(基于奋斗stm32_v5开发板)
1、创建工程并编写C程序
#include"stm32f10x.h"
#include"stdarg.h"
void USART1_Config()
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
/* 使能USART1的时钟 */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA , ENABLE);
/*配置USART1 TX,并设置为复用推挽输出模式*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/*配置USART1 RX,并设置为浮空输入模式*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
/*配置USART1模式*/
USART_InitStructure.USART_BaudRate = 57600; //波特率设置为57600//
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //配置串口传输的字长8位//
USART_InitStructure.USART_StopBits = USART_StopBits_1; //配置停止位为1//
USART_InitStructure.USART_Parity = USART_Parity_No; //不设置奇偶校验位//
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //不采用硬件流//
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //配置串口为双线全双工通信,将RX、Tx模式都开启//
USART_Init(USART1, &USART_InitStructure); //向寄存器写入配置参数//
USART_Cmd(USART1, ENABLE); //使能USART1外设//
}
static char *itoa(int value, char *string, int radix)
{
int i, d;
int flag = 0;
char *ptr = string;
/*此实现只适用于十进制数*/
if(radix != 10)
{
*ptr = 0;
return string;
}
if(!value)
{
*ptr++ = 0x30;
*ptr = 0;
return string;
}
/*如果这是负值,则插入减号*/
if(value < 0)
{
*ptr++ = '-';
value *= -1;
}
for(i = 10000; i > 0; i /= 10)
{
d = value / i;
if (d || flag)
{
*ptr++ = (char)(d + 0x30);
value -= (d * i);
flag = 1;
}
}
/*NULL终止字符串*/
*ptr = 0;
return string;
}
void USART1_printf(USART_TypeDef* USARTx, uint8_t *Data,...)
{
const char *s;
int d;
char buf[16];
va_list ap;
va_start(ap, Data);
while (*Data != 0) //判断是否到达字符串结束符//
{
if(*Data == 0x5c) //'\'//
{
switch( *++Data )
{
case 'r': //回车符//
USART_SendData(USARTx, 0x0d);
Data ++;
break;
case 'n': //换行符//
USART_SendData(USARTx, 0x0a);
Data ++;
break;
default:
Data ++;
break;
}
}
else if (*Data == '%')
{
switch (*++Data)
{
case 's': //字符串//
s = va_arg(ap, const char *);
for(;*s; s++)
{
USART_SendData(USARTx, *s);
while( USART_GetFlagStatus(USARTx, USART_FLAG_TC) == RESET );
}
Data++;
break;
case 'd': //十进制//
d = va_arg(ap, int);
itoa(d, buf , 10);
for(s = buf;*s;s++)
{
USART_SendData(USARTx, *s);
while( USART_GetFlagStatus(USARTx, USART_FLAG_TC) == RESET );
}
Data++;
break;
default:
Data++;
break;
}
}
else USART_SendData(USARTx, *Data++);
while( USART_GetFlagStatus(USARTx, USART_FLAG_TC) == RESET );
}
}
int main(void)
{
/*初始化串口*/
USART1_Config();
USART1_printf(USART1,"\r\nHello Word\r\n");
while(1);
}
2、连接J-Link,编译,将程序下载进stm32开发板
3、连接串口,打开串口调试助手进行调试
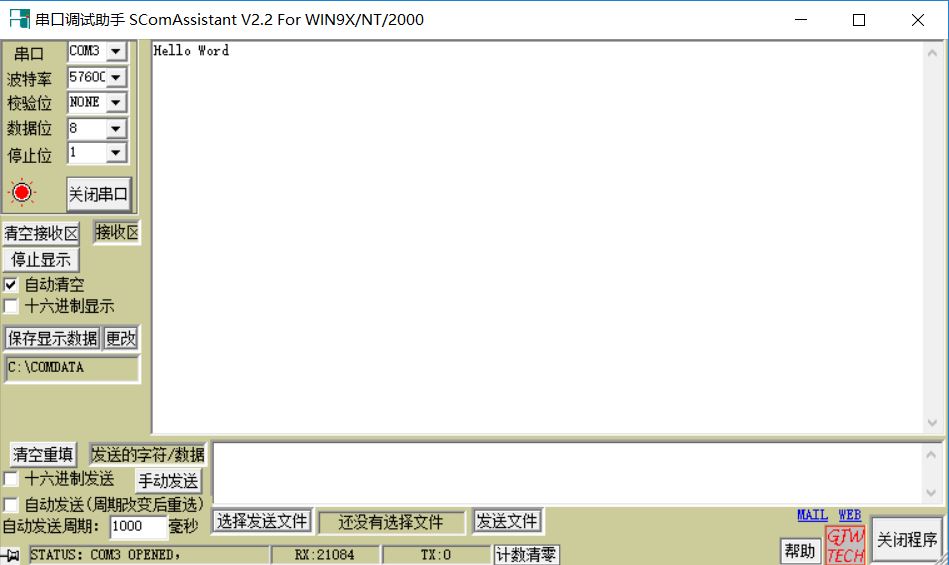
看到打印Hello World,目标完成
