#include "tim_driver.h"
//tim2³õʼ»¯:1ÃëÖÓ¸üÐÂÊý¾Ý
void tim2_init(void)
{
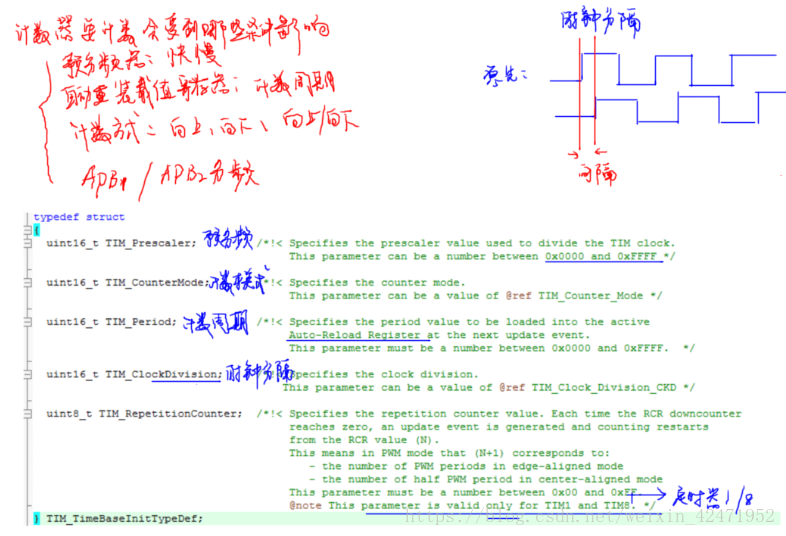
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
//ʹÄÜʱÖÓ
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStruct.TIM_Period = 9999;
TIM_TimeBaseInitStruct.TIM_Prescaler = 7199;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStruct);
//ʹÄÜUPDATAµÄÖжÏÅäÖÃλ
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);
//¶¨Ê±Æ÷ʹÄÜ
TIM_Cmd(TIM2,ENABLE);
}
//tim2Öжϳõʼ»¯
void tim2_NVIC_init(void)
{
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_InitStruct.NVIC_IRQChannel = TIM2_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 3;
NVIC_Init(&NVIC_InitStruct);
}
void TIM2_IRQHandler(void)
{
if(TIM_GetITStatus(TIM2, TIM_IT_Update) == SET)
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
uart1_putc('A');
}
}