简介
题目:《Conflict-Based Cross-View Consistency for Semi-Supervised Semantic Segmentation》, CVPR’23, 基于冲突的半监督语义分割跨视图一致性
日期:2023.5.2
单位:悉尼大学,香港大学,三星研究所
论文地址:https://arxiv.org/abs/2303.01276
GitHub:https://github.com/xiaoyao3302/CCVC
作者
Zicheng Wang,找不到
Zhen Zhao

个人主页:http://zhaozhen.me/

Xiaoxia Xing,找不到
Dong Xu, https://www.cs.hku.hk/people/academic-staff/dongxu

Xiangyu Kong,找不到
- 通讯作者
Luping Zhou,周泸萍, https://sites.google.com/view/lupingzhou

- 摘要
半监督语义分割(SSS)可以减少对大规模全注释训练数据的需求。现有方法处理伪标签时常常会受到确认偏差的影响,这可以通过联合训练框架来缓解。目前基于联合训练的SSS方法依赖于手工制作的每个扰动来防止不同的子网崩溃,但人为扰动难以得到最优解。本文提出一种新的基于冲突的跨视图一致性(CCVC)方法,该方法基于两个分支的联合训练框架,旨在强制两个子网从不相关的视图中学习信息特征。首先提出一种新的跨视图一致性(CVC)策略,该策略通过引入特征差异损失来鼓励两个子网从同一输入中学习不同的特征,同时这些不连续的特征有望生成输入的一致预测分数。CVC策略有助于防止两个子网陷入崩溃。此外,进一步提出一种基于冲突的伪标记(CPL)方法,以保证模型将从冲突预测中学习更多有用的信息,以保证训练过程的稳定。
一种基于冲突的跨视图一致性(CCVC)方法,该方法基于一个双分支协同训练框架,旨在强制两个子网从不相关的视图中学习信息特征
目前的半监督语义分割方法大致可分为两大类,即基于自训练的方法和基于一致性正则化的方法。大多数基于自训练的方法选择一组预测来生成伪标签以微调模型,而大多数基于一致性正则化的方法旨在使用弱增强输入的网络预测作为对强增强输入的那些预测的监督。然而,这两种方法都会遇到一个问题,即假阳性预测会引入不正确的伪标签,从而误导训练,这就是所谓的确认偏差。
协同训练是一种训练框架,可以应用于半监督学习方法。旨在学习两个子网,从不同的角度推理同一个实例,然后相互交换所学信息。这两个子网可以为彼此提供不同且互补的信息,从而实现稳定准确的预测,并减少确认偏差的影响
目标/动机
使用伪标签的方式,可能会受到确认偏置的影响,会由于训练不稳定导致性能下降。基于一致性正则化的方式显示出较好的性能,但大多数依赖于弱扰动输入的预测生成伪标签,再将伪标签作为强扰动输入预测的监督。也会受到确认偏置的影响。
**协同训练,能使不同的子网能够从不同的视图推断出相同的实例,并通过伪标记将从一个视图学到的知识转移到另一个视图。**特别是,协同训练依赖于多视图参考来增加对模型的感知,从而提高生成的伪标签的可靠性。关键是如何防止不同的子网相互崩溃,以便模型能够根据不同视图的输入做出正确的预测。然而,大多数SSS方法中使用的手工扰动并不能保证学习异质特征,从而有效地防止子网陷入崩溃。
面对上述问题,本文为SSS提出了一种新的基于冲突的跨视图一致性(CCVC)策略,该策略确保模型中的两个子网可以分别学习不同的特征,从而可以从两个互不相关的视图中学习可靠的预测以进行联合训练,从而进一步使每个子网能够做出可靠和有意义的预测
如图1所示,从交叉一致性正则化(CCR)模型的两个子网中提取的特征之间的相似性得分保持在较高水平,这表明CCR的推理观点有点相关。相反,CVC方法确保了重新分析的观点有足够的不同,从而产生更可靠的预测。

图1。我们比较了传统交叉一致性正则化(CCR)方法和我们的CVC方法的两个子网提取的特征之间的余弦相似值。我们还比较了用mIoU测量的两种方法的预测精度。我们证明了我们的CVC方法可以防止两个子网相互崩溃并能从无关的视图推断输入,而CCR不能保证推断的视图是不同的。我们展示了我们的新方法可以增加对模型的感知,从而产生更可靠的预测。实验是在原始Pascal VOC数据集上实现的,在1/4分割分区下,以ResNet-101作为编码器的主干
工作重点
首先提出了一种具有差异损失的交叉视图一致性(cross-view consistency,CVC)方法,以最小化两个子网提取的特征之间的相似性,从而鼓励它们提取不同的特征,从而防止两个子网相互崩塌。
然后,使用交叉伪标记将从一个子网学到的知识转移到另一个子网,以提高对网络的感知,从而正确地推理来自不同视图的相同输入,从而产生更可靠的预测(如图1)。
然而,差异损失可能会给模型引入太强的扰动,使得子网提取的特征可能包含用于预测的不太有意义的信息,从而导致来自两个子网的不一致和不可靠的预测。这将导致确认偏差问题,从而损害子网的联合训练。为了解决这个问题,进一步提出了一种基于冲突的伪标签(conflictbased pseudo-labelling,CPL)方法,鼓励每个子网的冲突预测生成的伪标签对彼此的预测进行更强的监督,以强制两个子网进行一致的预测,以保留预测以及预测的可靠性。通过这种方式,有望减少确认偏差的影响,使训练过程更加稳定。
方法
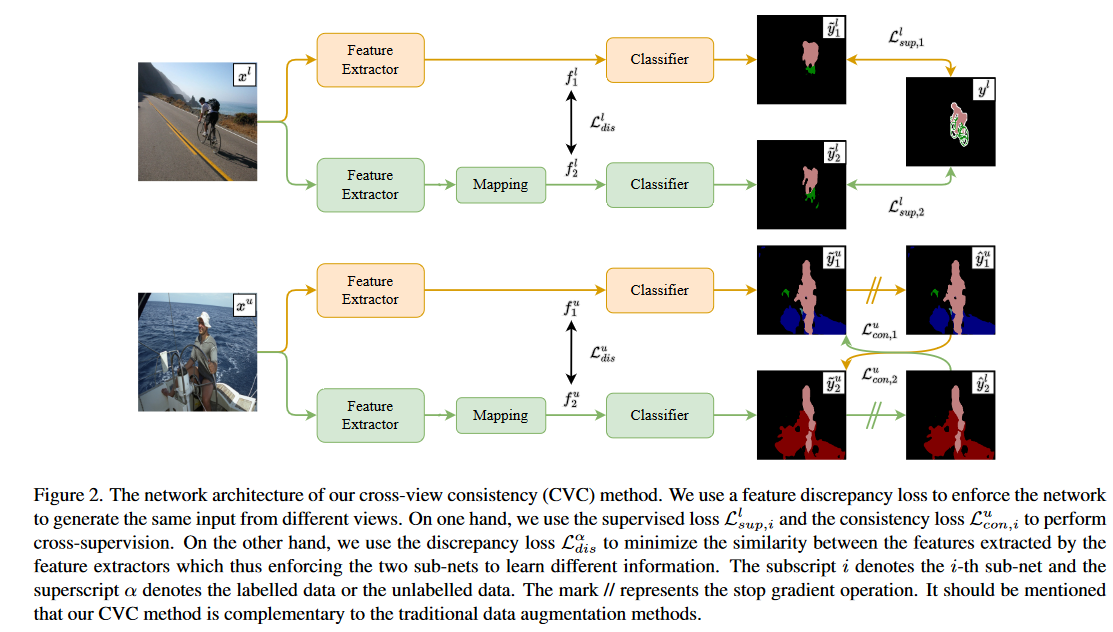
图2:我们的跨视图一致性(CVC)方法的网络架构。我们使用特征差异损失来强制网络从不同的视图生成相同的输入。一方面,我们使用监督损失Llsup,i和一致性损失Lucon,i来执行交叉监督。另一方面,我们使用差异损失Lαdis来最小化特征提取器提取的特征之间的相似性,从而强制两个子网学习不同的信息。下标i表示第i个子网,上标α表示标记数据或未标记数据。标记//表示停止梯度下降操作(表示禁止反向传播)。值得一提的是,我们的CVC方法是对传统数据增强方法的补充。
变量含义:
有标记图像:
无标记图像:
M, N:标记图像和未标记图像的数量。在大多数情况下,有N»M
大小为H×W和C通道的输入图像:
每个像素的一个独热标签: ,其中Y表示类别的总数
,其中Y表示类别的总数
CVC: 跨视图一致性
Cross-view consistency
两个子网,Ψ1和Ψ2,具有相似的架构,但两个子网的参数不共享
每个子网划分为特征提取器Ψf,i和分类器Ψcls,i
特征提取器Ψf,i在L2归一化后提取的特征表示为fαi
分类器Ψcls,i产生的预测表示为
i=1或2,分别表示子网1和2
α∈{u,l},分别表示标记数据流或未标记数据流
为了使两个子网能够推理来自不同视图的输入,因此提取的特征应该不同。
因此,我们使用差异损失Lαdis最小化每个特征提取器提取的特征fαi之间的余弦相似度,其可以公式化为:

系数1是为了确保差异损失的值总是非负的。
鼓励两个子网输出没有共同关系的特征,从而强制两个子网推理来自不同视图的输入。
多数SSS方法采用在ImageNet上预训练的ResNet作为DeepLabv3+的主干,并且仅以较小的学习率对主干进行微调,这使得本文的特征差异最大化操作难以实现。为了解决这个问题,本文通过使用卷积层将提取的特征映射到另一个特征空间,来实现网络的异构性
遵循与BYOL和SimSiam类似的操作,通过使用具有非线性层的简单卷积层(即Ψ映射)将Ψf,2提取的特征映射到另一个特征空间,来实现网络的异构性。将Ψf,2在映射后提取的特征表示~ fα2,并将差异损失重写为:

我们对标记数据和未标记数据都应用差异监督,因此我们将总差异损失计算为![]()
- 对于有标记图像
为了需要确保子网做出有意义的预测。因此,对于标记的数据,我们使用GT标签作为监督来训练两个子网以生成语义上有意义的预测,我们将监督损失公式化如下:

下标i表示第i个子网,并且我们使用n表示第m个图像中的第n个像素,因此~ ylmn和ylmn分别表示第m标记图像中第n个像素的预测或GT标记。注意,我们需要对这两个子网进行GT监督,因此我们可以将监督损失计算为![]()
- 对于无标记图像
采用伪标记方法使每个子网能够从另一个子网学习语义信息。给定一个预测 ,由其生成的伪标签可以被写为 yumn,i=
,由其生成的伪标签可以被写为 yumn,i=
,其中 是
是 的预测得分的第c维,i和c={1,…, Y}表示类别的索引。应用交叉熵损失来微调模型,每个分支的一致性损失可以公式化如下:
的预测得分的第c维,i和c={1,…, Y}表示类别的索引。应用交叉熵损失来微调模型,每个分支的一致性损失可以公式化如下:

总Loss:
CPL: 基于冲突的伪标记
使用我们的跨视图一致性(CVC)方法,两个子网将从不同的视图中学习语义信息。然而,训练可能是不稳定的,因为特征差异损失会在模型上引入太强的扰动。因此,很难保证两个子网能够相互学习有用的语义信息,这可能会进一步影响预测的可靠性。
Conflict-based pseudo-labeling
二进制值 来定义预测是否冲突,当
来定义预测是否冲突,当 时=1,反之为0
时=1,反之为0
根据之前设置置信阈值γ以确定预测是否可信的方法,将冲突预测进一步分为两类,即冲突和可信任(conflicting and confident,CC)预测, 冲突但不可信(conflicting but unconfident,CU)预测,并且只将更高的权重ωc分配给由CC预测生成的伪标签
CC预测为 ,当其=1时,表示
,当其=1时,表示
同理CU预测为 ,表示CU预测和无冲突预测的并集,且有
,表示CU预测和无冲突预测的并集,且有
仍然使用CU预测生成的伪标签来用正常权重微调模型,而不是直接丢弃它们,主要原因是我们认为这些CU预测也可以包含关于类间关系的潜在信息。
因此,我们可以将方程4重写为


![]()
在推理阶段,只需要网络的一个分支就可以产生预测,而且还需要注意,我们的方法与传统的数据增强方法无关,这意味着我们可以直接对输入数据采用任何数据增强方法,以增加输入的多样性,唯一需要确保的是两个子网的输入应该相同。
实验
设置
- Dataset: Pascal VOC 2012 dataset, Cityscapes dataset
- 分割模型:DeepLabv3, backbone:在ImageNet上预训练的ResNet
- lr:0.001/0.005,epoch:80/250,batch size:24/8
- wc:2.0;λ1、λ2、λ3:5.0,1.0,2.0/2.0,2.0,1.0;γ:0.9/0.0(?)
comparison with SOTA
在原始Pascal VOC 2012数据集上将我们的方法与其他方法进行了比较,结果见表1。
采用ResNet-101作为编码器的主干。
†表明提出的模型只训练了40个epoch,而其他模型则训练了80个epoch。
值得注意的是,当标记数据数量较少时,所提方法表现出了很好的性能,例如,当只有92个或183个标记数据时,所提方法比当前SOTA方法分别提高了2.2%和2.4%。
进一步验证了CCVC方法在渲染的Pascal VOC 2012数据集上的有效性,结果见表2。
本文报告了分别使用ResNet-50和ResNet-101作为编码器骨干的结果。
实验结果表明,CCVC方法在使用不同的骨干网时,也可以在所有分区协议下实现SOTA结果,特别是在1/16分区协议下,在使用ResNet-50和ResNet-101作为骨干网时,CCVC方法比目前的SOTA方法分别高出1.7%和1.7%,验证了所提方法的有效性。
从表中可以推断,我们的方法可以取得很好的性能,特别是在标记数据数量较少时,这表明我们的方法可以更好地利用未标记数据。
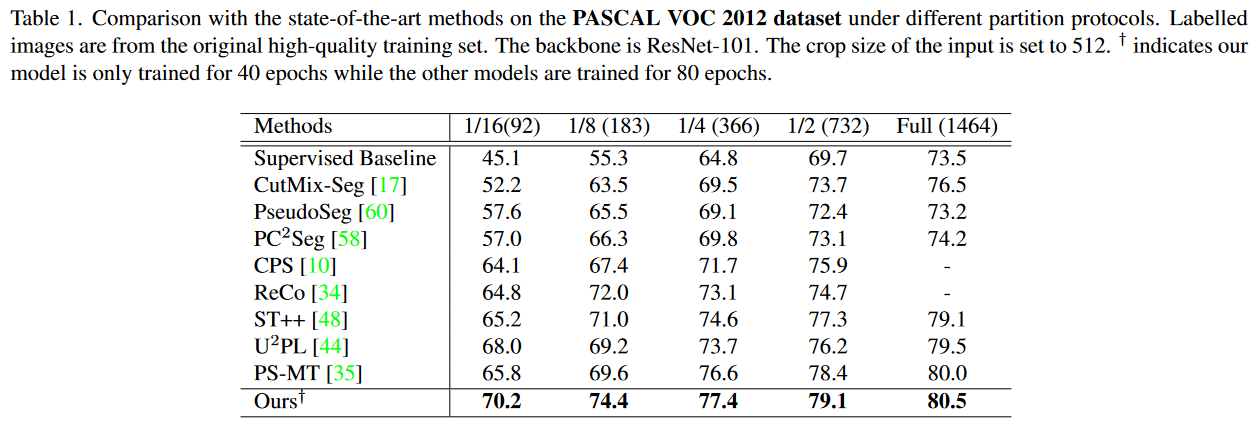
表1。在不同分区协议下,与PASCAL VOC 2012数据集上最先进的方法进行比较。带标签的图像来自原始的高质量训练集。主干是ResNet-101。输入的裁剪大小设置为512。†表明我们的模型只训练了40个时期,而其他模型训练了80个时期。
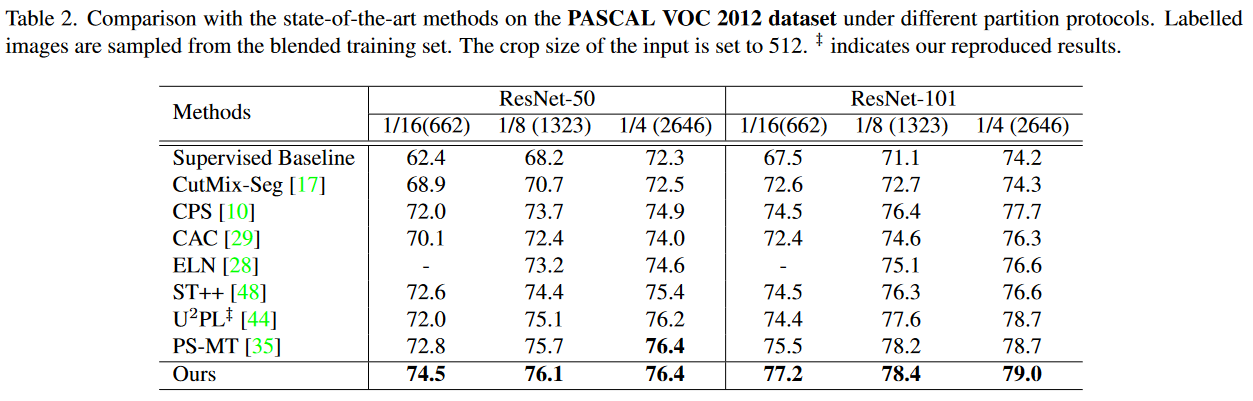
表2。在不同分区协议下,与PASCAL VOC 2012数据集上最先进的方法进行比较。标记的图像是从混合训练集中采样的。输入的裁剪大小设置为512, †表示我们复制的结果。

表3。在不同分区协议下,在Cityscapes数据集上与最先进的方法进行比较。主干是ResNet-50,输入的裁剪大小设置为712。*表示U2PL再现的结果。
Ablation
以ResNet-101作为DeepLabv3+的主干,在原始Pascal VOC 2012数据集上进行所有的消融实验,并将其划分为1/4
组件的有效性。CCVC方法包括CVC模块、CPL模块和数据增强(Aug)。请注意,我们的CVC方法中使用了三个损失,即监督损失Lsup、一致性损失Lcon和差异损失Ldis,以及一个额外的映射模块map。分析结果见表4。

表4。对我们的CCVC方法中不同成分的有效性进行消融研究,包括监督损失Lsup、一致性损失Lcon、差异损失Ldis、映射操作Ψ映射、基于冲突的伪标记(CPL)和数据扩充(Aug)策略。请注意,我们只训练40个epoch的模型。
Aug: 当我们使用ST++中列出的一些简单的强数据增强来增加输入数据的多样性时,我们的方法可以进一步增强,mIoU提高3.4%,
计算了在训练过程中每种方法的可靠预测的比例f以及响应的mIoU。可靠预测的阈值γ,设为0.9
CCR(交叉一致性正则化)方法比我们的CVC方法可以生成更自信的预测,而我们的CVC方法的性能比CCR方法更好,这表明CCR方法将比CVC方法生成更自信但不正确的预测

图3。监督基线的训练过程,交叉一致性正则化(CCR)方法和我们的CVC方法。可以看出,我们的方法不会输出很多高度自信的预测,但预测的准确性非常高,这表明我们的方法可以有效地减少确认偏差的影响。

表5。消融研究基于冲突的伪标记(CPL)方法的有效性。我们改变置信冲突(CC)预测的权重,即ωc,以验证模型将从冲突预测中学习更多的语义信息。请注意,我们只训练40个时期的模型。
- 结果质量可视化
如图4所示:监督基线(b)容易产生噪声预测,交叉一致性正则化方法(c)可能无法识别一些难以识别的部分,而我们的CVC方法(d)和CCVC方法(e)可以很容易地识别那些难以识别的像素,如履带自行车的后轮,甚至一些小物体。我们使用我们的CCVC方法进一步可视化训练期间的进化过程,以验证图中提出的基于冲突的伪标记(CPL)方法的有效性。
Fig5:观察到,在训练过程中,黄色框内的冲突预测逐渐变得一致,这表明了我们的CPL方法的有效性。

图4。我们的方法在1/4分区下从原始Pascal VOC 2012数据集获得的定性结果。(a) 输入图像,(b)监督基线的结果,(c)交叉一致性正则化(CCR)方法的结果。

图5。我们的方法在1/4分区下的原始Pascal VOC 2012数据集上的定性结果,其中我们使用ResNet-101作为DeepLabv3+的主干。(a) 输入图像和地面实况标签,(b)当对模型进行5个时期的训练时两个子网的预测结果,(c)当对该模型进行10个时期的培训时两个子网络的预测结果。我们可以观察到,我们的基于冲突的伪标记(CPL)方法可以防止两个子网做出不一致的预测,这保证了预测结果的可靠性。
总结
- Conclusion
在这项工作中,我们提出了一种基于协同训练框架的半监督语义分割方法,其中我们引入了一种跨视图一致性策略,迫使两个子网学习从不相关的视图推理相同的输入,然后相互交换信息以生成一致的预测。因此,我们的方法可以有效地减少崩溃,扩大对网络的感知,以产生更可靠的预测,并进一步减少确认偏差问题。在基准数据集上进行的大量实验验证了我们新提出的方法的有效性