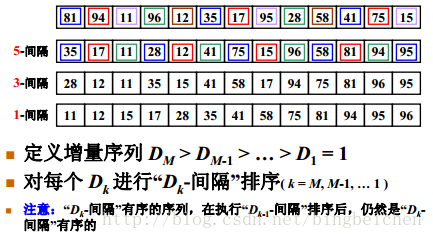
算法描述:也叫递减增量排序,是插入排序的一种更高效的改进版本,其通过将待排序的数列分为几个区域来提升插入排序的性能。希尔排序的动态图示如下所示:
复杂度分析:最坏时间复杂度为
主要特点:
- 不稳定;
- 不占用额外内存;
- 原始的希尔排序增量序列
(DM=N/2,Dk=Dk+1/2) :增量元素不互质,则小增量可能根本不起作用。
C语言描述:
#include<stdio.h>
typedef int ElementType;
void Swap(ElementType *A, ElementType *B) {
ElementType temp = *A;
*A = *B;
*B = temp;
}
/* 原始希尔排序C语言描述 */
void Shell_Sort(ElementType Data[], int N) {
int D, P, i;
ElementType temp;
for (D = N / 2; D > 0; D /= 2) { /*原始希尔排序增量序列*/
for (P = D; P < N; P++) { /*插入排序*/
temp = Data[P];
for (i = P; i >= D && Data[i - D]>temp; i -= D)
Data[i] = Data[i - D];
Data[i] = temp;
}
}
}
int main() {
ElementType Data[] = {19, 3, 10, 20, 22, 28, 33, 23, 15, 30};
Shell_Sort(Data, 10);
return 0;
}附:更多增量序列
- Hibbard增量序列:
-
Dk=2k−1 —— 相邻元素互质 - 最坏情况:
Tworst=Θ(N3/2) - 猜想:
Tavg=O(N5/4)
-
- Sedgewick增量序列:
-
1,5,19,41,109,... ——9×4i−9×2i+1 或4i−3×2i+1 - 最坏情况:
Tworst=O(N4/3) - 猜想:
Tavg=O(N7/6)
-