向HAL_MODULE_INFO_SYM,这样CameraService就跟Camera HAL层联系起来了。
回到CameraService::onFirstRef()函数中:
//创建CameraModule对象并初始化
mModule = new CameraModule(rawModule);
err = mModule->init();
//获取摄像头数量
mNumberOfCameras = mModule->getNumberOfCameras();
mNumberOfNormalCameras = mNumberOfCameras;CameraModule::CameraModule(camera_module_t *module) {
//对mModule进行初始化
mModule = module;
}
int CameraModule::init() {
//mModule->init就是指向HAL_MODULE_INFO_SYM的init,为NULL
if (getModuleApiVersion() >= CAMERA_MODULE_API_VERSION_2_4 &&
mModule->init != NULL) {
ATRACE_BEGIN("camera_module->init");
res = mModule->init();
ATRACE_END();
}
//调用getNumberOfCameras()
mCameraInfoMap.setCapacity(getNumberOfCameras());
}
int CameraModule::getNumberOfCameras() {
int numCameras;
//调用HAL_MODULE_INFO_SYM的get_number_of_cameras()函数
numCameras = mModule->get_number_of_cameras();
return numCameras;
}
//查看HAL层代码
int QCamera2Factory::get_number_of_cameras()
{
int numCameras = 0;
//gQCamera2Factory为空的话,创建一个对象
if (!gQCamera2Factory) {
gQCamera2Factory = new QCamera2Factory();
if (!gQCamera2Factory) {
LOGE("Failed to allocate Camera2Factory object");
return 0;
}
}
if(gQCameraMuxer)
numCameras = gQCameraMuxer->get_number_of_cameras();
else
//获取Camera摄像头数量
numCameras = gQCamera2Factory->getNumberOfCameras();
return numCameras;
}
QCamera2Factory::QCamera2Factory()
{
mHalDescriptors = NULL;
mCallbacks = NULL;
//get_num_of_cameras()在mm_camera_interface.c中,之后就会进入到Linux内核,往下就不讲了
mNumOfCameras = get_num_of_cameras();
mNumOfCameras_expose = get_num_of_cameras_to_expose();
......
}onFirstRef函数主要是根据ID查找并加载HAL模块的动态链接库,然后创建CameraModule对象并初始化以及获取摄像头数量,之后给HAL层设置一个监听接口。
回到addService函数中,接着看其里面的具体内容:
virtual status_t addService(const String16& name, const sp<IBinder>& service,
bool allowIsolated)
{
Parcel data, reply;
//写入Interface name,这里是"android.os.IServiceManager"
data.writeInterfaceToken(IServiceManager::getInterfaceDescriptor());
//写入Service name
data.writeString16(name);
//写入Service实例
data.writeStrongBinder(service);
data.writeInt32(allowIsolated ? 1 : 0);
//remote()实际上是指BpBinder(0),它是指Binder驱动中的0号引用,也就是指ServiceManager的代理对象
status_t err = remote()->transact(ADD_SERVICE_TRANSACTION, data, &reply);
return err == NO_ERROR ? reply.readExceptionCode() : err;
}
status_t BpBinder::transact(
uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags)
{
// Once a binder has died, it will never come back to life.
if (mAlive) {
//通过IPCThreadState对象来向Binder驱动发送添加服务的请求,注意mHandle值为0
status_t status = IPCThreadState::self()->transact(
mHandle, code, data, reply, flags);
if (status == DEAD_OBJECT) mAlive = 0;
return status;
}
return DEAD_OBJECT;
}
status_t IPCThreadState::transact(int32_t handle,
uint32_t code, const Parcel& data,
Parcel* reply, uint32_t flags)
{
status_t err = data.errorCheck();
if (err == NO_ERROR) {
//将数据封装成binder_transaction_data结构,并写到mOut变量中
err = writeTransactionData(BC_TRANSACTION, flags, handle, code, data, NULL);
}
if ((flags & TF_ONE_WAY) == 0) {
if (reply) {
err = waitForResponse(reply);
} else {
Parcel fakeReply;
err = waitForResponse(&fakeReply);
}
}
return err;
}
status_t IPCThreadState::writeTransactionData(int32_t cmd, uint32_t binderFlags,
int32_t handle, uint32_t code, const Parcel& data, status_t* statusBuffer)
{
binder_transaction_data tr;
//封装数据
tr.target.ptr = 0; /* Don't pass uninitialized stack data to a remote process */
tr.target.handle = handle;
tr.code = code;
tr.flags = binderFlags;
tr.cookie = 0;
tr.sender_pid = 0;
tr.sender_euid = 0;
const status_t err = data.errorCheck();
if (err == NO_ERROR) {
tr.data_size = data.ipcDataSize();
tr.data.ptr.buffer = data.ipcData();
tr.offsets_size = data.ipcObjectsCount()*sizeof(binder_size_t);
tr.data.ptr.offsets = data.ipcObjects();
}
......
//写到mOut变量中
mOut.writeInt32(cmd);
mOut.write(&tr, sizeof(tr));
return NO_ERROR;
}到这里只是将数据封装了一下,但是还没发送,接着看waitForResponse函数:
status_t IPCThreadState::waitForResponse(Parcel *reply, status_t *acquireResult)
{
uint32_t cmd;
int32_t err;
while (1) {
//跟Binder驱动交互,这个是核心,在下面讲解
if ((err=talkWithDriver()) < NO_ERROR) break;
//读取Binder驱动返回的命令
cmd = (uint32_t)mIn.readInt32();
IF_LOG_COMMANDS() {
alog << "Processing waitForResponse Command: "
<< getReturnString(cmd) << endl;
}
switch (cmd) {
case BR_TRANSACTION_COMPLETE:
if (!reply && !acquireResult) goto finish;
break;
case BR_DEAD_REPLY:
err = DEAD_OBJECT;
goto finish;
case BR_FAILED_REPLY:
err = FAILED_TRANSACTION;
goto finish;
case BR_ACQUIRE_RESULT:
{
ALOG_ASSERT(acquireResult != NULL, "Unexpected brACQUIRE_RESULT");
const int32_t result = mIn.readInt32();
if (!acquireResult) continue;
*acquireResult = result ? NO_ERROR : INVALID_OPERATION;
}
goto finish;
case BR_REPLY:
{
binder_transaction_data tr;
err = mIn.read(&tr, sizeof(tr));
ALOG_ASSERT(err == NO_ERROR, "Not enough command data for brREPLY");
if (err != NO_ERROR) goto finish;
if (reply) {
if ((tr.flags & TF_STATUS_CODE) == 0) {
reply->ipcSetDataReference(
reinterpret_cast<const uint8_t*>(tr.data.ptr.buffer),
tr.data_size,
reinterpret_cast<const binder_size_t*>(tr.data.ptr.offsets),
tr.offsets_size/sizeof(binder_size_t),
freeBuffer, this);
} else {
err = *reinterpret_cast<const status_t*>(tr.data.ptr.buffer);
freeBuffer(NULL,
reinterpret_cast<const uint8_t*>(tr.data.ptr.buffer),
tr.data_size,
reinterpret_cast<const binder_size_t*>(tr.data.ptr.offsets),
tr.offsets_size/sizeof(binder_size_t), this);
}
} else {
freeBuffer(NULL,
reinterpret_cast<const uint8_t*>(tr.data.ptr.buffer),
tr.data_size,
reinterpret_cast<const binder_size_t*>(tr.data.ptr.offsets),
tr.offsets_size/sizeof(binder_size_t), this);
continue;
}
}
goto finish;
default:
err = executeCommand(cmd);
if (err != NO_ERROR) goto finish;
break;
}
}
finish:
if (err != NO_ERROR) {
if (acquireResult) *acquireResult = err;
if (reply) reply->setError(err);
mLastError = err;
}
return err;
}
//不穿参数时doReceive为true
status_t IPCThreadState::talkWithDriver(bool doReceive)
{
//mProcess是IPCThreadState初始化时所包含的ProcessState对象,它的mDriverFD对应Binder驱动的文件描述符
if (mProcess->mDriverFD <= 0) {
return -EBADF;
}
//将mOut的数据封装到binder_write_read结构体中
binder_write_read bwr;
// Is the read buffer empty?
const bool needRead = mIn.dataPosition() >= mIn.dataSize();
// We don't want to write anything if we are still reading
// from data left in the input buffer and the caller
// has requested to read the next data.
const size_t outAvail = (!doReceive || needRead) ? mOut.dataSize() : 0;
bwr.write_size = outAvail;
bwr.write_buffer = (uintptr_t)mOut.data();
// This is what we'll read.
if (doReceive && needRead) {
bwr.read_size = mIn.dataCapacity();
bwr.read_buffer = (uintptr_t)mIn.data();
} else {
bwr.read_size = 0;
bwr.read_buffer = 0;
}
bwr.write_consumed = 0;
bwr.read_consumed = 0;
status_t err;
do {
#if defined(__ANDROID__)
//这里就是向Binder驱动写入命令和数据
if (ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr) >= 0)
err = NO_ERROR;
#else
err = INVALID_OPERATION;
#endif
} while (err == -EINTR);
......
return err;
}下面就进入到了Linux内核中了,AOSP中没有这部分代码,我们可以使用这两个Linux内核在线阅读网站:https://lxr.missinglinkelectronics.com/linux 或者 http://elixir.free-electrons.com/
//路径
linux/drivers/android/binder.c
linux/include/uapi/linux/android/binder.h首先binder_init函数会创建 /dev/binder节点:
static int __init binder_init(void)
{
......
while ((device_name = strsep(&device_names, ","))) {
//初始化Binder设备
ret = init_binder_device(device_name);
}
return ret;
}
static int __init init_binder_device(const char *name)
{
int ret;
struct binder_device *binder_device;
binder_device = kzalloc(sizeof(*binder_device), GFP_KERNEL);
if (!binder_device)
return -ENOMEM;
//操作函数结构体
binder_device->miscdev.fops = &binder_fops;
binder_device->miscdev.minor = MISC_DYNAMIC_MINOR;
//设备名称,这里就是"binder",这样用户空间可以通过/dev/binder节点进行操作
binder_device->miscdev.name = name;
binder_device->context.binder_context_mgr_uid = INVALID_UID;
binder_device->context.name = name;
//向内核中注册misc设备
ret = misc_register(&binder_device->miscdev);
if (ret < 0) {
kfree(binder_device);
return ret;
}
hlist_add_head(&binder_device->hlist, &binder_devices);
return ret;
}
//这里指定了文件操作的函数
static const struct file_operations binder_fops = {
.owner = THIS_MODULE,
.poll = binder_poll,
//从Linux kernel 2.6.36版本开始,删除了ioctl函数指针,用unlocked_ioctl取代
.unlocked_ioctl = binder_ioctl,
.compat_ioctl = binder_ioctl,
.mmap = binder_mmap,
.open = binder_open,
.flush = binder_flush,
.release = binder_release,
};回到IPCThreadState::talkWithDriver:
if (ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr) >= 0)
err = NO_ERROR;
//ioctl就对应内核中的binder_ioctl函数,
static long binder_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
int ret;
struct binder_proc *proc = filp->private_data;
struct binder_thread *thread;
......
//从binder_proc中查找binder_thread,如果当前线程已经加入到proc的线程队列则直接返回,如果不存在则创建binder_thread,并将当前线程添加到当前的proc
thread = binder_get_thread(proc);
switch (cmd) {
case BINDER_WRITE_READ:
ret = binder_ioctl_write_read(filp, cmd, arg, thread);
if (ret)
goto err;
break;
}
static int binder_ioctl_write_read(struct file *filp,
unsigned int cmd, unsigned long arg,
struct binder_thread *thread)
{
int ret = 0;
struct binder_proc *proc = filp->private_data;
unsigned int size = _IOC_SIZE(cmd);
void __user *ubuf = (void __user *)arg;
struct binder_write_read bwr;
if (size != sizeof(struct binder_write_read)) {
ret = -EINVAL;
goto out;
}
//把用户空间的binder_write_read数据拷贝到内核空间bwr
if (copy_from_user(&bwr, ubuf, sizeof(bwr))) {
ret = -EFAULT;
goto out;
}
if (bwr.write_size > 0) {
//当写缓存中有数据时,执行Binder写操作
ret = binder_thread_write(proc, thread,
bwr.write_buffer,
bwr.write_size,
&bwr.write_consumed);
trace_binder_write_done(ret);
//如果Binder写操作失败,则将bwr数据拷回到内核空间,并返回
if (ret < 0) {
bwr.read_consumed = 0;
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
ret = -EFAULT;
goto out;
}
}
if (bwr.read_size > 0) {
//当读缓存中有数据时,执行Binder读操作
ret = binder_thread_read(proc, thread, bwr.read_buffer,
bwr.read_size,
&bwr.read_consumed,
filp->f_flags & O_NONBLOCK);
trace_binder_read_done(ret);
if (!list_empty(&proc->todo))
wake_up_interruptible(&proc->wait);
//如果Binder读操作失败,则将bwr数据拷回到内核空间,并返回
if (ret < 0) {
if (copy_to_user(ubuf, &bwr, sizeof(bwr)))
ret = -EFAULT;
goto out;
}
}
//将bwr数据拷回到内核空间,并返回
if (copy_to_user(ubuf, &bwr, sizeof(bwr))) {
ret = -EFAULT;
goto out;
}
out:
return ret;
}看下binder_thread_write写操作:
static int binder_thread_write(struct binder_proc *proc,
struct binder_thread *thread,
binder_uintptr_t binder_buffer, size_t size,
binder_size_t *consumed)
{
uint32_t cmd;
struct binder_context *context = proc->context;
void __user *buffer = (void __user *)(uintptr_t)binder_buffer;
void __user *ptr = buffer + *consumed;
void __user *end = buffer + size;
while (ptr < end && thread->return_error == BR_OK) {
if (get_user(cmd, (uint32_t __user *)ptr))
return -EFAULT;
ptr += sizeof(uint32_t);
trace_binder_command(cmd);
if (_IOC_NR(cmd) < ARRAY_SIZE(binder_stats.bc)) {
binder_stats.bc[_IOC_NR(cmd)]++;
proc->stats.bc[_IOC_NR(cmd)]++;
thread->stats.bc[_IOC_NR(cmd)]++;
}
switch (cmd) {
......
//我们前面发送的命令就是BC_TRANSACTION
case BC_TRANSACTION:
case BC_REPLY: {
struct binder_transaction_data tr;
//拷贝用户空间数据到内核空间tr
if (copy_from_user(&tr, ptr, sizeof(tr)))
return -EFAULT;
ptr += sizeof(tr);
binder_transaction(proc, thread, &tr,
cmd == BC_REPLY, 0);
break;
}
}
return 0;
}
static void binder_transaction(struct binder_proc *proc,
struct binder_thread *thread,
struct binder_transaction_data *tr, int reply,
binder_size_t extra_buffers_size)
{
......
if (reply) {
......
} else {
//因为我们传的tr->target.handle为0,也就是ServiceManager进程
if (tr->target.handle) {
......
} else {
//直接获取ServiceManager的在Binder驱动中的binder_node目标节点
target_node = context->binder_context_mgr_node;
}
//获取ServiceManager的进程
target_proc = target_node->proc;
}
......
if (target_thread) {
e->to_thread = target_thread->pid;
//获取ServiceManager的TODO队列和等待队列
target_list = &target_thread->todo;
target_wait = &target_thread->wait;
}
//分配两个结构体内存
t = kzalloc(sizeof(*t), GFP_KERNEL);
binder_stats_created(BINDER_STAT_TRANSACTION);
tcomplete = kzalloc(sizeof(*tcomplete), GFP_KERNEL);
binder_stats_created(BINDER_STAT_TRANSACTION_COMPLETE);
......
//为target_proc分配一块Buffer
t->buffer = binder_alloc_buf(target_proc, tr->data_size,
tr->offsets_size, extra_buffers_size,
!reply && (t->flags & TF_ONE_WAY));
......
//向target_list,也就是ServiceManager的TODO队列,添加BINDER_WORK_TRANSACTION事务
t->work.type = BINDER_WORK_TRANSACTION;
list_add_tail(&t->work.entry, target_list);
//向当前线程的TODO队列添加BINDER_WORK_TRANSACTION_COMPLETE事务
tcomplete->type = BINDER_WORK_TRANSACTION_COMPLETE;
list_add_tail(&tcomplete->entry, &thread->todo);
//如果ServiceManager进程正在等待,则唤醒
if (target_wait) {
if (reply || !(t->flags & TF_ONE_WAY))
wake_up_interruptible_sync(target_wait);
else
wake_up_interruptible(target_wait);
}
return;
} 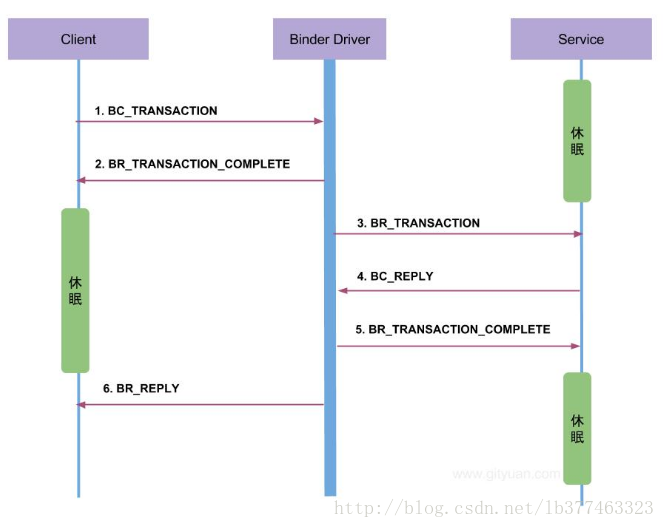
对比这张Binder架构图,Client就是cameraserver进程,Service就是servicemanager进程,整个注册服务的过程就是cameraserver进程发送BC_TRANSACTION命令到Binder驱动中,然后Binder驱动发送BR_TRANSACTION命令到servermanager进程中注册,这里会生成一个handle,用来标识”media.camera”服务,然后将此服务添加到svclist全局链表中。然后通过BC_REPLY命令将返回结果发送到Binder驱动中,Binder驱动再通过BR_REPLY命令将结果发送给cameraserver进程。
至此,CameraService的servicename和实例就在ServiceManager中注册了,之后别的进程即可通过ServiceManager跨进程获取CameraService服务。并且CameraService通过onFirstRef()函数跟Camera HAL层联系起来了。
作者:lb377463323
出处:http://blog.csdn.net/lb377463323
原文链接:http://blog.csdn.net/lb377463323/article/details/78796915
转载请注明出处!