转载于:https://blog.csdn.net/mike8825/article/details/50762023
1.先了解一下spi协议的基本信息,包括spi的工作原理,4中不同模式的区别。
2.添加spi设备
static struct spi_board_info xxxxx_spi0_board[] = {
[0] = {
.modalias = "xxxx", //设备名字
.bus_num = 0, //设备在第几个spi控制器上
.chip_select = 0, //片选号,用于区别其他从设备
.mode = 0, ///传输模式
.max_speed_hz = 2*1000*1000, //最大工作频率(在我调试的平台上这个设置无效,spi控制器驱动初始化时的时钟是多少,通信的时候就用多少)
},
};
可参考
http://blog.csdn.net/vanbreaker/article/details/7733476
3.内核中spi编程模板,内核中有许多的spi驱动可供参考(driver/spi/*)
http://blog.csdn.net/mike8825/article/details/51335582
4在调试的时候,先用示波器量一下每跟信号线的信号是否正常。
spi的波形如下图,不同的工作模式略有不同,但万变不离其宗。

CS(片选)(平常是高电平,通信时被拉低)
CLK(时钟) 测量clk的频率是否为设定值
MOSI(主机输出从机输入)
MISO(主机输入从机输出)
4.1有些芯片要通过拉高或拉低某一引脚来作为主机或从机,这个要看芯片手册。
4.2之前遇到一种情况,CS没有信号,居然发现芯片的CS引脚没有连接到CPU上,芯片怎么可能正常工作呢。
4.3MISO读回来的数据全部是0
4.3.1通过示波器量出来的信号也的确是0,查看芯片手册才知道,原来这个引脚被设置成高阻态了,要拉高另一个引脚才能作为MISO功能。
4.3.2根据芯片手册,要读一个寄存器的值,只有发几个特定的字节过去,然后接着读就可以了,可是读回来的值全部是零。从芯片手册中,读寄存器的值的时序为下图

代码是这样实现的
-
int xxx_spi_read(unsigned int addr, unsigned int *val, size_t len) -
{ -
struct spi_device *spi =xxx_spi; -
struct spi_message message; -
struct spi_transfer x[3]; -
int status; -
u8 write_buf[5]; -
u8 read_buf[4]; -
write_buf[0] =(len == 4) ? xxxx_SPI_CMD_32_READ : xxxx_SPI_CMD_16_READ; -
write_buf[1] = (addr & 0xff000000) >> 24; -
write_buf[2] = (addr & 0x00ff0000) >> 16; -
write_buf[3] = (addr & 0x0000ff00) >> 8; -
write_buf[4] = (addr & 0x000000ff) >> 0; -
spi_message_init(&message); -
memset(x, 0, sizeof(x)); -
x[0].len = 5;//(1+4) -
x[0].tx_buf = write_buf; //命令+地址 -
spi_message_add_tail(&x[0], &message); -
x[1].len = 4;//4 -
x[1].tx_buf = write_buf; //dummy(任意字节) -
spi_message_add_tail(&x[1], &message); -
x[2].len = len; -
x[2].rx_buf = read_buf; //接收数据 -
spi_message_add_tail(&x[2], &message); -
status = spi_sync(spi, &message); -
if (len == 4) -
*val = read_buf[3] | read_buf[2] << 8 | read_buf[1] << 16 | -
read_buf[0] << 24; -
else -
*val = read_buf[1] | read_buf[0] << 8; -
return status; -
}
重复跑这段代码,发现第二个spi_transfer发过去的全部是0,x[1].tx_buf = write_buf,明明不是0啊。也就是说第二个和第三个spi_transfer的数据全部丢失。于是就用一个spi_transfer来实现传输,改动如下
-
int xxx_spi_read(unsigned int addr, unsigned int *val, size_t len) -
{ -
struct spi_device *spi = xxxx_spi; -
struct spi_message message; -
struct spi_transfer x[1]; -
int status; -
u8 write_buf[13]; -
u8 read_buf[13]; -
write_buf[0] =(len == 4) ? xxxx_SPI_CMD_32_READ : xxxx_SPI_CMD_16_READ; -
write_buf[1] = (addr & 0xff000000) >> 24; -
write_buf[2] = (addr & 0x00ff0000) >> 16; -
write_buf[3] = (addr & 0x0000ff00) >> 8; -
write_buf[4] = (addr & 0x000000ff) >> 0; -
spi_message_init(&message); -
memset(x, 0, sizeof(x)); -
x[0].len = 9+len; -
x[0].tx_buf = write_buf; -
x[0].rx_buf = read_buf; -
spi_message_add_tail(&x[0], &message); -
status = spi_sync(spi, &message); -
if (len == 4) -
*val = read_buf[12] | read_buf[11] << 8 | read_buf[10] << 16 | -
read_buf[9] << 24; //接收到的第10个字节有效 -
else -
*val = read_buf[10] | read_buf[9] << 8; -
return status; -
}
一个message只有一个transfer,读回来的数据就正常了。这个给spi控制器驱动实现有关,也就是芯片厂商没做好适配造成对的。
4.4写寄存器的信号正常,也有应答信号,但读不了数据。感觉信号都对了,但通信还是有问题,觉得很不合理。于是,将芯片上的电源引脚测量了一遍,发现问题了,某一路电源没有供电(硬件的同事设计的电路),将这一路电源供电上,通信就没有问题了。
4.5在imx平台上,spi的管脚可以功能复用。比如,第一路spi可以多路gpio供选择(如下图),硬件上连接到了那几个gpio上,就需要在设备树上添加相应的信息,具体的可参考对应的pdf。

4.6在调试一个降噪模块时,发现每次发过去的信号,应答波形总是不对。这里,刚开始发送的第一个字节为0x05,通过示波器测量出的波形为

由于这里的spi设置为工作模式为0,那么在数据在CLK的上升沿有效,根据协议读取的数据为1010 000B,就是0xA0。可是0x05,对应的二进制为0000 0101B,原来这里反过来了。说好的高位先传输呢,直接跟cpu厂商那边的工作人员联系一下,原来高位或低位先传输是可以配置的。配置对传输方式后,发出的信号如下,接受到的应答信号也正常了。

4.7与上图相比,在每传输完一个字节后,spi的时钟会有一定的延时,这中波形与上图也是一样的。

4.9当波形正确,芯片仍不正常工作时,这时要检测一下硬件电路了。
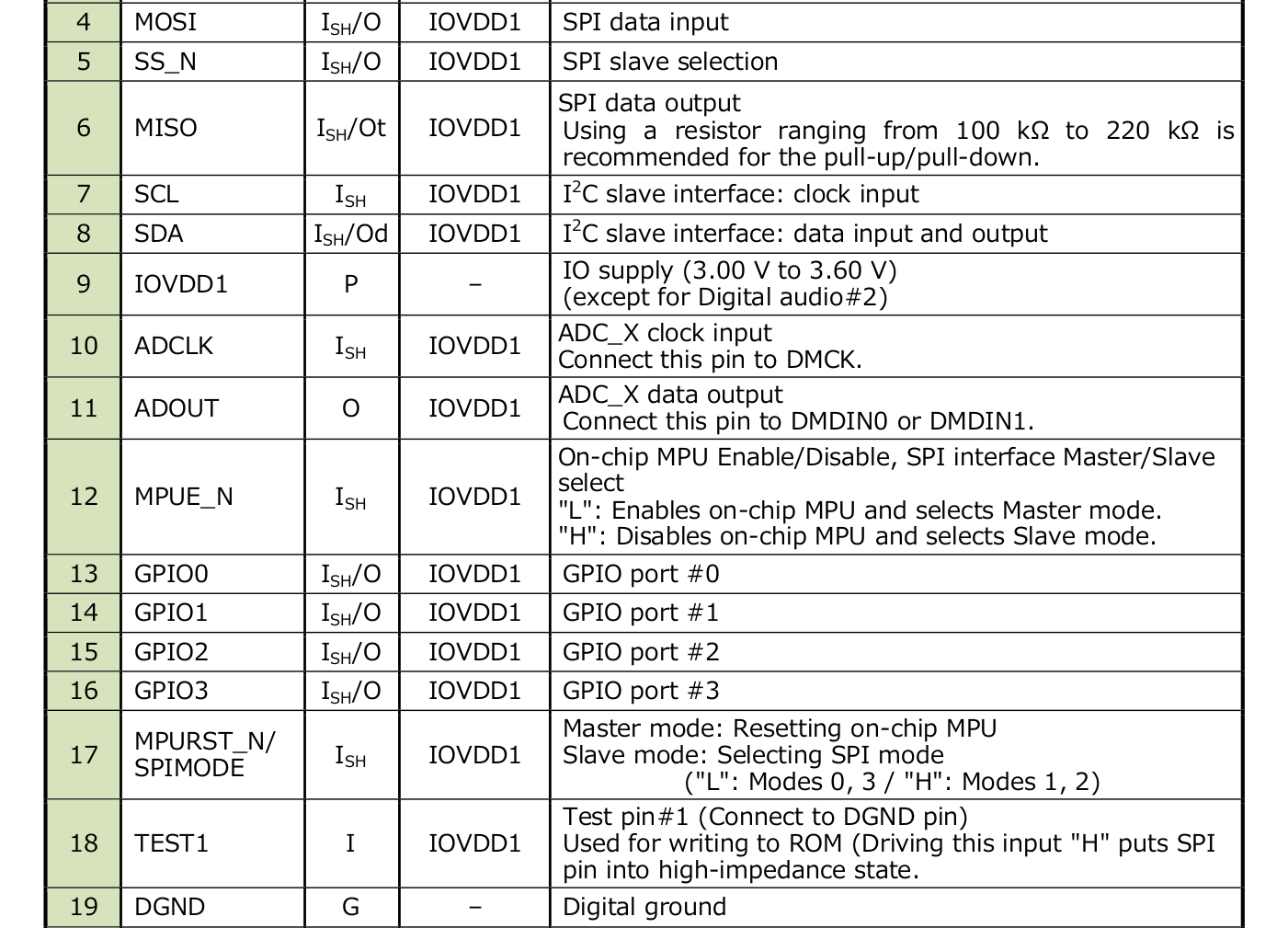
以上图为例,要注意的就有以上几点
6脚需要用100k到220k的电阻来上拉或下拉
9脚需要供电
12脚通过高低电平来选择主从模式
17脚芯片处在主机模式下,该引脚可复位MPU.从机模式先,高低电平来决定工作模式
18脚要连接到地,如果拉高就可以让spi引脚变为高阻状态
这些在芯片工作不正常时,都是需要认真检查的。