本文是一篇学习笔记,重在记录。
进入正题:
1、下载源代码
$ git clone -b base https://github.com/richardw05/mybot_ws.git
:~$ cd mybot_ws
:~/mybot_ws$ ls
README.md run_cmd.sh run_gazebo.sh run_rviz.sh src
2、编译
:~/mybot_ws$ catkin build
3、设置路径
:~/mybot_ws$ echo “source ~/mybot_ws/devel/setup.bash” >> ~/.bashrc
:~/mybot_ws$ source ~/.bashrc
4、运行
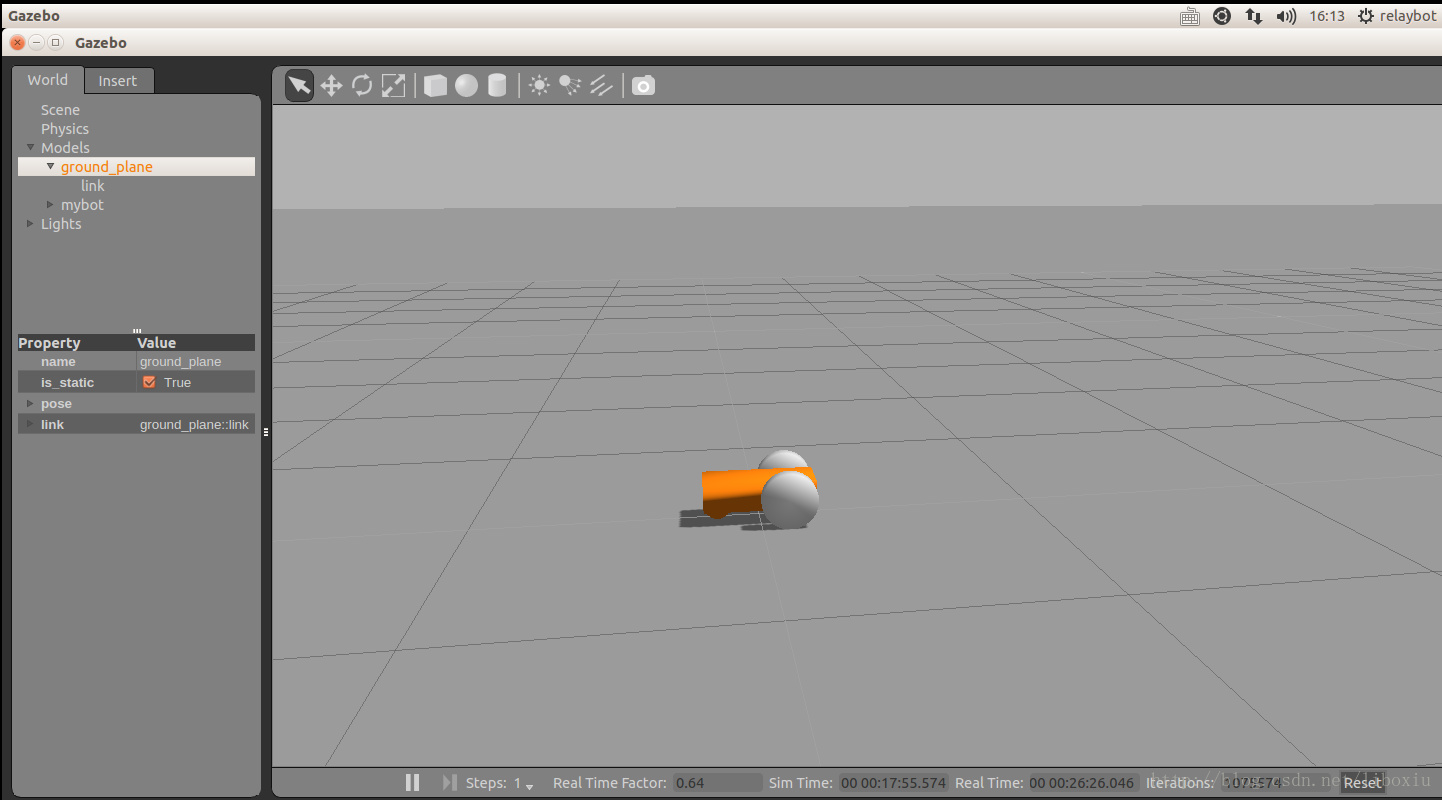
~/mybot_ws$ roslaunch mybot_gazebo mybot_world.launch
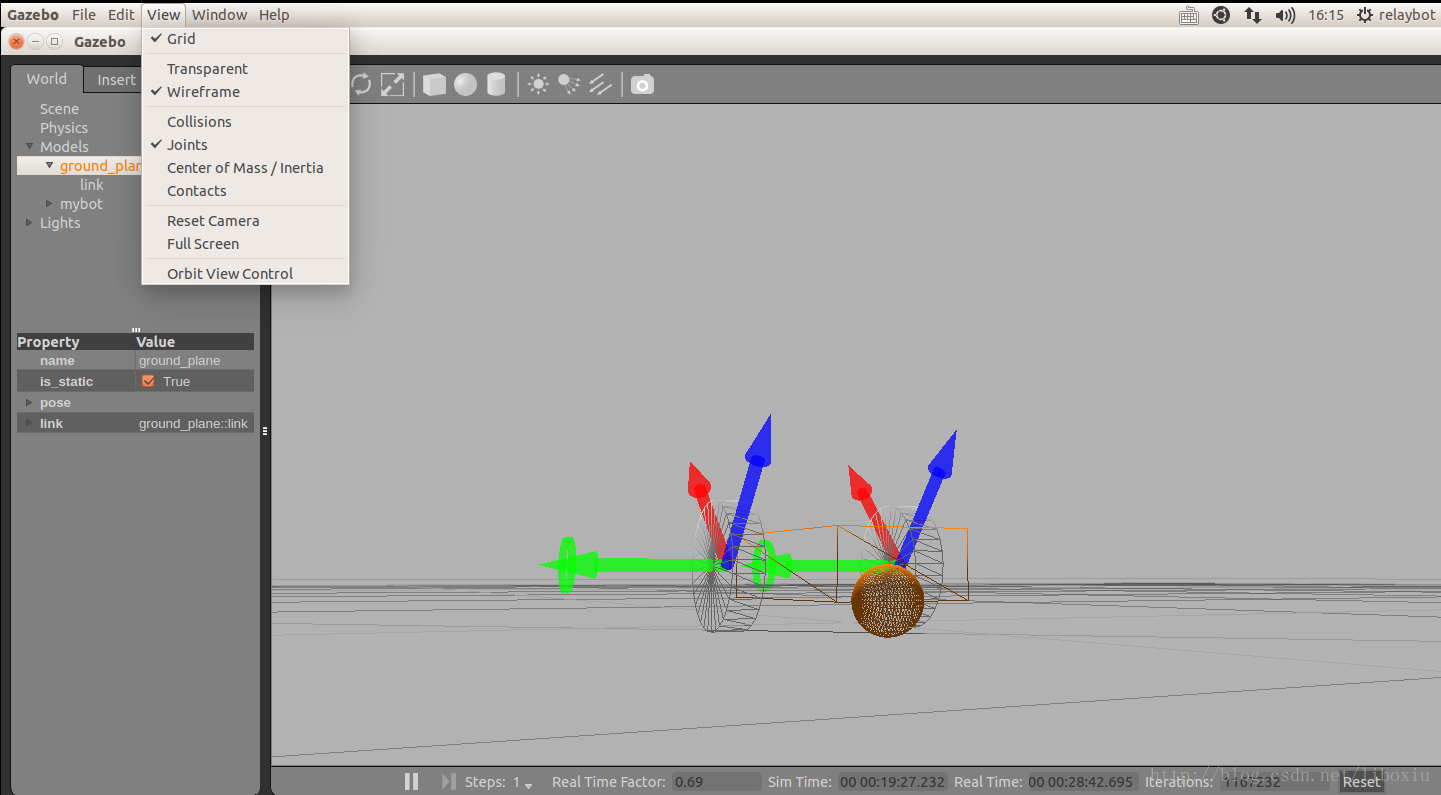
在view中选中wireframe和joints,可以调整角度可以查看下面的效果。
5、通过topic信息控制小车运行
新建终端:
~/mybot_ws$ rostopic pub /cmd_vel geometry_msgs/Twist ”
按tab键,补全命令,更改后得到如下:
linear:
x: 0.2
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 0.1”
回车即可,小车跑起来了!!
