文件下载地址:点击打开链接
实现功能:
初始化三个串口,调用两个,一个串口发送一个串口接收
串口数据接收除接收数据外还需给出帧有效数据字节长度;
串口可使用USART1、USART2、USART3,串口参数能自由设置;
实现不定长数据帧的串口收发
设计思路及流程:
将中断串口参数设置初始化,中断函数的处理写在USART.C 文件里面,再使用主函数文件进行调用。
1. 建立usart.c usart.h 文件
扫描二维码关注公众号,回复:
1748195 查看本文章

3个串口的串口参数能自由设置,结构体初始化
Usart1:
Usart2:
\
Usart3:
中断函数编写:
定义中断函数数组
串口一中断函数;
if(USART_GetITStatus(USART1,USART_IT_RXNE) != RESET)//
接收中断,每接收一个字节(8位二进制数据),中断一次,每次中断(即每接收一个数据)都执行一次下列程序
串口二中断函数;
串口三中断函数;
字符串处理函数:
Usaert.h
设置最大接收字节数,使能串口
2.主函数实现:
Main.c
包含头文件,定义数组
定义变量,延时,串口初始化
While 循环内 设置数组长度length每次接收到一个字节的数据后usart1_in++,
2. 实际功能实现任意两个串口收发
引脚设置: PA9 USART1_TX
PA10 USART1_RX
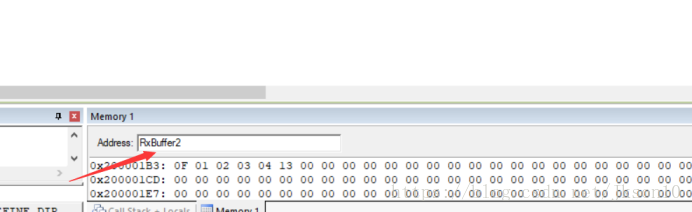
发送串口修改选择箭头所示的串口名,可以修改为USART2,USART3
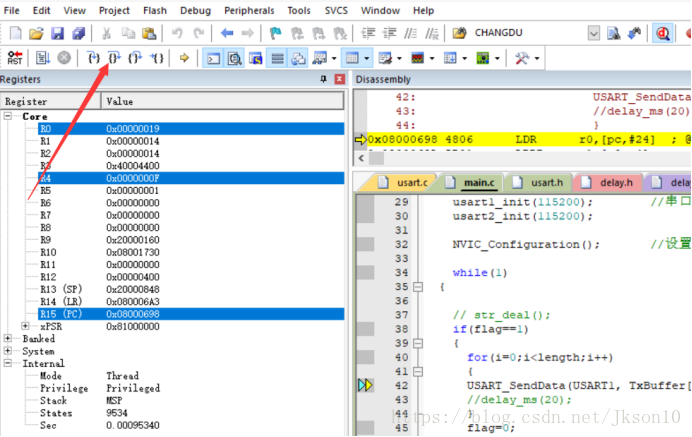
到目前为止这种方法编写的程序只能进入debug模式进行演示,还必须得分步调试,其它串口才能收到,如图所示
话不多说,直接上代码
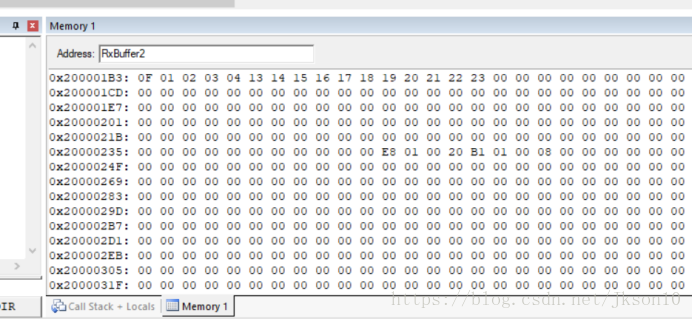
串口二接收情况
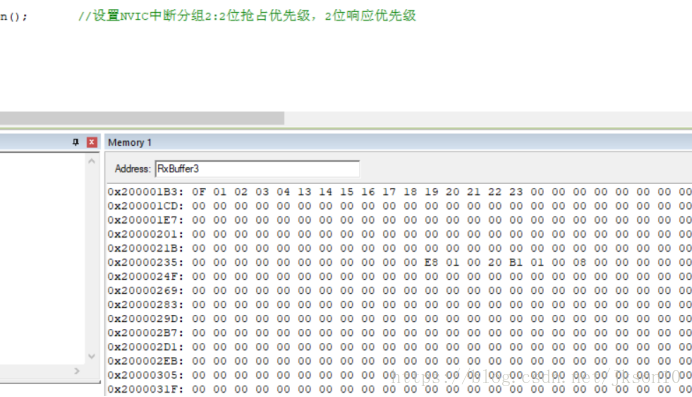
串口三接收情况
USART.C
#include "sys.h"
#include "usart.h"
#include <stdio.h>
#include <stdlib.h>
#if SYSTEM_SUPPORT_UCOS
#include "includes.h"
#endif
#if 1
#pragma import(__use_no_semihosting)
//±ê×¼¿âÐèÒªµÄÖ§³Öº¯Êý
struct __FILE
{
int handle;
};
FILE __stdout;
//±ÜÃâʹÓðëÖ÷»úģʽ
_sys_exit(int x)
{
x = x;
}
//Öض¨Òåfputcº¯Êý
int fputc1(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//Ñ»··¢ËÍ,Ö±µ½·¢ËÍÍê±Ï
USART1->DR = (u8) ch;
return ch;
}
int fputc2(int ch, FILE *f)
{
while((USART2->SR&0X40)==0);//Ñ»··¢ËÍ,Ö±µ½·¢ËÍÍê±Ï
USART2->DR = (u8) ch;
return ch;
}
int fputc3(int ch, FILE *f)
{
while((USART3->SR&0X40)==0);//Ñ»··¢ËÍ,Ö±µ½·¢ËÍÍê±Ï
USART3->DR = (u8) ch;
return ch;
}
#endif
#if EN_USARTx_RX //Èç¹ûʹÄÜÁ˽ÓÊÕ
//´®¿Ú1ÖжϷþÎñ³ÌÐò
u8 USART_RX_BUF[USART_REC_LEN]; //½ÓÊÕ»º³å,×î´óUSART_REC_LEN¸ö×Ö½Ú.
//½ÓÊÕ״̬
//bit15£¬ ½ÓÊÕÍê³É±êÖ¾
//bit14£¬ ½ÓÊÕµ½0x0d
//bit13~0£¬ ½ÓÊÕµ½µÄÓÐЧ×Ö½ÚÊýÄ¿
u16 USART_RX_STA=0; //½ÓÊÕ״̬±ê¼Ç
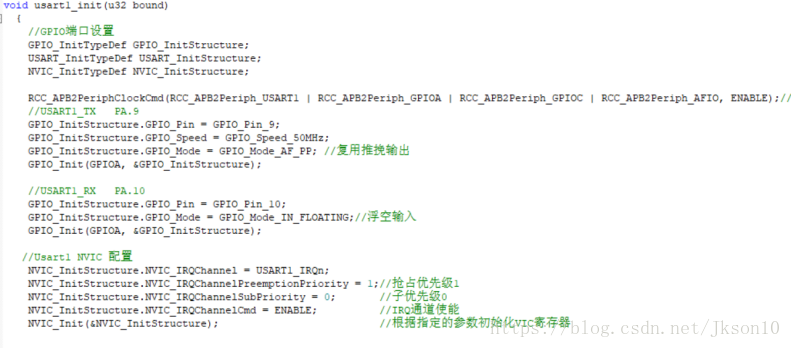
void usart1_init(u32 bound)
{
//GPIO¶Ë¿ÚÉèÖÃ
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOC | RCC_APB2Periph_AFIO, ENABLE);//ʹÄÜUSART1£¬GPIOAʱÖÓÒÔ¼°¸´Óù¦ÄÜʱÖÓ
//USART1_TX PA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //¸´ÓÃÍÆÍìÊä³ö
GPIO_Init(GPIOA, &GPIO_InitStructure);
//USART1_RX PA.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//¸¡¿ÕÊäÈë
GPIO_Init(GPIOA, &GPIO_InitStructure);
//Usart1 NVIC ÅäÖÃ
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;//ÇÀÕ¼ÓÅÏȼ¶1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //×ÓÓÅÏȼ¶0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQͨµÀʹÄÜ
NVIC_Init(&NVIC_InitStructure); //¸ù¾ÝÖ¸¶¨µÄ²ÎÊý³õʼ»¯VIC¼Ä´æÆ÷
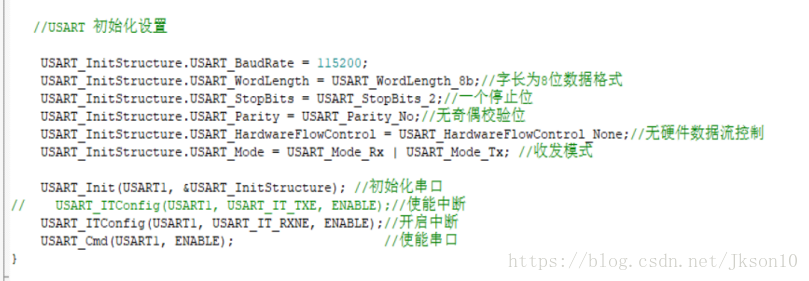
//USART ³õʼ»¯ÉèÖÃ
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//×Ö³¤Îª8λÊý¾Ý¸ñʽ
USART_InitStructure.USART_StopBits = USART_StopBits_2;//Ò»¸öֹͣλ
USART_InitStructure.USART_Parity = USART_Parity_No;//ÎÞÆæżУÑéλ
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//ÎÞÓ²¼þÊý¾ÝÁ÷¿ØÖÆ
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //ÊÕ·¢Ä£Ê½
USART_Init(USART1, &USART_InitStructure); //³õʼ»¯´®¿Ú
// USART_ITConfig(USART1, USART_IT_TXE, ENABLE);//ʹÄÜÖжÏ
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);//¿ªÆôÖжÏ
USART_Cmd(USART1, ENABLE); //ʹÄÜ´®¿Ú
}
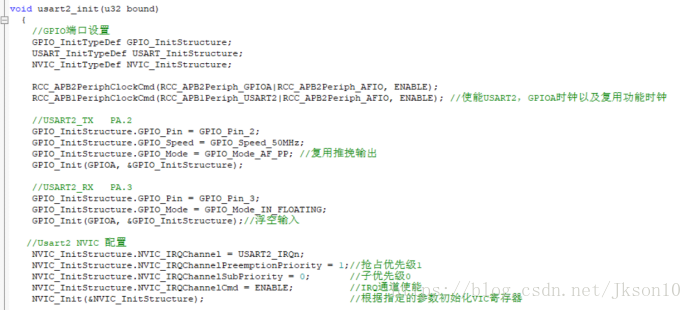
void usart2_init(u32 bound)
{
//GPIO¶Ë¿ÚÉèÖÃ
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_AFIO, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2|RCC_APB2Periph_AFIO, ENABLE); //ʹÄÜUSART2£¬GPIOAʱÖÓÒÔ¼°¸´Óù¦ÄÜʱÖÓ
//USART2_TX PA.2
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //¸´ÓÃÍÆÍìÊä³ö
GPIO_Init(GPIOA, &GPIO_InitStructure);
//USART2_RX PA.3
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);//¸¡¿ÕÊäÈë
//Usart2 NVIC ÅäÖÃ
NVIC_InitStructure.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;//ÇÀÕ¼ÓÅÏȼ¶1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //×ÓÓÅÏȼ¶0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQͨµÀʹÄÜ
NVIC_Init(&NVIC_InitStructure); //¸ù¾ÝÖ¸¶¨µÄ²ÎÊý³õʼ»¯VIC¼Ä´æÆ÷
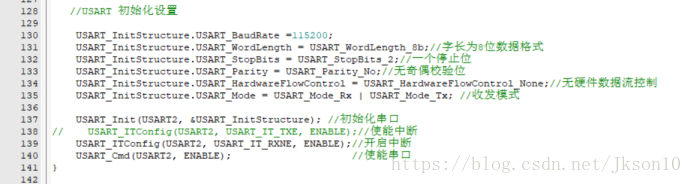
//USART ³õʼ»¯ÉèÖÃ
USART_InitStructure.USART_BaudRate =115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//×Ö³¤Îª8λÊý¾Ý¸ñʽ
USART_InitStructure.USART_StopBits = USART_StopBits_2;//Ò»¸öֹͣλ
USART_InitStructure.USART_Parity = USART_Parity_No;//ÎÞÆæżУÑéλ
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//ÎÞÓ²¼þÊý¾ÝÁ÷¿ØÖÆ
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //ÊÕ·¢Ä£Ê½
USART_Init(USART2, &USART_InitStructure); //³õʼ»¯´®¿Ú
// USART_ITConfig(USART2, USART_IT_TXE, ENABLE);//ʹÄÜÖжÏ
USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);//¿ªÆôÖжÏ
USART_Cmd(USART2, ENABLE); //ʹÄÜ´®¿Ú
}
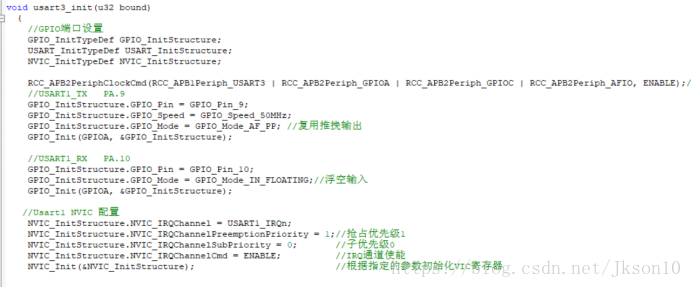
void usart3_init(u32 bound)
{
//GPIO¶Ë¿ÚÉèÖÃ
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB1Periph_USART3 | RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOC | RCC_APB2Periph_AFIO, ENABLE);//ʹÄÜUSART1£¬GPIOAʱÖÓÒÔ¼°¸´Óù¦ÄÜʱÖÓ
//USART3 _TX PA.9
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //¸´ÓÃÍÆÍìÊä³ö
GPIO_Init(GPIOA, &GPIO_InitStructure);
//USART1_RX PA.10
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;//¸¡¿ÕÊäÈë
GPIO_Init(GPIOA, &GPIO_InitStructure);
//Usart3 NVIC ÅäÖÃ
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;//ÇÀÕ¼ÓÅÏȼ¶1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //×ÓÓÅÏȼ¶0
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQͨµÀʹÄÜ
NVIC_Init(&NVIC_InitStructure); //¸ù¾ÝÖ¸¶¨µÄ²ÎÊý³õʼ»¯VIC¼Ä´æÆ÷
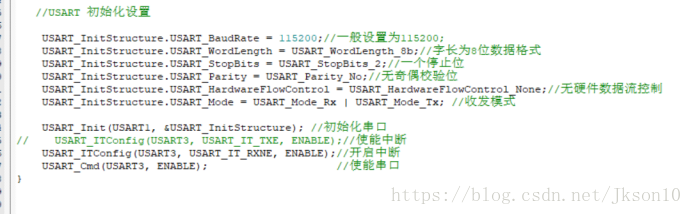
//USART ³õʼ»¯ÉèÖÃ
USART_InitStructure.USART_BaudRate = 115200;//Ò»°ãÉèÖÃΪ115200;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//×Ö³¤Îª8λÊý¾Ý¸ñʽ
USART_InitStructure.USART_StopBits = USART_StopBits_2;//Ò»¸öֹͣλ
USART_InitStructure.USART_Parity = USART_Parity_No;//ÎÞÆæżУÑéλ
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//ÎÞÓ²¼þÊý¾ÝÁ÷¿ØÖÆ
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //ÊÕ·¢Ä£Ê½
USART_Init(USART1, &USART_InitStructure); //³õʼ»¯´®¿Ú
// USART_ITConfig(USART3, USART_IT_TXE, ENABLE);//ʹÄÜÖжÏ
USART_ITConfig(USART3, USART_IT_RXNE, ENABLE);//¿ªÆôÖжÏ
USART_Cmd(USART3, ENABLE); //ʹÄÜ´®¿Ú
}
/* ***************************************ÖжϺ¯Êý ********************************************************/
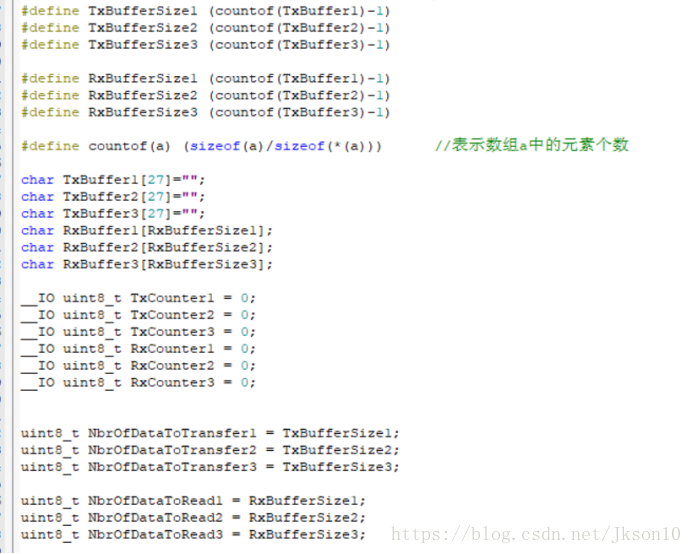
#define TxBufferSize1 (countof(TxBuffer1)-1)
#define TxBufferSize2 (countof(TxBuffer2)-1)
#define TxBufferSize3 (countof(TxBuffer3)-1)
#define RxBufferSize1 (countof(TxBuffer1)-1)
#define RxBufferSize2 (countof(TxBuffer2)-1)
#define RxBufferSize3 (countof(TxBuffer3)-1)
#define countof(a) (sizeof(a)/sizeof(*(a))) //±íʾÊý×éaÖеÄÔªËظöÊý
char TxBuffer1[27]="";
char TxBuffer2[27]="";
char TxBuffer3[27]="";
char RxBuffer1[RxBufferSize1];
char RxBuffer2[RxBufferSize2];
char RxBuffer3[RxBufferSize3];
__IO uint8_t TxCounter1 = 0;
__IO uint8_t TxCounter2 = 0;
__IO uint8_t TxCounter3 = 0;
__IO uint8_t RxCounter1 = 0;
__IO uint8_t RxCounter2 = 0;
__IO uint8_t RxCounter3 = 0;
uint8_t NbrOfDataToTransfer1 = TxBufferSize1;
uint8_t NbrOfDataToTransfer2 = TxBufferSize2;
uint8_t NbrOfDataToTransfer3 = TxBufferSize3;
uint8_t NbrOfDataToRead1 = RxBufferSize1;
uint8_t NbrOfDataToRead2 = RxBufferSize2;
uint8_t NbrOfDataToRead3 = RxBufferSize3;
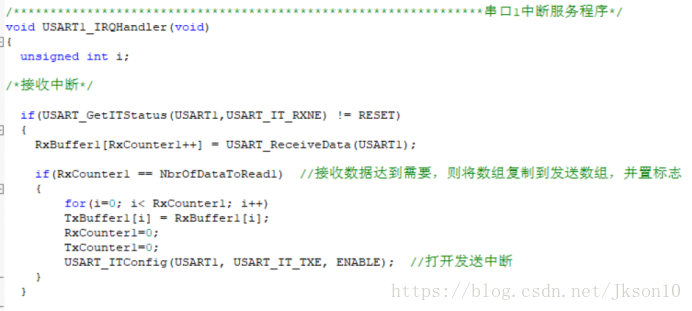
/****************************************************************´®¿Ú1ÖжϷþÎñ³ÌÐò*/
void USART1_IRQHandler(void)
{
unsigned int i;
/*½ÓÊÕÖжÏ*/
if(USART_GetITStatus(USART1,USART_IT_RXNE) != RESET)
{
RxBuffer1[RxCounter1++] = USART_ReceiveData(USART1);
if(RxCounter1 == NbrOfDataToRead1) //½ÓÊÕÊý¾Ý´ïµ½ÐèÒª£¬Ôò½«Êý×鸴ÖƵ½·¢ËÍÊý×飬²¢ÖñêÖ¾
{
for(i=0; i< RxCounter1; i++)
TxBuffer1[i] = RxBuffer1[i];
RxCounter1=0;
TxCounter1=0;
USART_ITConfig(USART1, USART_IT_TXE, ENABLE); //´ò¿ª·¢ËÍÖжÏ
}
}
/*USART1·¢ËÍÖжÏ*/
// if(USART_GetITStatus(USART1, USART_IT_TXE) != RESET)
// {
// USART_SendData(USART1, TxBuffer1[TxCounter1++]);
// if(TxCounter1 == NbrOfDataToTransfer1)//·¢ËÍÊý¾ÝÍê³É
// {
// USART_ITConfig(USART1, USART_IT_TXE, DISABLE); //¹Ø±Õ·¢ËÍÖжÏ
// }
// }
}
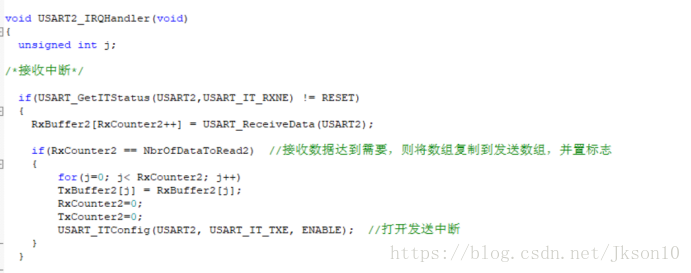
/*************************************************************************************´®¿Ú2ÖжϷþÎñ³ÌÐò*/
void USART2_IRQHandler(void)
{
unsigned int j;
/*½ÓÊÕÖжÏ*/
if(USART_GetITStatus(USART2,USART_IT_RXNE) != RESET)
{
RxBuffer2[RxCounter2++] = USART_ReceiveData(USART2);
if(RxCounter2 == NbrOfDataToRead2) //½ÓÊÕÊý¾Ý´ïµ½ÐèÒª£¬Ôò½«Êý×鸴ÖƵ½·¢ËÍÊý×飬²¢ÖñêÖ¾
{
for(j=0; j< RxCounter2; j++)
TxBuffer2[j] = RxBuffer2[j];
RxCounter2=0;
TxCounter2=0;
USART_ITConfig(USART2, USART_IT_TXE, ENABLE); //´ò¿ª·¢ËÍÖжÏ
}
}
/*USART2·¢ËÍÖжÏ*/
// if(USART_GetITStatus(USART2, USART_IT_TXE) != RESET)
// {
// USART_SendData(USART2, TxBuffer2[TxCounter2++]);
// if(TxCounter2 == NbrOfDataToTransfer2)//·¢ËÍÊý¾ÝÍê³É
// {
// USART_ITConfig(USART2, USART_IT_TXE, DISABLE); //¹Ø±Õ·¢ËÍÖжÏ
// }
// }
}
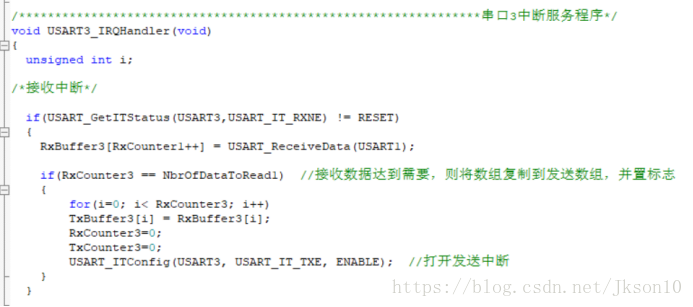
/****************************************************************´®¿Ú3ÖжϷþÎñ³ÌÐò*/
void USART3_IRQHandler(void)
{
unsigned int i;
/*½ÓÊÕÖжÏ*/
if(USART_GetITStatus(USART3,USART_IT_RXNE) != RESET)
{
RxBuffer3[RxCounter1++] = USART_ReceiveData(USART1);
if(RxCounter3 == NbrOfDataToRead1) //½ÓÊÕÊý¾Ý´ïµ½ÐèÒª£¬Ôò½«Êý×鸴ÖƵ½·¢ËÍÊý×飬²¢ÖñêÖ¾
{
for(i=0; i< RxCounter3; i++)
TxBuffer3[i] = RxBuffer3[i];
RxCounter3=0;
TxCounter3=0;
USART_ITConfig(USART3, USART_IT_TXE, ENABLE); //´ò¿ª·¢ËÍÖжÏ
}
}
/*USART1·¢ËÍÖжÏ*/
//
// if(USART_GetITStatus(USART3, USART_IT_TXE) != RESET)
// {
// USART_SendData(USART3, TxBuffer3[TxCounter3++]);
// if(TxCounter3 == NbrOfDataToTransfer3)//·¢ËÍÊý¾ÝÍê³É
// {
// USART_ITConfig(USART3, USART_IT_TXE, DISABLE); //¹Ø±Õ·¢ËÍÖжÏ
// }
// }
}
///**********************************************************************/////
char u0[]="";
char u1[]="";
char u2[]="";
char u3[]="";
char u4[]="";
char u5[]="";
char u6[]="";
int num0=0;
int num1=0;
int num2=0;
int num3=0;
int num4=0;
int num5=0;
int num6=0;
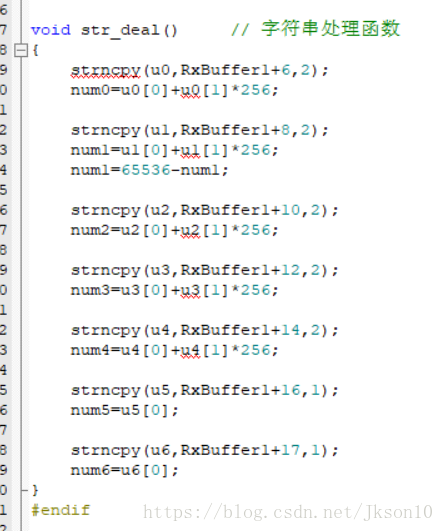
void str_deal() // ×Ö·û´®´¦Àíº¯Êý
{
strncpy(u0,RxBuffer1+6,2);
num0=u0[0]+u0[1]*256;
strncpy(u1,RxBuffer1+8,2);
num1=u1[0]+u1[1]*256;
num1=65536-num1;
strncpy(u2,RxBuffer1+10,2);
num2=u2[0]+u2[1]*256;
strncpy(u3,RxBuffer1+12,2);
num3=u3[0]+u3[1]*256;
strncpy(u4,RxBuffer1+14,2);
num4=u4[0]+u4[1]*256;
strncpy(u5,RxBuffer1+16,1);
num5=u5[0];
strncpy(u6,RxBuffer1+17,1);
num6=u6[0];
}
#endif
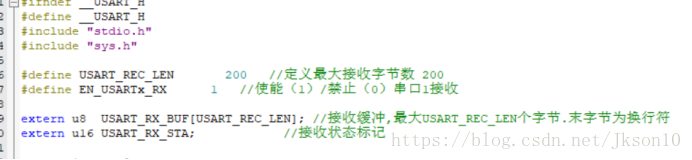
USAER.h
#ifndef __USART_H #define __USART_H #include "stdio.h" #include "sys.h" #define USART_REC_LEN 200 //¶¨Òå×î´ó½ÓÊÕ×Ö½ÚÊý 200 #define EN_USARTx_RX 1 //ʹÄÜ£¨1£©/½ûÖ¹£¨0£©´®¿Ú1½ÓÊÕ extern u8 USART_RX_BUF[USART_REC_LEN]; //½ÓÊÕ»º³å,×î´óUSART_REC_LEN¸ö×Ö½Ú.Ä©×Ö½ÚΪ»»Ðзû extern u16 USART_RX_STA; //½ÓÊÕ״̬±ê¼Ç extern int num0; extern int num1; extern int num2; extern int num3; extern int num4; extern int num5; extern int num6; extern int num7; void usart1_init(u32 bound); void usart2_init(u32 bound); void usart3_init(u32 bound); void USART1_IRQHandler(void); void USART2_IRQHandler(void); void USART3_IRQHandler(void); void str_deal(); #endif
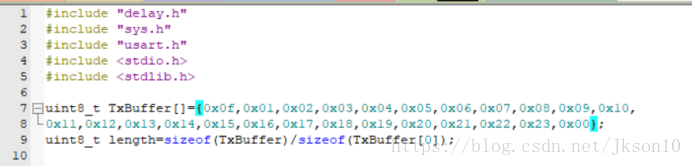
main.c
#include "delay.h"
#include "sys.h"
#include "usart.h"
#include <stdio.h>
#include <stdlib.h>
uint8_t TxBuffer[]={0x0f,0x01,0x02,0x03,0x04,0x05,0x06,0x07,0x08,0x09,0x10,
0x11,0x12,0x13,0x14,0x15,0x16,0x17,0x18,0x19,0x20,0x21,0x22,0x23,0x00};
uint8_t length=sizeof(TxBuffer)/sizeof(TxBuffer[0]);
int main(void)
{
u8 a,flag=1;
u8 i=0x00;
u8 j=0x00;
u8 k=0x00;
u8 l=0x00;
extern int num0;
extern int num1;
extern int num2;
extern int num3;
extern int num4;
extern int num5;
extern int num6;
extern int num7;
delay_init(); //ÑÓʱº¯Êý³õʼ»¯
usart1_init(115200); //´®¿Ú1³õʼ»¯Îª115200
usart2_init(115200);
NVIC_Configuration(); //ÉèÖÃNVICÖжϷÖ×é2:2λÇÀÕ¼ÓÅÏȼ¶£¬2λÏìÓ¦ÓÅÏȼ¶
while(1)
{
// str_deal();
if(flag==1)
{
for(i=0;i<length;i++)
{
USART_SendData(USART1, TxBuffer[i]);//´®¿ÚÒ»·¢ËÍ
//delay_ms(20);
}
flag=0;
}
}
}
话不多说,直接上代码