TORCHVISION 官网地址:torchvision — Torchvision 0.12 documentation
计算机视觉是深度学习中最重要的一类应用,为了方便研究者使用,PyTorch团队专门开发了一个视觉工具包torchvion,这个包独立于PyTorch,需通过pip instal torchvision安装。在之前的例子中我们已经见识到了它的部分功能,这里再做一个系统性的介绍。torchvision它是一个视觉工具包,提供了很多视觉图像处理的工具,主要包含三部分:
- datasets: 提供常用的数据集加载,设计上都是继承
torhc.utils.data.Dataset,主要包括MNIST、CIFAR10/100、ImageNet、COCO等。 - models:提供深度学习中各种经典网络的网络结构以及预训练好的模型,包括
AlexNet、VGG系列、ResNet系列、Inception系列等。 - transforms:提供常用的数据预处理操作,主要包括对Tensor以及PIL Image对象的操作。
- utils:用于把形似 (3 x H x W) 的张量保存到硬盘中,给一个mini-batch的图像可以产生一个图像格网。
1、datasets
torchvision.datasets 是用来进行数据加载的,Torchvision 在 torchvision.datasets 模块中提供了许多内置数据集,以及用于构建您自己的数据集的实用程序类。
内置数据集:所有数据集都是 torch.utils.data.Dataset 的子类,即它们实现了 __getitem__ 和 __len__ 方法。 因此,它们都可以传递给 torch.utils.data.DataLoader,它可以使用 torch.multiprocessing 工作线程并行加载多个样本。 内置数据集包含图像分类(Caltech 101物体分类 、CelebA人脸分类、CIFAR10 物体汽车分类、MNIST 手写数据分类、LFW人脸验证、ImageNet图像分类等等),图像检测与分割(Cityscapes Dataset、Pascal VOC Segmentation Dataset),以及光流法Optical Flow数据集、视频分类数据集等等。
例如:
imagenet_data = torchvision.datasets.ImageNet('path/to/imagenet_root/')
data_loader = torch.utils.data.DataLoader(imagenet_data,
batch_size=4,
shuffle=True,
num_workers=args.nThreads)import os
from PIL import Image
import numpy as np
from torchvision import transforms as T
from torchvision import datasets
from torch.utils.data import DataLoader
normalize = T.Normalize(mean=3, std=0.2)
transform = T.Compose([
#T.RandomResizedCrop(224),
#T.RandomHorizontalFlip(),
T.ToTensor(),
normalize,
])
# 指定数据集路径为data,如果数据集不存在则进行下载
# 通过train=False获取测试集
dataset = datasets.MNIST('data/', download=True, train=False, transform=transform)
dataloader = DataLoader(dataset, shuffle=True, batch_size=16)
from torchvision.utils import make_grid, save_image
dataiter = iter(dataloader)
img = make_grid(next(dataiter)[0], 4) # 拼成4*4网格图片,且会转成3通道
to_img = T.ToPILImage()
to_img(img)
save_image(img, 'a.png')
Image.open('a.png')自定义datasets类的基类:
| DatasetFolder(root, loader, Any], …) |
A generic data loader.通用数据加载 |
| ImageFolder(root, transform, …) |
A generic data loader where the images are arranged in this way by default: .通用图像数据加载 |
| VisionDataset(root, transforms, transform, …) |
Base Class For making datasets which are compatible with torchvision. |
2、models
torchvision.models 包含用于解决不同任务的模型定义,包括:图像分类、像素语义分割、对象检测、实例分割、人物关键点检测、视频分类和光流。
其中包含如下模型:
-
Inception v3
-
ShuffleNet v2
通过如下方法构造:
import torchvision.models as models
resnet18 = models.resnet18()
alexnet = models.alexnet()
vgg16 = models.vgg16()
squeezenet = models.squeezenet1_0()
convnext_tiny = models.convnext_tiny()
convnext_small = models.convnext_small()我们使用 PyTorch torch.utils.model_zoo 提供预训练模型。 这些可以通过传递 pretrained=True 来构造:
import torchvision.models as models
resnet18 = models.resnet18(pretrained=True)
alexnet = models.alexnet(pretrained=True)
squeezenet = models.squeezenet1_0(pretrained=True)
vgg16 = models.vgg16(pretrained=True)
densenet = models.densenet161(pretrained=True)
inception = models.inception_v3(pretrained=True)The process for obtaining the values of mean and std is roughly equivalent to:
import torch
from torchvision import datasets, transforms as T
transform = T.Compose([T.Resize(256), T.CenterCrop(224), T.ToTensor()])
dataset = datasets.ImageNet(".", split="train", transform=transform)
means = []
stds = []
for img in subset(dataset):
means.append(torch.mean(img))
stds.append(torch.std(img))
mean = torch.mean(torch.tensor(means))
std = torch.mean(torch.tensor(stds))以下架构为 INT8 量化模型提供支持。 您可以通过调用其构造函数来获得具有随机权重的模型:
googlenet = models.quantization.googlenet()
inception_v3 = models.quantization.inception_v3()
mobilenet_v2 = models.quantization.mobilenet_v2()
mobilenet_v3_large = models.quantization.mobilenet_v3_large()
resnet18 = models.quantization.resnet18()
resnet50 = models.quantization.resnet50()只需几行代码即可获得预训练的量化模型:
import torchvision.models as models
model = models.quantization.mobilenet_v2(pretrained=True, quantize=True)
model.eval()
# run the model with quantized inputs and weights
out = model(torch.rand(1, 3, 224, 224))语义分割
模型包包含以下语义分割模型架构的定义:
目标检测、实例分割和人物关键点检测
模型包包含以下用于检测的模型架构的定义:
3、transforms
其中transforms模块提供了对PIL Image对象和Tensor对象的常用操作。张量图像是具有 (C, H, W) 形状的张量,其中 C 是通道数,H 和 W 是图像的高度和宽度。 A batch of Tensor Images 是一个 (B, C, H, W) 形状的张量,其中 B 是 batch 中的图像数量。
对PIL Image的操作包括:
Scale:调整图片尺寸,长宽比保持不变CenterCrop、RandomCrop、RandomResizedCrop: 裁剪图片Pad:填充ToTensor:将PIL Image对象转成Tensor,会自动将[0, 255]归一化至[0, 1]
对Tensor的操作包括:
- Normalize:标准化,即减均值,除以标准差
- ToPILImage:将Tensor转为PIL Image对象
如果要对图片进行多个操作,可通过Compose函数将这些操作拼接起来,类似于nn.Sequential。注意,这些操作定义后是以函数的形式存在,真正使用时需调用它的__call__方法,这点类似于nn.Module。例如要将图片调整为224×224,首先应构建这个操作trans = Resize((224, 224)),然后调用trans(img)。下面我们就用transforms的这些操作来优化上面实现的dataset。
官方用例子解释了transforms具体的用法:
1、Illustration of transforms


4、utils
The torchvision.utils module contains various utilities, mostly for vizualization.
| draw_bounding_boxes(image, boxes[, labels, …]) |
Draws bounding boxes on given image. |
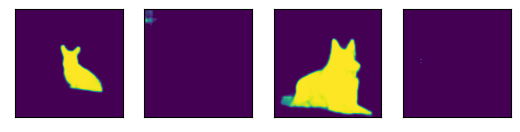
| draw_segmentation_masks(image, masks[, …]) |
Draws segmentation masks on given RGB image. |
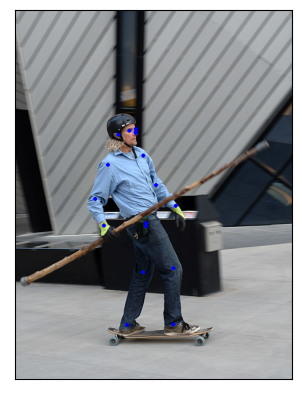
| draw_keypoints(image, keypoints[, …]) |
Draws Keypoints on given RGB image. |
| flow_to_image(flow) |
Converts a flow to an RGB image. |
| make_grid(tensor[, nrow, padding, …]) |
Make a grid of images. |
| save_image(tensor, fp[, format]) |
Save a given Tensor into an image file. |
此示例说明了 torchvision 提供的用于可视化图像、边界框、分割掩码和关键点的一些实用程序。
代码例子地址:Visualization utilities — Torchvision 0.12 documentation



边界框代码
from torchvision.utils import draw_bounding_boxes
boxes = torch.tensor([[50, 50, 100, 200], [210, 150, 350, 430]], dtype=torch.float)
colors = ["blue", "yellow"]
result = draw_bounding_boxes(dog1_int, boxes, colors=colors, width=5)
show(result)5、READING/WRITING IMAGES AND VIDEOS
torchvision.io 包提供了执行 IO 操作的函数。 它们目前专门用于读取和写入视频和图像。
Video
| read_video(filename[, start_pts, end_pts, …]) |
Reads a video from a file, returning both the video frames as well as the audio frames |
| read_video_timestamps(filename[, pts_unit]) |
List the video frames timestamps. |
| write_video(filename, video_array, fps[, …]) |
Writes a 4d tensor in [T, H, W, C] format in a video file |
Image
| ImageReadMode(value) |
Support for various modes while reading images. |
| read_image(path[, mode]) |
Reads a JPEG or PNG image into a 3 dimensional RGB or grayscale Tensor. |
| decode_image(input[, mode]) |
Detects whether an image is a JPEG or PNG and performs the appropriate operation to decode the image into a 3 dimensional RGB or grayscale Tensor. |
| encode_jpeg(input[, quality]) |
Takes an input tensor in CHW layout and returns a buffer with the contents of its corresponding JPEG file. |
| decode_jpeg(input[, mode, device]) |
Decodes a JPEG image into a 3 dimensional RGB or grayscale Tensor. |
| write_jpeg(input, filename[, quality]) |
Takes an input tensor in CHW layout and saves it in a JPEG file. |
| encode_png(input[, compression_level]) |
Takes an input tensor in CHW layout and returns a buffer with the contents of its corresponding PNG file. |
| decode_png(input[, mode]) |
Decodes a PNG image into a 3 dimensional RGB or grayscale Tensor. |
| write_png(input, filename[, compression_level]) |
Takes an input tensor in CHW layout (or HW in the case of grayscale images) and saves it in a PNG file. |
| read_file(path) |
Reads and outputs the bytes contents of a file as a uint8 Tensor with one dimension. |
| write_file(filename, data) |
Writes the contents of a uint8 tensor with one dimension to a file. |