参考:
https://wenku.baidu.com/view/88a625c4710abb68a98271fe910ef12d2af9a98c.html
https://wenku.baidu.com/view/5a4d0a75581b6bd97e19ea21.html
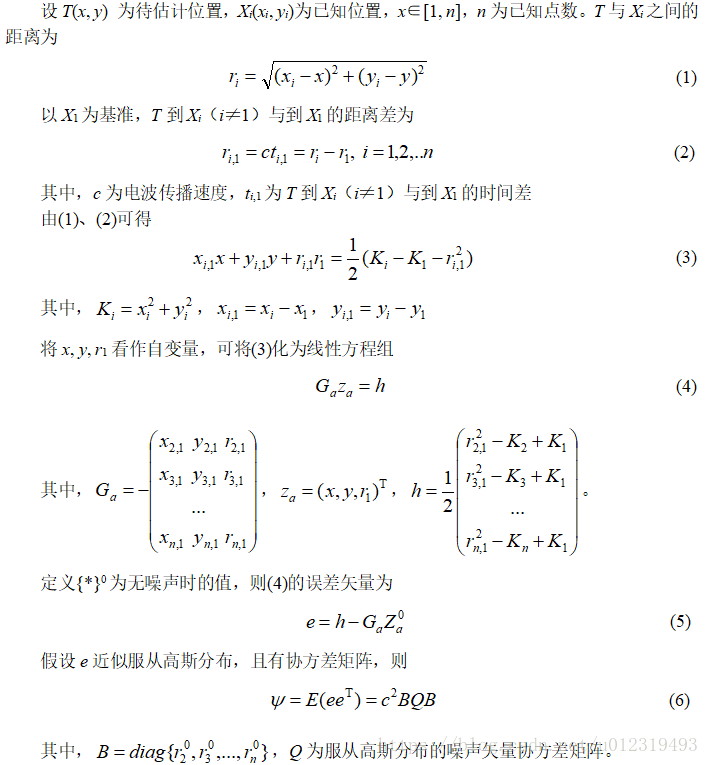
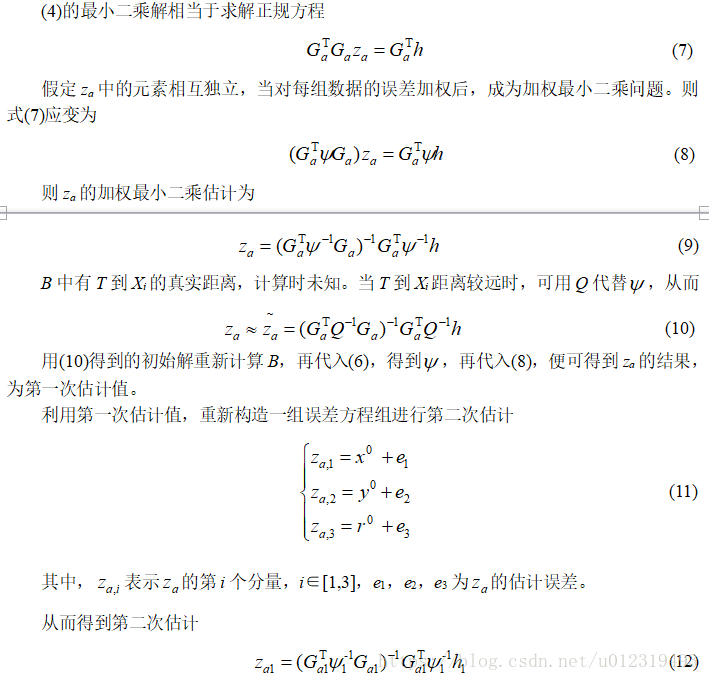
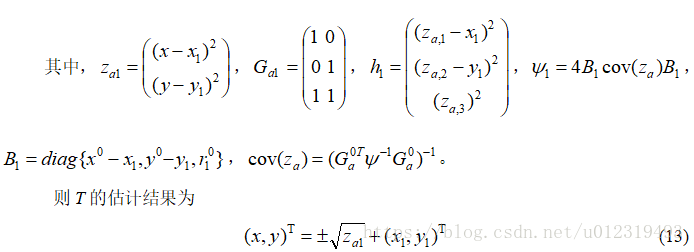
根据已知点和未知点之间的距离、已知点的坐标,求未知点坐标。
推导
from math import *
import numpy as np
from numpy.linalg import *
from matplotlib.ticker import MultipleLocator, FormatStrFormatter
import matplotlib.pyplot as plt
def chan_location(ri_1, X, Q):
n = len(X)
k = (X**2).sum(1) # 将数组各原始平方后按列求和
h = 0.5 * (ri_1**2 - k[1:n] + k[0])
Ga = []
for i in range(1, n):
Ga.append([X[i][0] - X[0][0], X[i][1] - X[0][1], ri_1[i-1]])
Ga = np.array(Ga)
Ga = -Ga
# 第一次WLS估计结果(远距算法)
Za = inv((Ga.T).dot(inv(Q)).dot(Ga)).dot((Ga.T).dot(inv(Q)).dot(h))
# 第一次WLS计算(近距算法)
r = np.sqrt(((X[1:n] - Za[0:2])**2).sum(1))
B = np.diag(r)
Fa = B.dot(Q).dot(B)
Za1 = inv((Ga.T).dot(inv(Fa)).dot(Ga)).dot((Ga.T)).dot(inv(Fa)).dot(h)
Za_cov = inv( (Ga.T).dot(inv(Fa)).dot(Ga) )
# 第二次WLS计算(近距算法)
Ga1 = np.array([[1,0], [0,1], [1,1]])
h1 = np.array([(Za1[0] - X[0][0])**2, (Za1[1] - X[0][1])**2, Za1[2]**2])
B1 = np.diag([Za1[0] - X[0][0], Za1[1]-X[0][1], Za1[2]])
Fa1 = 4 * (B1).dot(Za_cov).dot(B1)
Za2 = inv((Ga1.T).dot(inv(Fa1)).dot(Ga1)).dot((Ga1.T)).dot(inv(Fa1)).dot(h1)
pos1 = np.sqrt(Za2) + X[0];
pos2 = -np.sqrt(Za2) + X[0];
pos3 = [np.sqrt(Za2[0]), -np.sqrt(Za2[1])] + X[0]
pos4 = [-np.sqrt(Za2[0]), np.sqrt(Za2[1])] + X[0]
pos = [pos1, pos2]#, pos3, pos4]
return pos
def drawPtTest(pos, tag, X):
figsize = 5, 4 # 设定整张图片大小
plt.subplots(figsize=figsize)
ax1 = plt.subplot(1, 1, 1)
pos = np.array(pos)
X = np.array(X)
ax1.scatter(pos[:,0], pos[:,1], s=80, c='g', marker='o')
ax1.scatter(tag[0], tag[1], s=120, c='r', marker='*')
ax1.scatter(X[:,0], X[:,1], s=150, c='k', marker='1')
plt.show()
def test():
delta = 2
dis = 200
R = 200
X = [] # 已知点坐标
X1 = (dis, dis)
X.append(X1)
T = (dis*2, dis*2) # 未知点,待求
n = 7 # 已知点的个数
X.append((dis + R * sqrt(3), dis))
X.append((dis - R * sqrt(3), dis))
X.append((dis + R * sqrt(3)/2, dis + R * 1.5))
X.append((dis - R * sqrt(3)/2, dis + R * 1.5))
X.append((dis - R * sqrt(3)/2, dis - R * 1.5))
X.append((dis + R * sqrt(3)/2, dis - R * 1.5))
X = map(list, X) # 整体映射功能,将列表或元组转换为每个元素都为列表样式的列表
X = np.array(X)
Q = (0.5 * np.eye(n-1) + 0.5 * np.ones((n-1, n-1))) * (delta**2) # 噪声协方差矩阵
Nerror = np.random.normal(0, delta, n-1) # 产生随机误差
ri_1 = []
for i in range(1, n): # 各已知点与未知点之间的距离,已知
ri_1.append(sqrt((X[i][0] - T[0])**2 + (X[i][1] - T[1])**2) - r1 + Nerror[i-1])
ri_1 = np.array(ri_1)
pos = chan_location(ri_1, X, Q) # 最终对比,从中选出一个正确的定位点
drawPtTest(pos, T, X)
# 打印结果
print pos
for i in range(0, 2):
print (sqrt((pos[i][0] - T[0])**2 + (pos[i][1] - T[1])**2))
if __name__ == "__main__":
test() 结果:
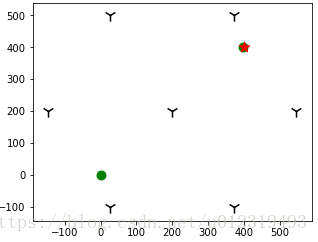
黑色三边为已知位置,绿色圆为计算结果,红色五角星为真实目标位置。
定位误差:
1.39686305158
564.640832365