图
大部分定义都在离散数学II中学过了,所以对于已知或常见的我不多赘述
- 弧或边带权的图分别称作有向网或无向网。
- 若边或弧的个数 e < n l o g n e<nlogn e<nlogn,则称作稀疏图,否则称作稠密图。
- 对有向图,
若任意两个顶点之间都存在一条有向路径任意2个点是相互可达的才是强连通分量 ,则称此有向图为强连通图。 - 对无向图,任意2个点有路径(连通)即可
存储结构
邻接矩阵:
typedef struct {
char* vexs[MAX_VERTEX_NUM]; // 顶点列表,每个元素为一个字符串,代表一个顶点
ArcCell arcs[MAX_VERTEX_NUM][MAX_VERTEX_NUM]; // 邻接矩阵,二维数组表示从一个顶点到另一个顶点的弧,每个弧存储了该弧的相关信息
int vexnum; // 顶点个数
int arcnum; // 弧个数
GraphKind kind; // 图的类型
} MGraph;
邻接表:
typedef struct ArcNode {
int adjvex; // 该弧所指向的顶点的位置
struct ArcNode* nextarc; // 指向下一条弧的指针
char* info; // 该弧相关信息的指针
} ArcNode;//弧的结构
typedef struct VNode {
char* data; // 顶点信息
ArcNode* firstarc; // 指向第一条依附该顶点的弧
} VNode, AdjList[MAX_VERTEX_NUM];
十字链表
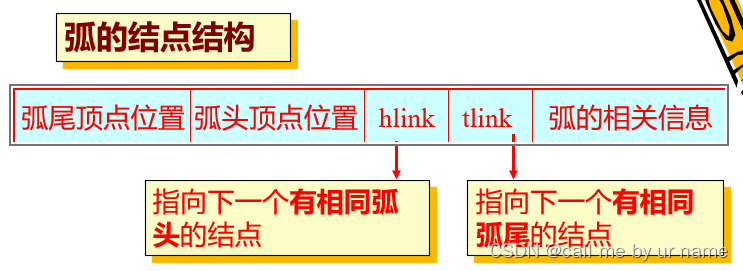
<v,w>表示从 v 到 w 的一条弧,并称 v 为弧尾,w 为弧头。
遍历
深度优先搜索dfs(这个比较熟了,不过多赘述)
一种非递归写法:
void DFS(Graph G, int v) {
int w;
InitStack(&S); // 初始化栈S
Push(&S, v);
visited[v] = TRUE; // 标记起点v已访问
while (!StackEmpty(S)) {
Pop(&S, &v); // 取出栈顶元素v
Visit(v); // 访问v
w = FirstAdjVex(G, v); // 求v的第一个邻接点w
while (w >= 0) {
if (!visited[w]) {
// w为v的尚未访问的邻接顶点
Push(&S, w); // 将w入栈
visited[w] = TRUE; // 标记w为已访问
}
w = NextAdjVex(G, v, w); // 求v相对于w的下一个邻接点
} // end while
} // end while
}
广度优先搜索bfs(类似 ‘树’ 那章的层次遍历)
void BFSTraverse(Graph G, Status(*Visit)(int)) {
int v, w;
Status status; // 初始化一个状态变量
Queue Q; // 定义辅助队列Q
for (v = 0; v < G.vexnum; ++v)
visited[v] = FALSE; // 初始化访问标志
InitQueue(&Q); // 置空的辅助队列Q
for (v = 0; v < G.vexnum; ++v) {
if (!visited[v]) {
// v尚未访问
visited[v] = TRUE; // 标记v为已访问
status = Visit(v); // 访问v
if (status == ERROR) return; // 如果访问失败,则返回错误
EnQueue(&Q, v); // 将v入队列
while (!QueueEmpty(Q)) {
// 队列不为空时执行循环
DeQueue(&Q, &u); // 队头元素出队并置为u
for (w = FirstAdjVex(G, u); w >= 0; w = NextAdjVex(G, u, w)) {
if (!visited[w]) {
// w为u的尚未访问的邻接顶点
visited[w] = TRUE; // 标记w为已访问
status = Visit(w); // 访问w
if (status == ERROR) return; // 如果访问失败,则返回错误
EnQueue(&Q, w); // 将w入队列
} // if
} // for
} // while
}
}
}
for (w = FirstAdjVex(G, u); w >= 0; w = NextAdjVex(G, u, w)) 这一条代码仔细看看
最小生成树
-
生成树:
是一个极小连通子图,它含有图中全部顶点,但只有 n-1 条边。 -
最小生成树:
如果无向连通图是一个带权图,那么它的所有生成树中必有一棵边的权值总和为最小的生成树,称这棵生成树为最小代价生成树,简称最小生成树。
K r u s k a l Kruskal Kruskal算法特点:将边归并,适于求稀疏网的最小生成树。
P r i m e Prime Prime算法特点:将顶点归并,与边数无关,适于稠密网。
普里姆算法
在生成树的构造过程中,图中 n 个顶点分属两个集合:已落在生成树上的顶点集 U 和尚未落在生成树上的顶点集 V-U ,则应在所有连通 U 中顶点和 V-U 中顶点的边中选取权值最小的边。
设置一个辅助数组 closedge,对当前 V-U 集中的每个顶点,在辅助数组中存在一个相应分量 closedge[i-1],它包括两个域,其中 lowcost 存储该边上的权。对每个顶点 vi ∈ V-U,有如下公式成立:
closedge[i-1].lowcost = Min { cost(u, v) | u ∈ U }
其中 cost(u, v) 表示边 (u, v) 的权值。显然,lowcost 记录的是当前该节点与已选择的节点中权值最小的边的权值。
struct {
VertexType adjvex; // U集中的顶点序号
VRType lowcost; // 边的权值
} closedge[MAX_VERTEX_NUM];
算法
void MiniSpanTree_P(MGraph G, VertexType u) {
int i, j, k;
k = LocateVex(G, u);
for (j = 0; j < G.vexnum; ++j) {
if (j != k) {
closedge[j].adjvex = u;
closedge[j].lowcost = G.arcs[k][j].adj;
}
}
closedge[k].lowcost = 0;
for (i = 1; i < G.vexnum; ++i) {
k = minimum(closedge); // 求出加入生成树的下一个顶点(k)
printf("(%d, %d) ", closedge[k].adjvex, G.vexs[k]); // 输出生成树上一条边
closedge[k].lowcost = 0; // 第k顶点并入U集
for (j = 0; j < G.vexnum; ++j) {
// 修改其它顶点的最小边
if (G.arcs[k][j].adj < closedge[j].lowcost) {
closedge[j].adjvex = G.vexs[k];
closedge[j].lowcost = G.arcs[k][j].adj;
}
}
}
}
k = minimum(closedge);
if (G.arcs[k][j].adj < closedge[j].lowcost) { closedge[j].adjvex = G.vexs[k]; closedge[j].lowcost = G.arcs[k][j].adj; }
这2条代码值得看看
时间复杂度是 O ( n 2 ) O(n^2) O(n2)
克鲁斯卡尔算法
-
构造只含
n个顶点的子图SG。 -
从权值最小的边开始,如果添加这条边不会在
SG中产生回路,则在SG上加上这条边。 -
重复以上步骤,直至
SG上加上n-1条边为止。 -
再次重复以上步骤,构造另一个最小生成树。
具体参考
时间复杂度 O ( e l o g e ) O(eloge) O(eloge)
拓扑排序、关键路径
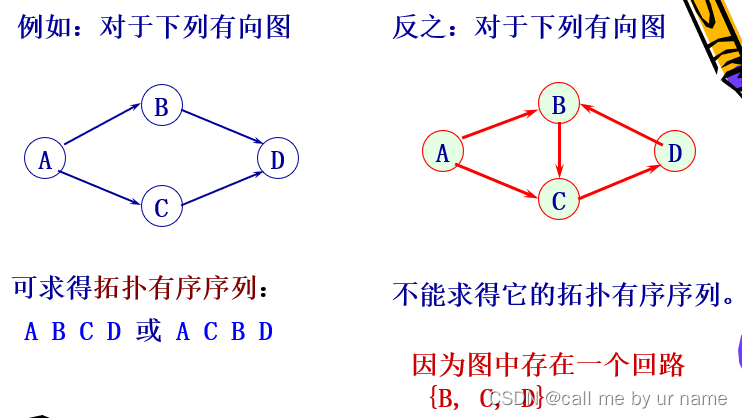
拓扑排序
适用于有向无环图
拓扑排序是一种特殊的排序方式,它基于有向图中各个节点之间的依赖关系,通过一系列的操作得到拓扑有序序列。具体实现方式是:按照有向图给出的次序关系,将图中顶点排成一个线性序列,对于有向图中没有限定次序关系的顶点,则可以人为加上任意的次序关系。由此所得顶点的线性序列称之为拓扑有序序列。
拓扑排序的实现步骤如下:
- 从有向图中选取一个没有前驱的顶点,并输出之;
- 从有向图中删除此顶点以及所有以它为尾的弧;
- 重复步骤 1 和 2,直至图为空,或者图不空但找不到无前驱的顶点为止。后一种情况说明有向图中存在环。
关键路径
在关键路径的分析中,我们需要计算每个事件(顶点)的最早发生时间和最迟发生时间:
-
事件(顶点)的最早发生时间 v e ( j ) ve(j) ve(j) 等于从源点到顶点 V j Vj Vj 的最长路径长度;
这个时间决定了所有以 V j Vj Vj 为尾的弧所表示的活动的最早开始时间。 -
事件(顶点)的最迟发生时间 v l ( k ) vl(k) vl(k) 表示在不推迟整个工程完成的前提下,事件最迟发生的时间;
v l ( k ) vl(k) vl(k) 等于工程完成时间减去从顶点 V k Vk Vk 到汇点的最长路径长度。
在关键路径分析中,计算事件发生时间的公式如下(汇点可以理解为最后一个点):
事件发生时间的计算公式:
- ve(源点) = 0;
- ve(k) = Max {ve(j) + dut(<j, k>)}
其中,dut(<j,k>) 表示从顶点 j 到顶点 k 的活动所需的时间或耗费。
- vl(汇点) = ve(汇点);
- vl(j) = Min {vl(k) - dut(<j, k>)}
其中,vl(j) 表示从顶点 j 开始到工程结束所能容忍的最大延迟时间。
在关键路径分析中,求解最早发生时间 ve 和最迟发生时间 vl 的顺序如下:
-
求 v e ve ve 顺序:按拓扑有序的次序,从源点开始,依次计算每个顶点的最早发生时间。
-
求 v l vl vl 顺序:按拓扑逆序的次序,从汇点开始,依次计算每个顶点的最迟发生时间。
最短路径
-
单源最短路径算法 - Dijkstra(迪杰斯特拉)算法:
该算法可以求解从源点到其它所有顶点的最短路径,但要求图中不存在负权边。 -
所有顶点间的最短路径算法 - Floyd(弗洛伊德)算法:
该算法可以求解图中任意两个顶点之间的最短路径,可以处理带有负权边的图。
在图论中,最短路径和最短路径长度的概念如下:
-
对于一个无权图,从一个结点到另一个结点可能存在多条路径,路径长度最短的那条路径称为最短路径。其长度称为最短路径长度。
-
对于一个带权图,从一个结点到另一个结点可能存在多条路径,带权路径长度最短的那条路径称为最短路径。其带权路径长度称为最短路径长度。
习题
图的连通分量
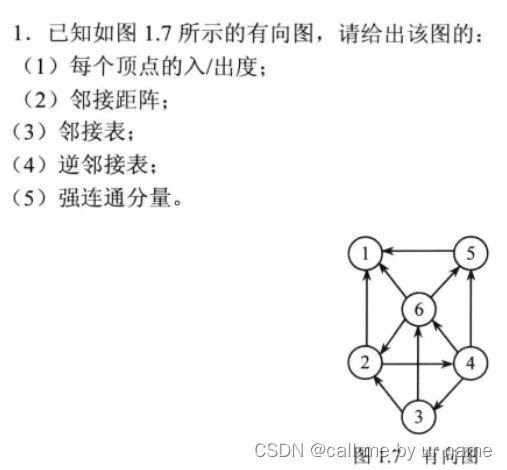
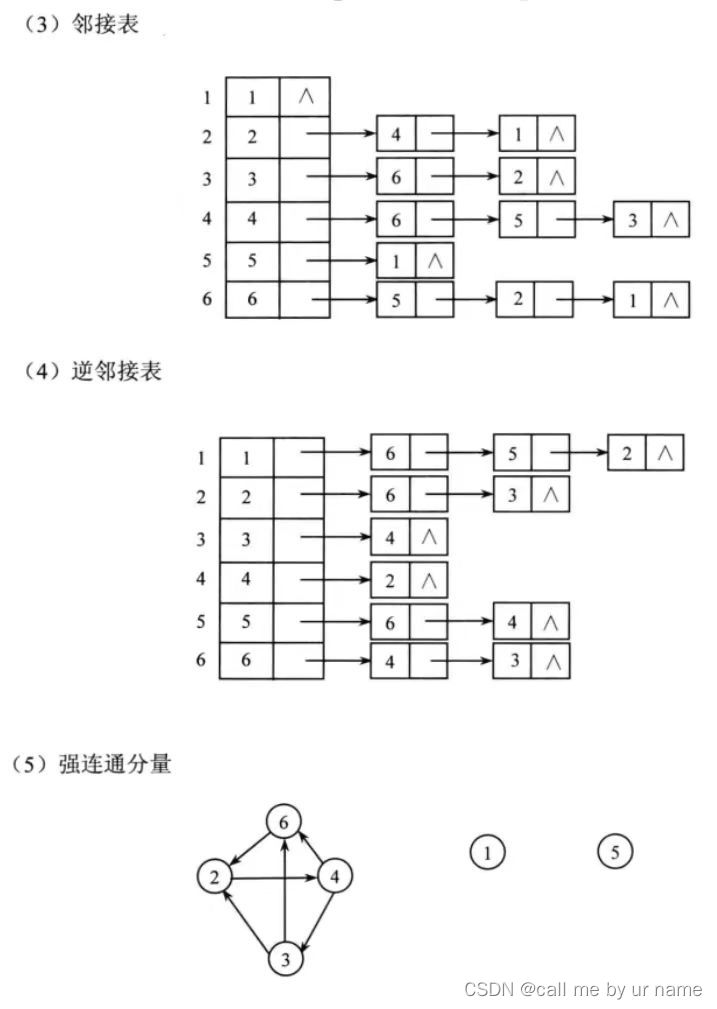
主要是 3 3 3和 5 5 5
关键路径
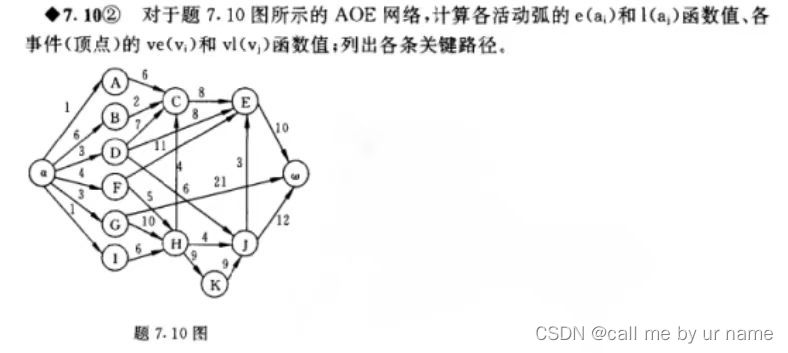
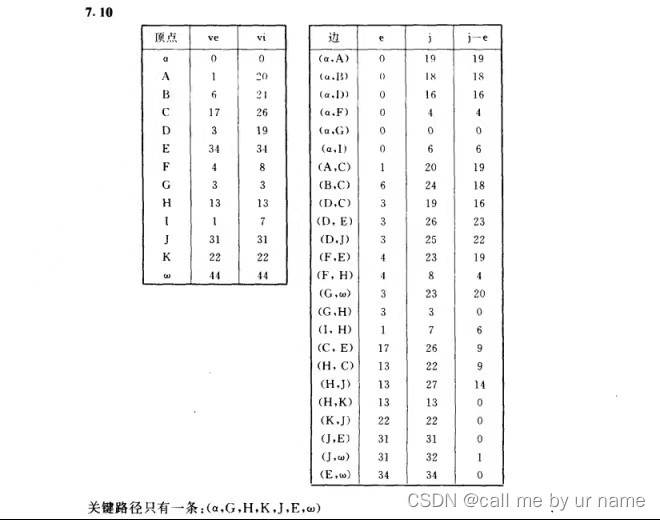
关键路径—— v e ve ve和 v l vl vl相同的点在关键路径上
Dijkstra算法
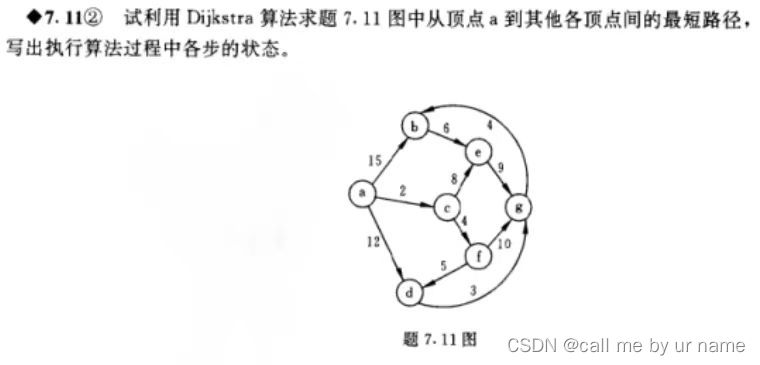
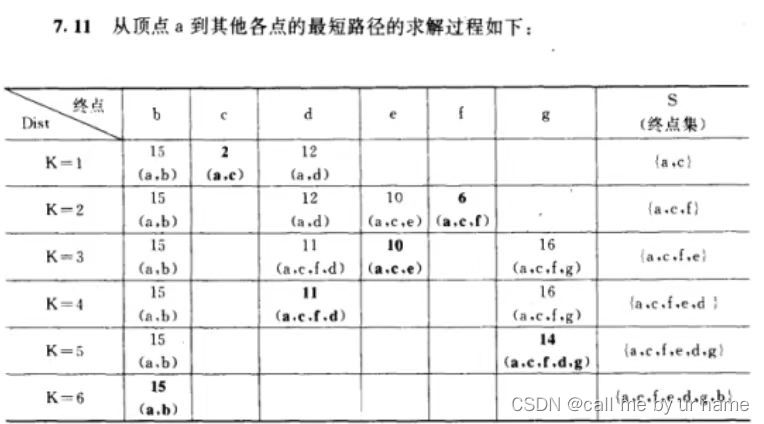
大概看看就行了,比较简单
深度优先搜索、邻接表是否存在路径
试基于图的深度优先搜索策略写一算法,判别以邻接表方式存储的有向图中是否存在由顶点 v i v_i vi到顶点 v j v_j vj的路径( i ≠ j i≠j i=j)注意:算法中涉及的图的基本操作必须在此存储结构上实现。
#define MAX 100
typedef struct Arc {
int vex;
struct Arc *next;
int info;
} Arc;
typedef struct Vertex {
int info;
Arc *first;
} Vertex;
Vertex vertex[MAX]; // 图的顶点集合,最多储存 MAX 个顶点
int visited[MAX]; // 记录每个顶点是否被访问过
int DFS(int i, int j) {
// 从第 i 个顶点开始,寻找是否有一条路径连接到第 j 个顶点
Arc* p;
if(i == j) return 1; // 如果 i 和 j 相同,返回 1 表示有路径连接
else {
visited[i] = 1; // 标记 i 为已访问
for(p = vertex[i].first; p != NULL; p = p->next) {
// 遍历顶点 i 的所有邻居
int k = p->vex; // 取出邻居的编号
if(!visited[k] && DFS(k, j)) return 1; // 如果邻居没有被访问过且与 j 有路径连接,返回 1
}
return 0; // 没有找到从 i 到 j 的路径,返回 0
}
}
还是有点小难理解,光看这个邻接表的数据结构代码,自己画图辅助理解一下吧
仍然上一题的要求、但是广搜
#define MAX 100
typedef struct Arc {
int vex;
struct Arc *next;
int info;
} Arc;
typedef struct Vertex {
int info;
Arc *first;
} Vertex;
Vertex vertex[MAX]; // 图的顶点集合,最多储存 MAX 个顶点
bool visited[MAX]; // 记录每个顶点是否被访问过
int BFS(int i, int j) {
Arc* p;
Queue Q;
initQueue(&Q);
visited[i] = 1;
enQueue(&Q, i);
while(!isEmpty(Q)) {
int cur = deQueue(&Q);
if(cur == j) return 1;
for(p = vertex[cur].first; p != NULL; p = p->next) {
int k = p->vex;
if(!visited[k]) {
visited[k] = 1;
enQueue(&Q, k);
}
}
}
return 0;
}
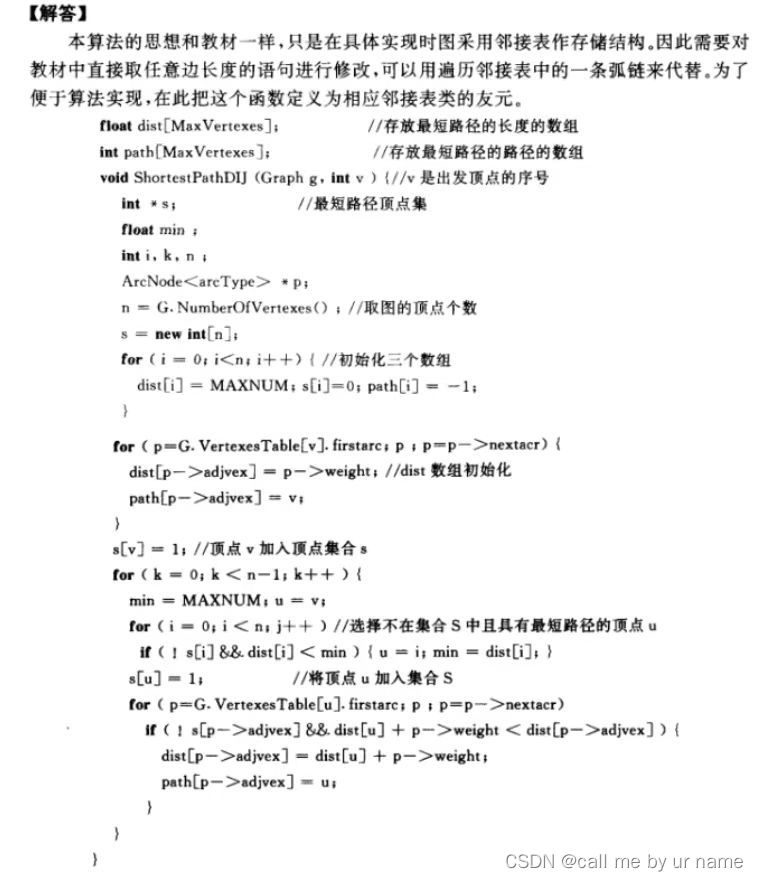
基于邻接表存储结构的Dijkstra算法