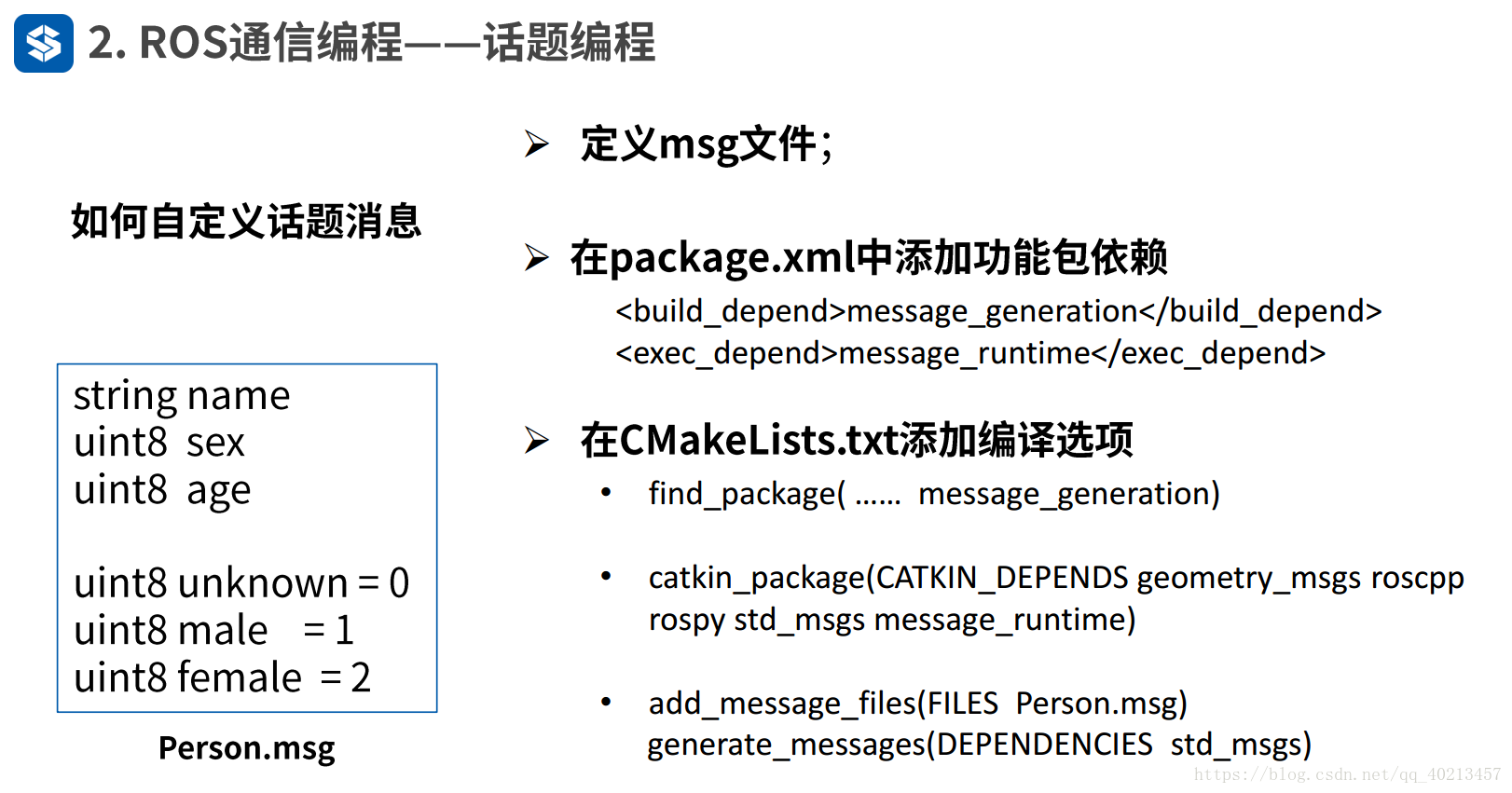
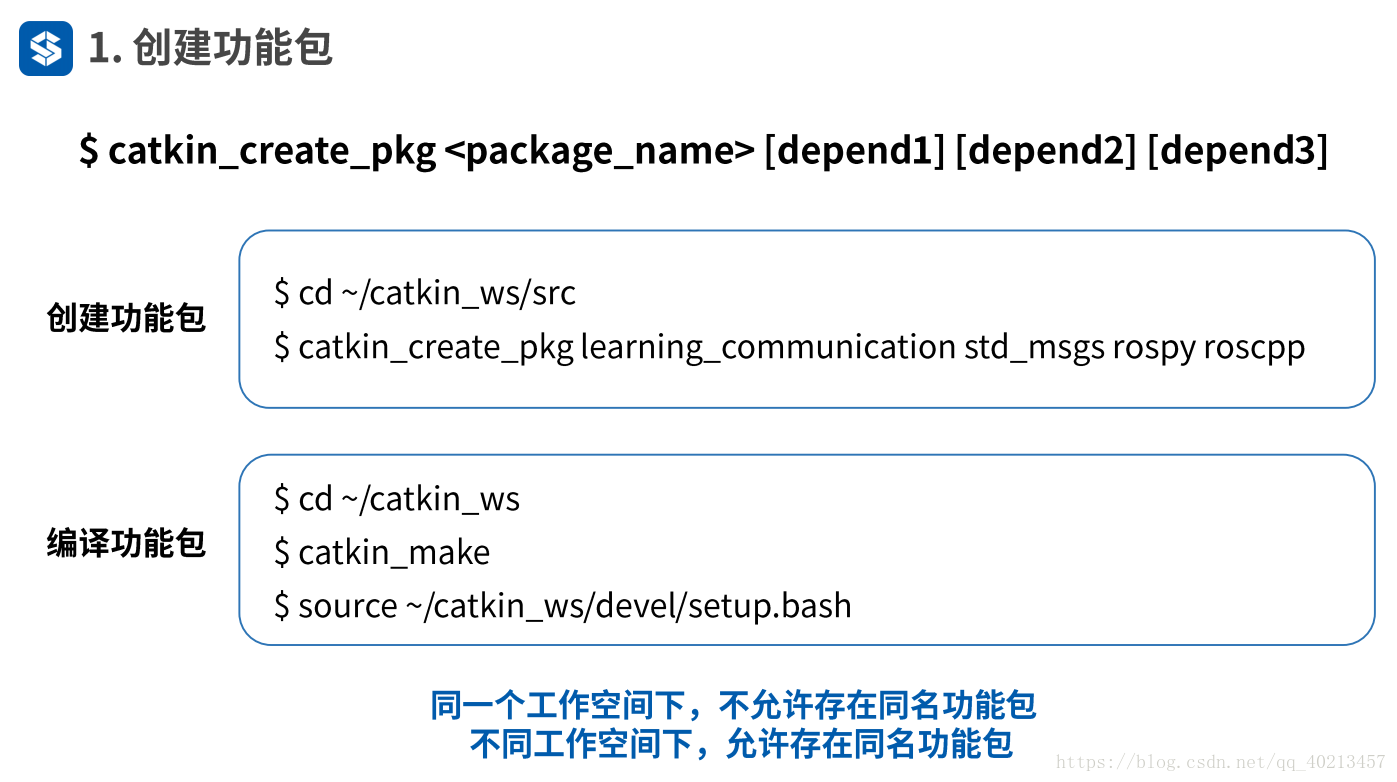
depend依赖 std_msgs标准的数据结构 rospy pyrhon接口 roscpp C++接口
env | grep ros 和ros有关的所有环境变量
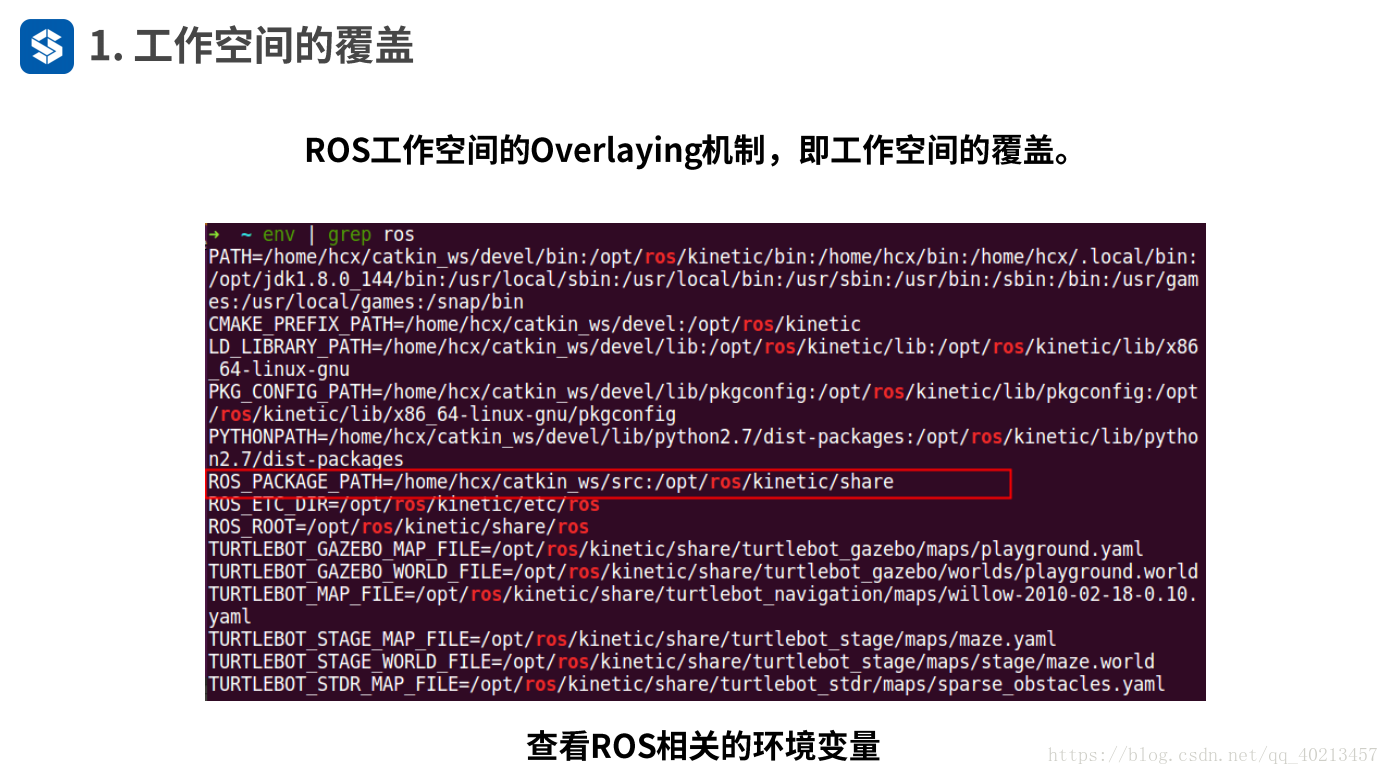
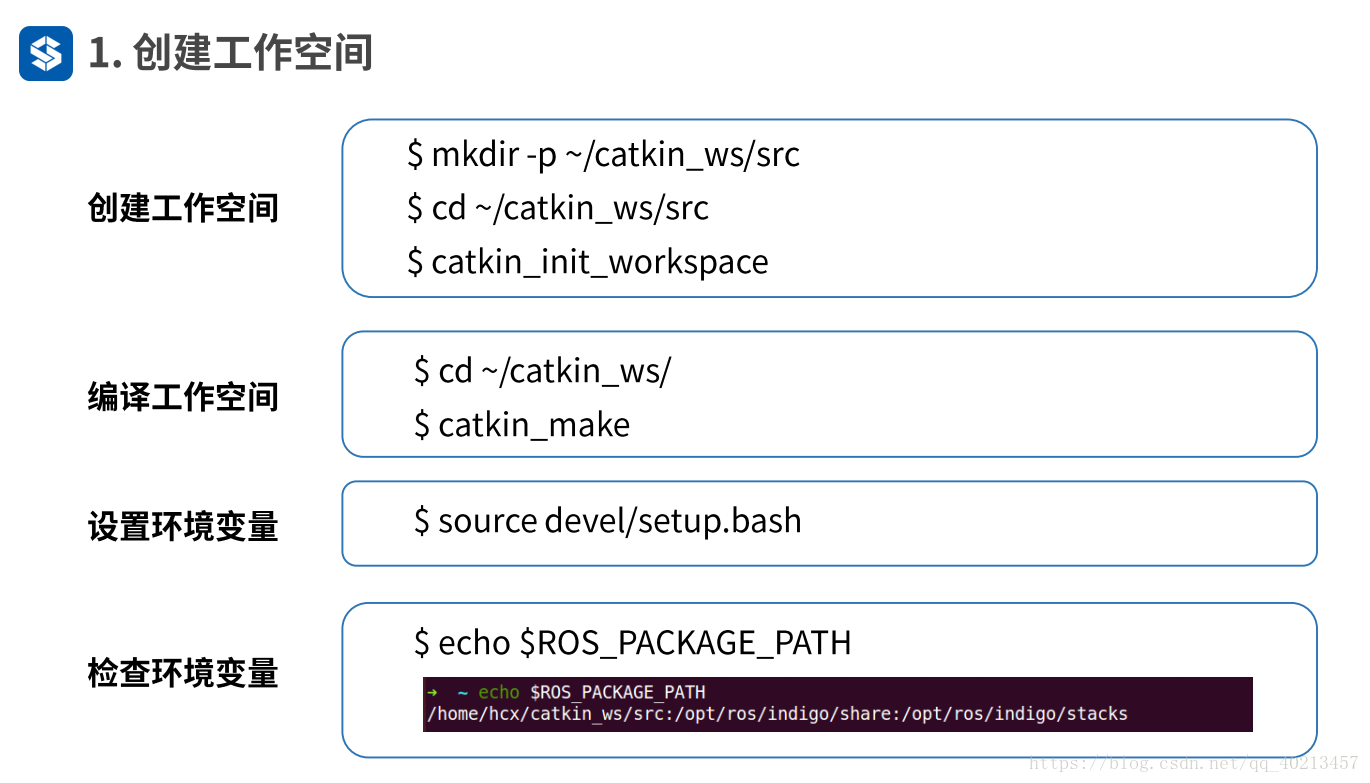
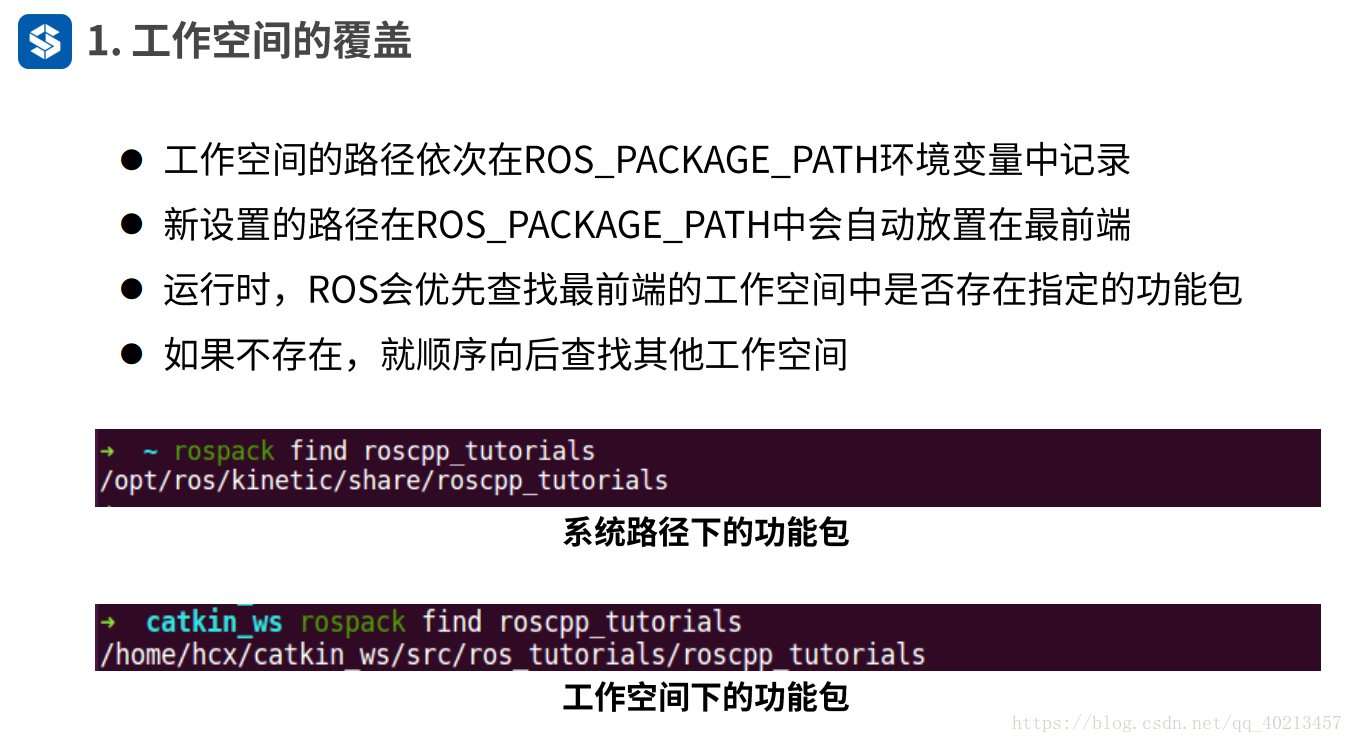
当前的工作空间在最前面,之前建的工作空间在后面
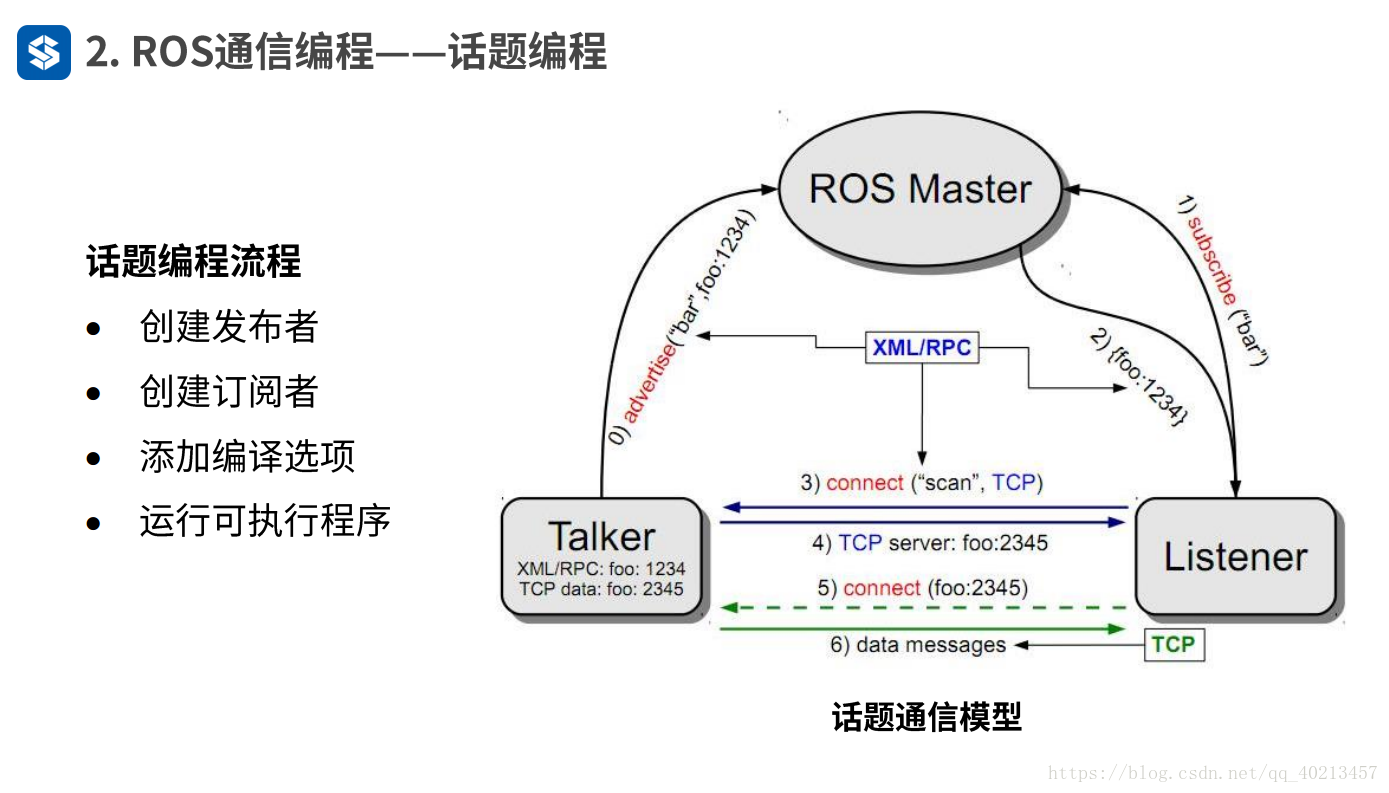
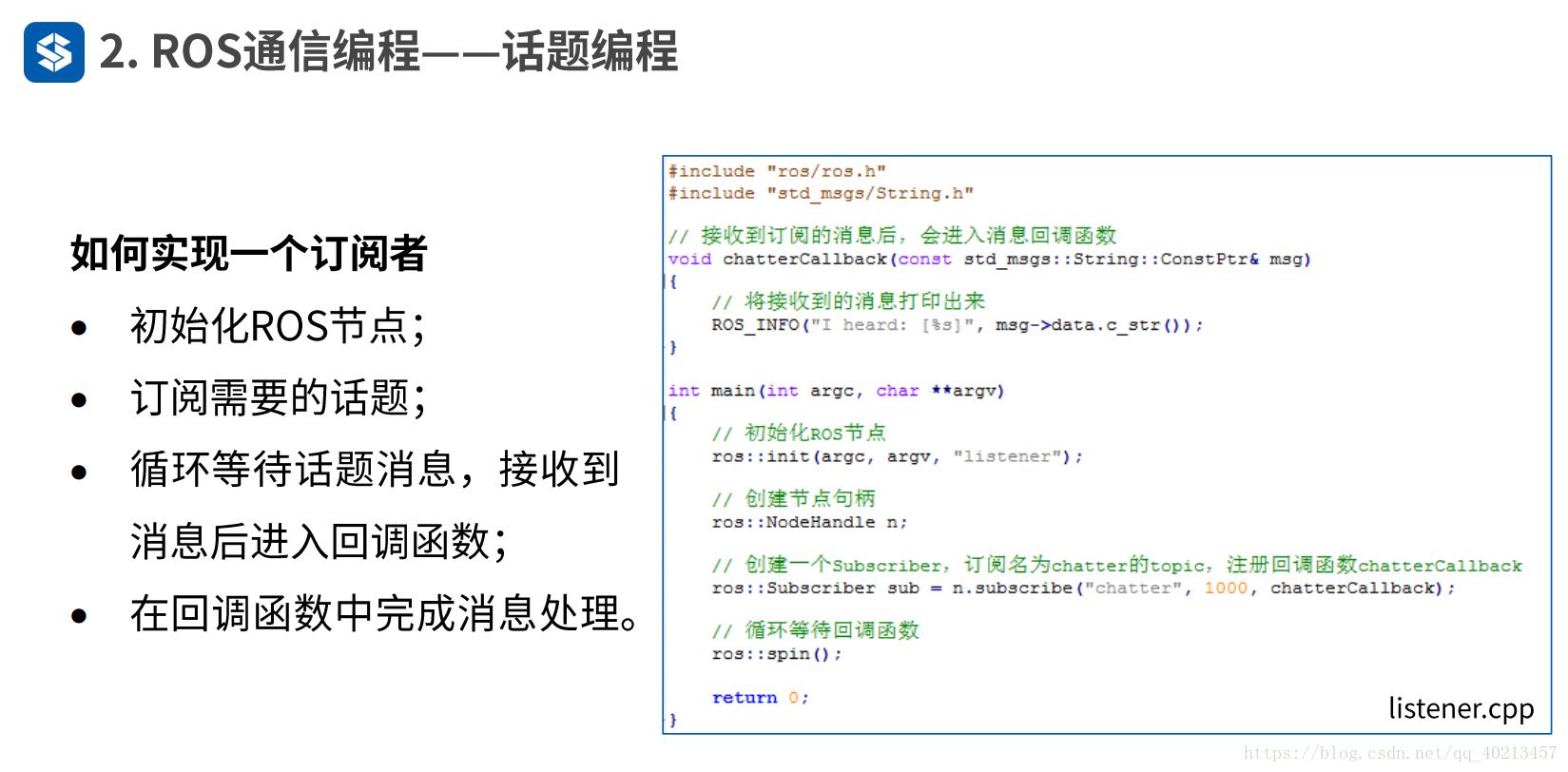
(“chatter",1000)//1000为队列长度,如果发布速度快,来不及发布的存到队列里,存满了之后删除时间存入较早的
depend依赖 std_msgs标准的数据结构 rospy pyrhon接口 roscpp C++接口
env | grep ros 和ros有关的所有环境变量
当前的工作空间在最前面,之前建的工作空间在后面
(“chatter",1000)//1000为队列长度,如果发布速度快,来不及发布的存到队列里,存满了之后删除时间存入较早的