一个不知名大学生,江湖人称菜狗
original author: Jacky Li
Email : [email protected]Time of completion:2023.12.31
Last edited: 2023.12.31祝自己生日快乐啦!!!!

目录
本次任务的仪表数据集存在以下难点:
1、仪表刻度存在遮挡、模糊等问题,影响OCR识别
2、仪表图像存在旋转、倾斜问题,影响读数测量
算法设计
算法分为4个流程,首先用yolov5s模型从原图中识别出仪,接着用yolov8x-pose模型检测出仪表中的刻度线、指针的关键点,再用DBNetpp模型检测出数值框并用SATRN模型进行文本识别,最后后处理得到读数结果。
(1)基于YOLOv5s的仪表检测
选型理由
Yolov5s网络小,速度快。虽然AP精度低,但检测的是仪表这种大目标是完全够用的。我们采用极市官方提供的yolov5s训练套件进行训练,上手简单,且仪表识别准确率达到了99.7%,效果满足实际需求。
(2)基于YOLOv8x-pose的指针和刻度关键点检测
选型理由
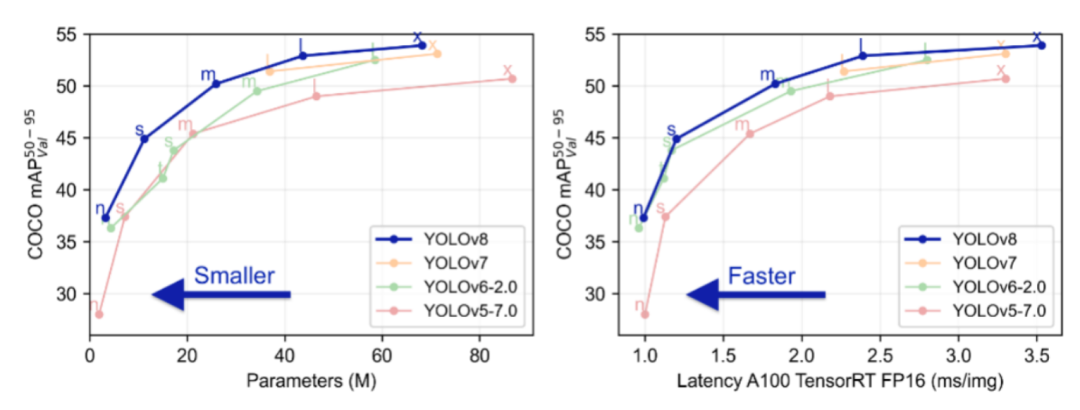
YOLOv8是YOLOv5团队ultralytics在今年开源的SOTA模型,引入了新的改进,进一步提升了性能和灵活性。YOLOv8 设计快速、准确且易于使用,使其成为目标检测、实例分割、图像分类和姿态估计任务的绝佳选择。
yolo-pose是估计人体姿态的一个模型,它将人体姿态分为17个关键点。
为了尽可能地提高关键点检测精度,我们使用了规模最大的YOLOv8x-pose模型。
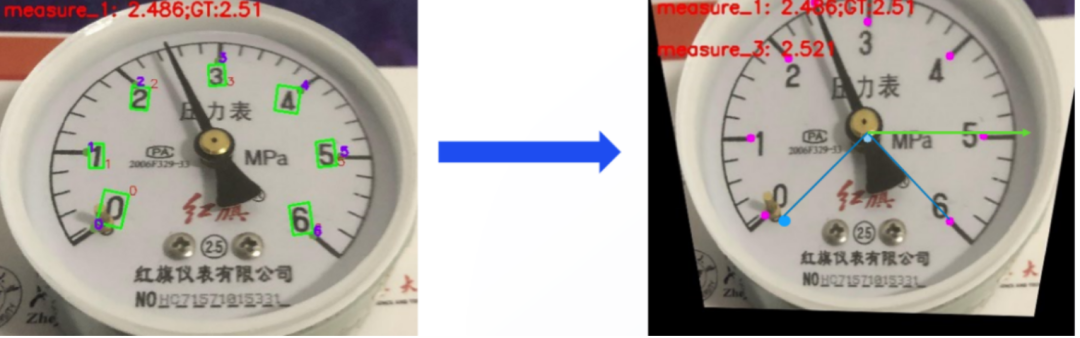
指针关键点数据集制作

我们将指针的两个点作为其关键点,由这两个点组成的矩形框作为目标检测框,如果两个点组成的矩形框太窄,进行适当延伸。
刻度关键点数据集制作
由于每个仪表的数值框个数不同,我们将每个数值框视为同一个类别进行目标检测,每个数值框携带对应的刻度点作为其关键点。
我们采用从官网下载的预训练模型在仪表数据集上微调,将关键点权重从12提高到20。
(3)基于DBNetpp的文本检测
选型理由
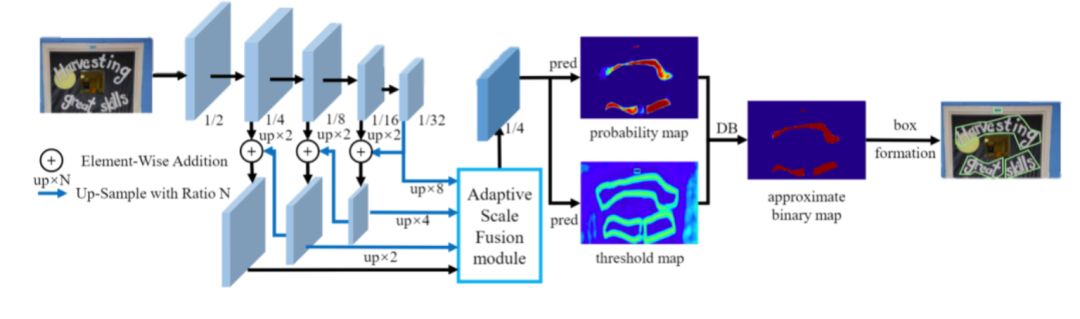
由于仪表尺寸大小不一,我们选用DBNetpp模型,它在DBNet模型基础上引入了多级特征聚合模块(Adaptive Scale Fusion, ASF),ASF模块由阶段注意力和空间注意力子模块构成,加强了不同尺度特征的融合,提高了处理不同尺寸图像的鲁棒性。
(4)基于SATRN模型的文本识别
选型理由
SATRN模型利用self-attention机制对字符的2D空间关系进行建模,并且在FFN模块中引入卷积层,增强了模型对全局和局部特征的捕捉能力。
SATRN模型对于大曲率弯曲、大角度旋转文本依然具备足够的识别能力,在多个不规则文本数据集上达到SOTA。
(5)读数识别
将上述模型的输出采用opencv进行后处理得到读数结果,具体流程如下:

-
区分内外径
-

根据刻度点和数值框距离指针原点的距离区分内径和外径,分别进行后续处理。
-
确定刻度点的顺序
起点到终点的角度差值是相邻两点间角度差值中最大的,我们只需要找到这个最大的角度差值,就可以确定起始点。
先将刻度点坐标转成以指针原点为中心的极坐标,根据角度从小到大排序 [16,0,4,8,12]
然后计算相邻刻度点两两间的角度差值,选择最大差值的下一个刻度点作为起点,调整顺序后 [0,4,8,12,16]
-
修正OCR识别结果
上图中由于指针遮挡,1500识别成500,通过等差数列对其进行修正。
-
透视变换
步骤:
1、确定最后一个点的坐标:已知最后一个点在透视变换后的极坐标角度为45°,假设所有刻度点距离圆心距离为R,则最后一个点的坐标可以表示为(45°,R)可以根据该极坐标得出笛卡尔坐标系下的坐标。
2、确定其他三个点的坐标:这里一共有6个间隔平分整个270°量程,所以每个刻度夹角为270/6=45°,据此可以依次计算出其他三个点在变换后的坐标。
通过这种方式,可以确定四个刻度点在透视变换后图像中的坐标,并用这些坐标来进行透视变换。
-
补充被指针遮挡的点
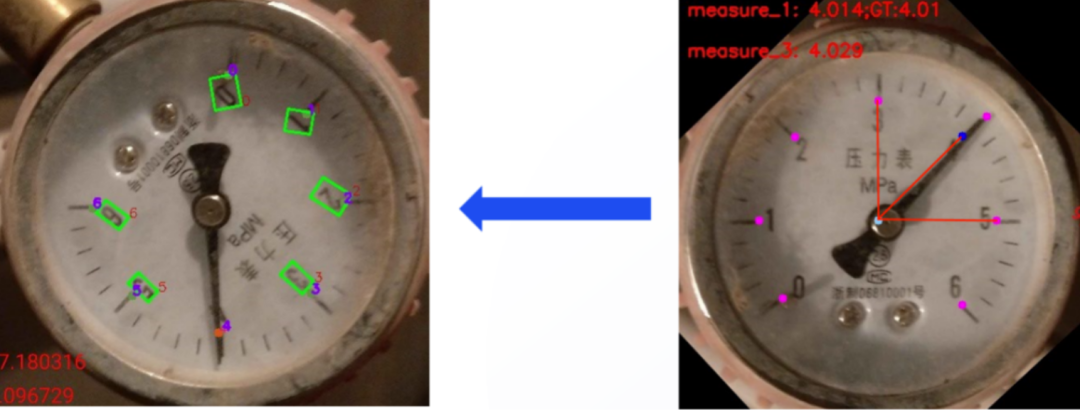
步骤:
1、首先,确定缺失点的前后点,以及它们与圆心的平均距离。这些信息将用于推算缺失点的极坐标。
2、根据前后点的角度和平均距离,计算出缺失点的极坐标。极坐标由极径和极角组成,极径表示点到圆心的距离,极角表示点在极坐标系中的角度。将缺失点的极坐标转换为笛卡尔坐标。
3、如果进行了透视变换,需要将转换后的坐标应用于透视矩阵,以获得原图中的坐标。
-
计算读数


算法优化
存在问题

边框遮挡导致的刻度数字无法识别,上述算法不能很好的处理。
改进方法
根据数据集分布,为内外径各建立一个list,以外径举例:
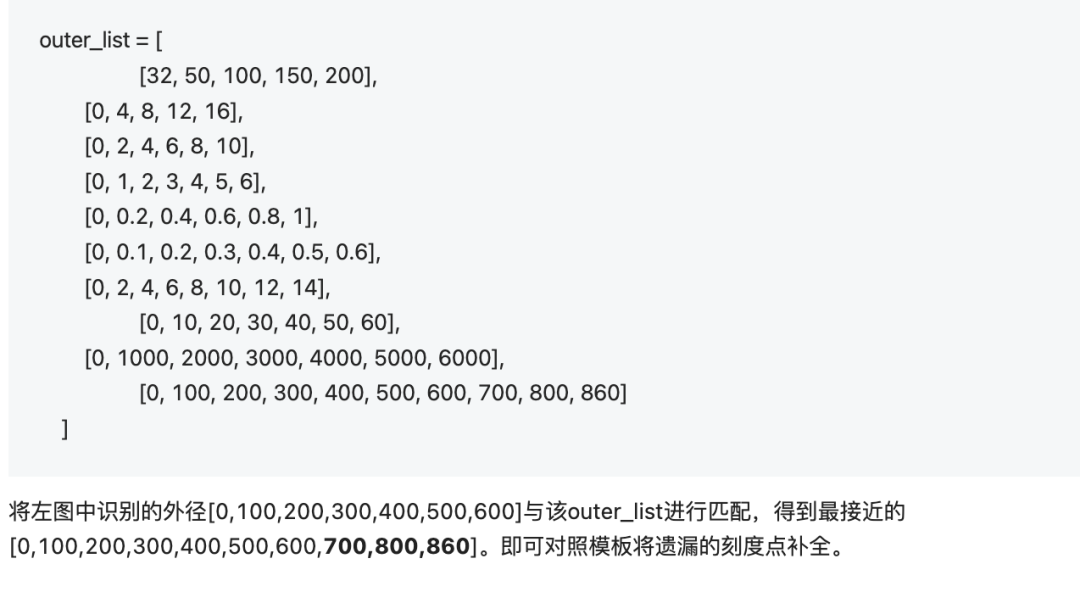
总结
优点:
1、目标检测算法和ocr识别算法均源自开源算法库中SOTA模型,实现简单高效,且具备丰富的工业部署落地支持。
2、没有采用传统直线检测的方式检测关键点,通过类似姿态估计的方式提高了关键点检测精度。
3、提出了一种基于查表的鲁棒仪表读数方法,对于遮挡严重的情况也能较好地处理。
4、通过透视变换,将形变的仪表图像修正,使得读数更加准确。
可提升点:
1、将模型文件转换为TensorRT格式,加速推理。
2、更改ocr识别模型,提升效率。