文章目录
并行与分布式计算 第九章 算法设计
9.1 设计过程
9.1.1 PCAM设计过程
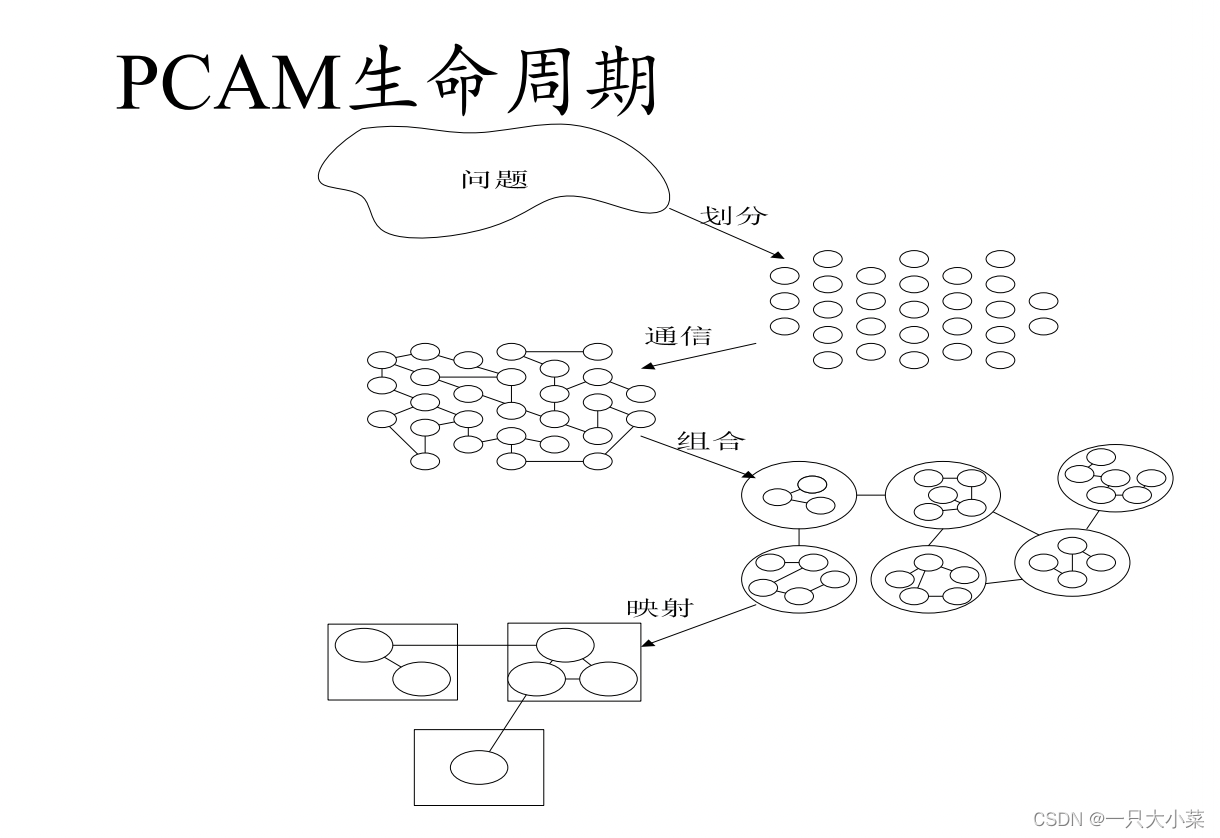
并行算法设计过程的四个阶段
• 划分(Partitioning)将大任务分解成小任务,尽量开拓并发性;
• 通讯(Communication) 确定诸任务间的数据交换,监测任务划分的合理性;
• 组合(Agglomeration) 依据任务的局部性优化通信成本或提高性能,必要时将一些小任务组合成更大的任务
• 映射(Mapping) 将每个任务分配到处理器上执行,监测其执行性能以备下一轮迭代优化。
9.1.2 划分
任务的划分
• 就是将原始计算问题分割成一些小的计算任务,以充分开拓算法中存在的并行性;
• 先进行数据分解(域分解domain decomposition),再进行计算功能的分解(功能分解functional decomposition)
• 划分的要点是力图避免数据复制和计算复制,使数据集和计算集互不相交;
• 划分阶段忽略处理器数目和目标机器的体系结构
域分解
划分的对象是数据,可以是算法的输入数据、中间处理数据和输出数据;
• 1优先集中划分最大的数据,将数据分解成大致相等的小数据片;
• 2划分时考虑数据上的相应计算操作,在计算的不同阶段,可能需要对不同的数据结构进行操作,或者需要对同一数据结构做不同的分解;
• 3如果一个任务需要别的任务中的数据,则会产生任务间的通讯;
• 4 划分的主要原理是时空局部性原理,注意时空窗口的粒度;
功能分解
• 划分的对象是计算,将所有计算过程划分为不同的任务;
• 划分后,如果不同任务所需的数据不相交的,则划分是成功的;
9.1.3 通信
任务的通信
• 通信,就是为了实现并行计算,诸任务之间所进行的数据传输。
• 划分产生的诸任务,一般不能完全独立执行,需要在任务间进行数据交流,从而产生了通信;
• 通信通常是数据从“生产者”向“消费者”的流动,“生产”和“消费”都是操作,而且具有时序关系,因而通信操作的划分无法通过域分解来确定,只能通过功能分解来确定;
• 诸任务本是并发执行的,通讯则限制了这种并发性;
通信模式
• 局部/全局通讯(空间局部性)
• 结构化/非结构化通讯(拓扑)
• 静态/动态通讯(身份和角色)
• 同步/异步通讯(是否阻塞)
通信判据
• 所有任务是否执行大致相当的通信量? • 是否尽可能的将全局通信化成局部通信?
• 各个通信操作是否能并行执行? • 通信操作与同步点的距离是否合适?便于异步并行执行
9.1.4 组合
任务的组合
• 组合是由抽象到具体的过程,使将组合的任务能在一类并行机上有效的执行;
• 合并小尺寸任务,减少任务数。如果任务数恰好等于处理器数,则也完成了映射过程;
• 通过增加任务的粒度和重复计算,可以减少通信成本;
• 保持映射和扩展的灵活性,降低软件工程成本,注意负载均衡
粒度控制
• 大量细粒度的任务未必能产生有效的并行算法,可能反而增加通信代价和任务调度代价。
• 表面-容积效应:一个任务的通信需求与它所操作的数据子域的表面积成正比,而这个任务的计算需求与它所操作的体积(=数据子域表面积*计算操作的深度)成正比;
• 体积不变的前提下,增加计算操作深度(又称重复计算或者冗余计算),能够减少子域表面积,进而减少通信量;
T总=T计算+T通信
组合判据
• 通过组合增加粒度是否减少了通讯成本?
• 用重复计算换取通信代价是否已权衡了其得益?
• 组合后是否保持了灵活性和可扩放性?
• 组合的任务数是否与问题尺寸成比例? • 组合后的各个任务是否保持了类似的计算和通讯代价?
• 有没有减少并行执行的机会?
9.1.5 映射
任务的映射
• 映射的目标:每个任务要映射到具体的处理器,减少算法的执行时间;映射实际是一种权衡,属于NP完全问题;
• 任务数大于处理器数时,域分解引入负载平衡问题,功能分解引入任务调度问题;
• 并发的任务放在不同的处理器,频繁通信的任务放在同一处理器
负载平衡算法
- 负载平衡分类
• 静态的:事先确定;
• 概率的:随机确定;
• 动态的:动态确定; - 基于域分解的:
• 递归对剖:多维空间上递归的选一维进行对剖;
• 局部算法:与邻居比较决定是否把任务迁给邻居;
• 概率方法:满足某概率条件的随机数发生器进行投放;
• 循环映射:等概率的特例;
8.2 设计方法
8.2.1 划分技术
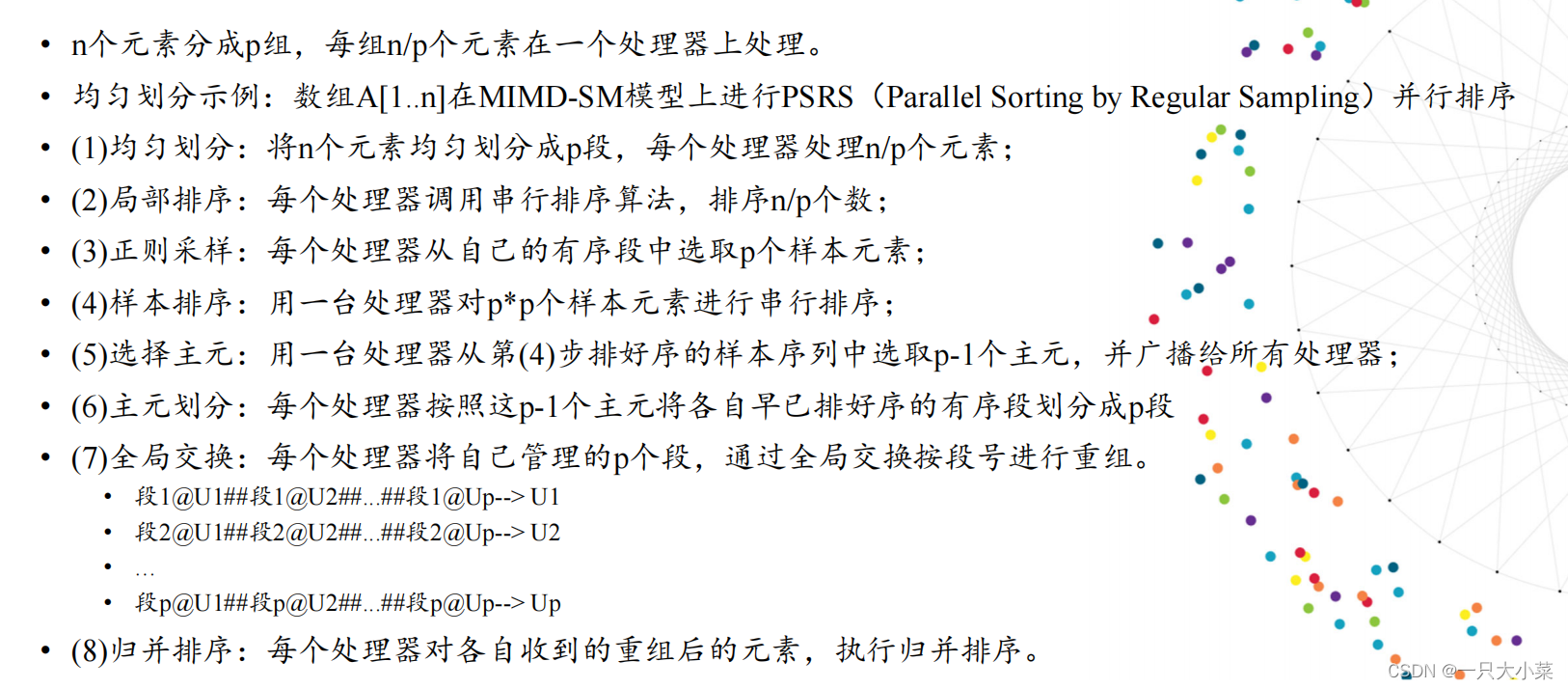
• 1.1 均匀划分法
• 1.2 平方根划分

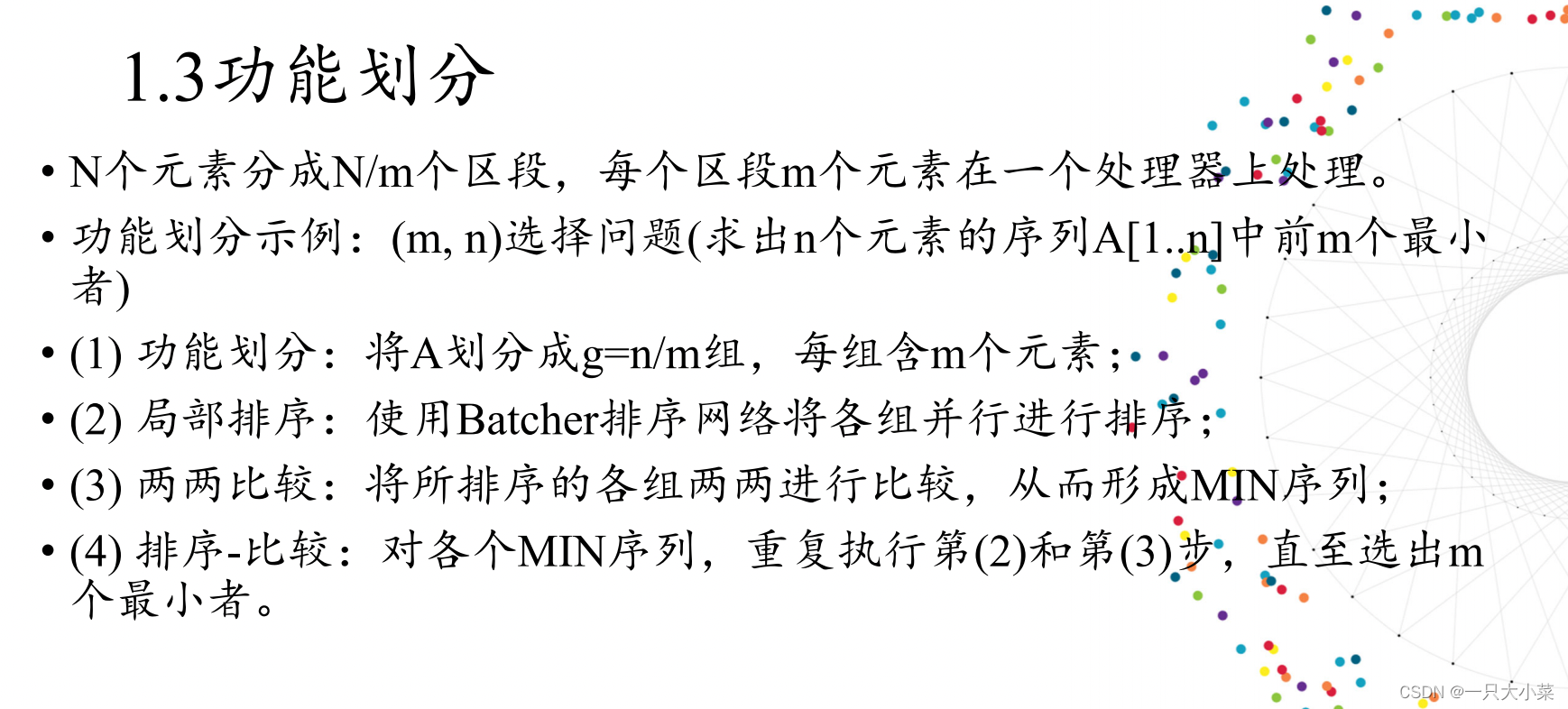
• 1.3 功能划分
9.2.2 分治
分治策略是一种问题求解的方法学,其思想是将原来的大问题分解成若干个特性相同的子问题分而治之。若得到的子问题仍然偏大,可以反复使用分治策略直到很容易求解的子问题为止。使用分治技术时,分解后的子问题通常和原来问题的类型相同,则很容易使用递归过程求解
分治v.s.划分
• 侧重点不同:划分是面向求解问题的需要或过程而进行的;分治是面向求解问题的简单,规范化而进行的。
• 难点不同:划分的难点是划分点的确定问题;分治的难点是问题间的同步通信和(递归)结果的合并问题。
• 子问题规模不同:划分是根据求解需要进行的,结果不一定是等分;分治一般是以1/k进行的等分
并行分治法的步骤
•(1)将输入划分成若干个规模相等的子问题;
•(2)同时(并行地)递归求解这些子问题;
•(3)并行地合并子问题的解,直至得到原问题的解。
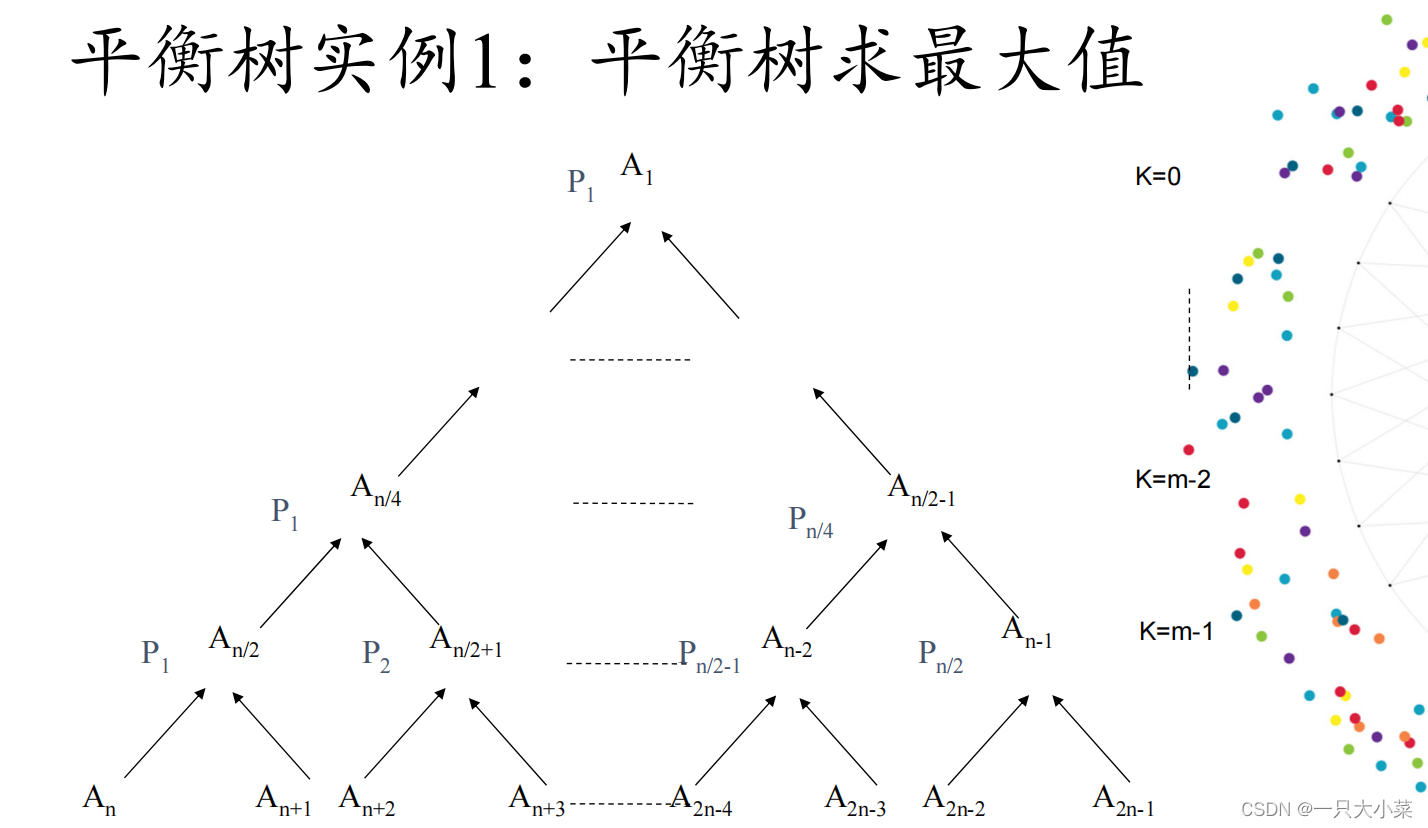
9.2.3 平衡树技术
平衡树(Balanced Tree)方法是将输入元素作为叶节点构筑一棵平衡二叉树,中间结点为处理结点,由叶向根或由根向叶逐层往返遍历,在树的同一深度上各节点并行计算。平衡二叉树可以推广到平衡多叉树。
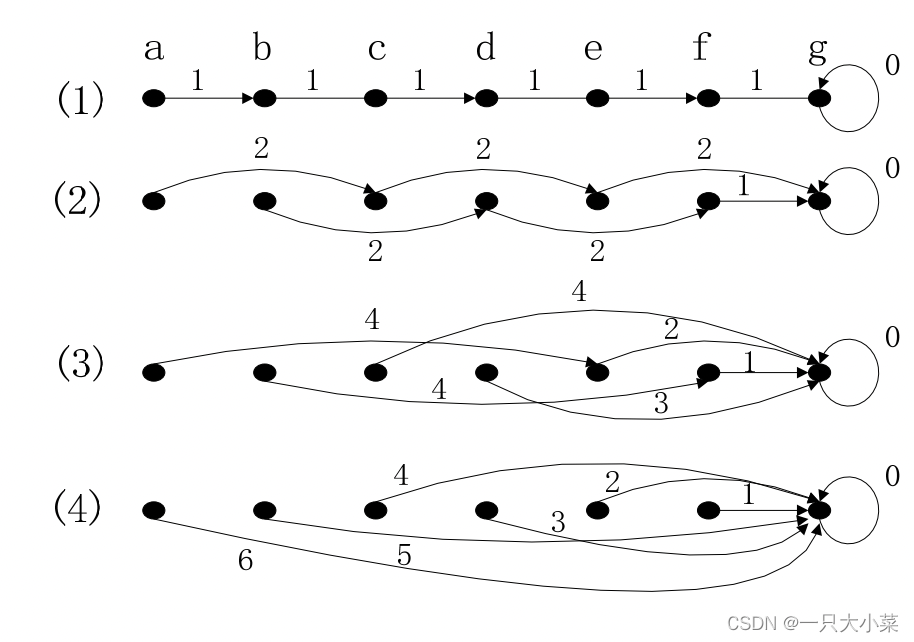
9.2.4倍增技术
倍增(Doubling)技术又称指针跳跃(pointer jumping)技术,当递归调用时,所要处理数据之间的距离逐步加倍,经过k步后即可完成距离为2^k的所有数据的计算。特别适合于处理链表或有向树之类的数据结构
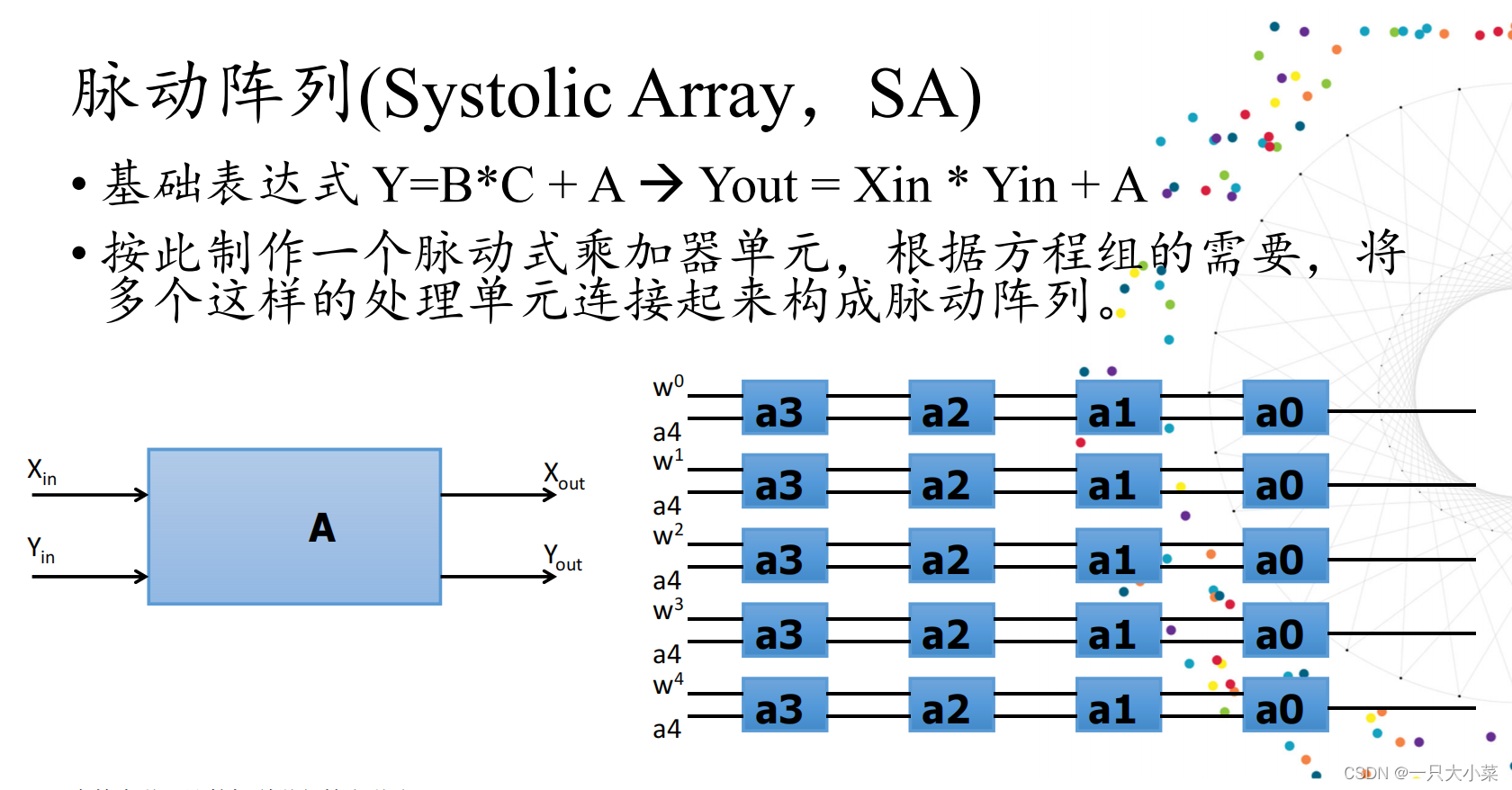
9.2.5 流水线技术
流水线(Pipelining)通过时间上重叠和空间上并行的方式,将一个计算任务T分成n个前后衔接的子任务T[1:n],使得tk的输出作为t(k+1)的输入,且tk完成后t(k+1)就可立即开始,并以同样的速度进行计算。
9.2.6 破对称技术
• 破对称(Symmetry Breaking)就是要打破某些问题的对称性,常用于图论和随机算法问题。
