1.DQN
1.1概念
DQN相对于Q-Learning进行了三处改进:
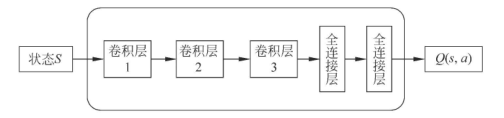
1.引入神经网络:如下图所示希望能从状态S中提取Q(s,a)
2.经验回放机制:连续动作空间采样时,前后数据具有强关联性,而神经网络训练时要求数据之间具有独立同分布特性,简单理解,就是前后输入的数据之间要有独立性,所以对于连续空间数据,采用随机采样法,
3.设置单独目标网络:下式中θ为权重参数,![]() 为目标网络,
为目标网络,![]() 为目标网络和当前网络的差值,利用该误差不断更新θ。
为目标网络和当前网络的差值,利用该误差不断更新θ。
![]()
1.2迭代过程
Q-Learning:只能解决有限维度和离散空间的任务,对于机器人控制这些高维连续空间的任务,力所不能及,之后用神经网络逼近Q(s,a;θ),也就是DQN。
DQN:值函数逼近,是逼近Q(s,a),最终目的也是得到最优Π(a|s),但又存在过优问题,所以出现了Double DQN。
Double DQN:用两个网络,如下公式所示,第一个先选择不同状态下,选择令Q(s,a)最大的动作a,然后再众多最大动作中,再由给该动作a,取一个合适的Q值,如果说
给的值也过高,那么令Q放弃该动作a,以此解决了过优问题。公式如下:
进一步人们开始思考,无论是DQN还是Double DQN,都没有考虑如何多关注贡献更大的a对应的Q,这更加符合人类学习的过程,所以引入了优势函数。
Dueling DQN:此处引入了优势函数的概念,举个例子,当我们在高速开车时,前后无车时,我们只关注状态价值V(s)即可,但遇到车时,就必须关注相应动作的价值函数值,而不同的动作对结果影响会有优劣之分,这就是动作优势。
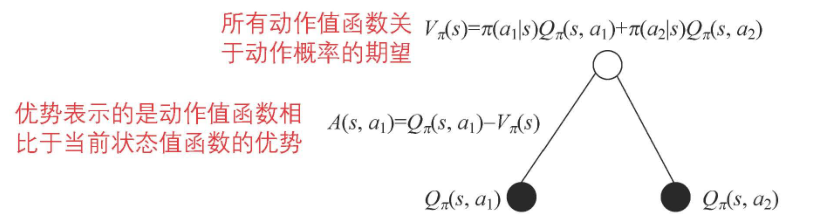
我们都知道,状态价值函数V(s)是动作价值函数Q(s,a)的加权结果,如下图所示,在s状态下有和
两个动作值函数,加权成
,分别能得到优势函数,
和
。
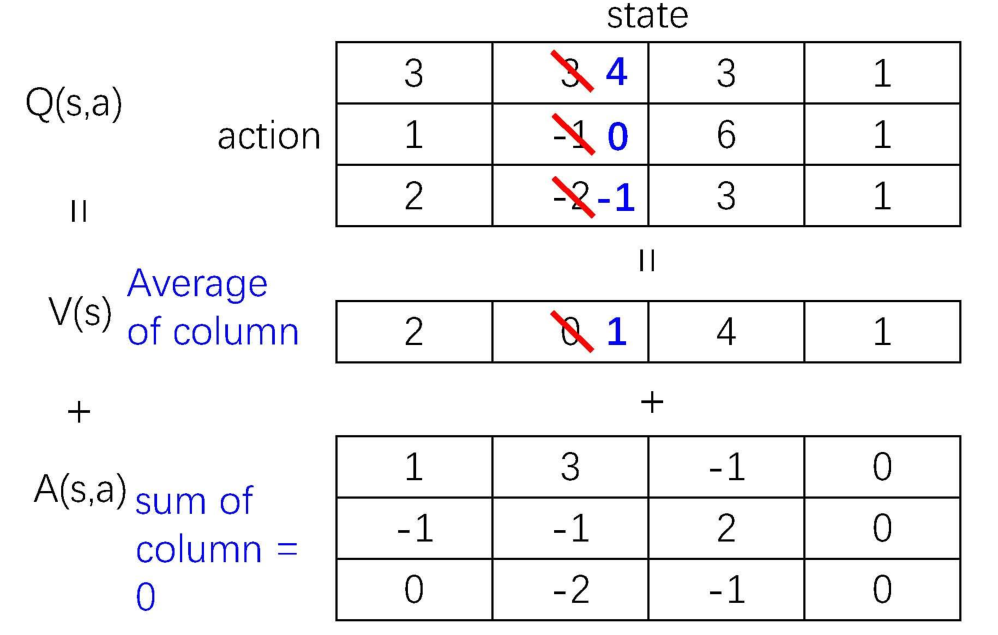
如下图所示,在进行网络训练时,DQN和Double DQN得到的是Q(s,a),而Dueling DQN得到两个网络V(s)和A(s,a),最终叠加得到Q(s,a)。

进一步看下图,V(s)按照Q(s,a)的平均值计算得到,然后不同的Q(s,a)-V(s)是得到不同的优势函数A(s,a)。