经典著作,值得一读,英文原版下载链接【免费】ModernRadarforAutomotiveApplications资源-CSDN文库。
“雷达”一词代表无线电探测和测距。雷达是一种电磁系统,用于探测、定位、跟踪和识别一定区域内的不同物体。雷达向目标方向发射电磁能量,以观察目标的回波。目标可以是船只、飞机、天体、汽车等。在早期,雷达系统由于体积庞大,成本高,只用于军事领域。由于高频集成电路和单片微波集成电路的发展,现代微型雷达系统可以在印刷电路板甚至集成电路上实现[1-5]。雷达系统的应用已经扩展到商业领域,如穿墙检测[6-9]、室内定位[10-13]、生物医学应用[14,15]和驾驶辅助[16,17]。这本书的主题集中在雷达技术及其在汽车上的应用。
雷达是现代车辆安全系统中的一项关键技术。汽车雷达是高级驾驶辅助系统中的关键传感器,用于自适应巡航控制、防撞、盲点检测、变道辅助、停车辅助等。图1.1显示了车辆上典型的汽车雷达配置。安装在车辆前部的远程雷达(LRR)通常用于自适应巡航控制。安装在前后的中程雷达覆盖范围比LRR更广,可用于交叉交通警报和变道辅助。安装在角落的近程雷达支持停车辅助、障碍物/行人探测和盲点监测。在实际应用中,这些雷达通常协同工作以提供更可靠的检测结果。在工作频率方面,24ghz频段已用于传统汽车传感器。由于欧洲电信标准协会(European Telecommunications standards Institute)和美国联邦通信委员会(Federal Communications Commission)制定的频谱法规和标准,77 GHz频段已被广泛用于汽车雷达。主流汽车雷达的发展已经转向77GHz频段,这使得雷达具有更好的分辨率和更小的外形。
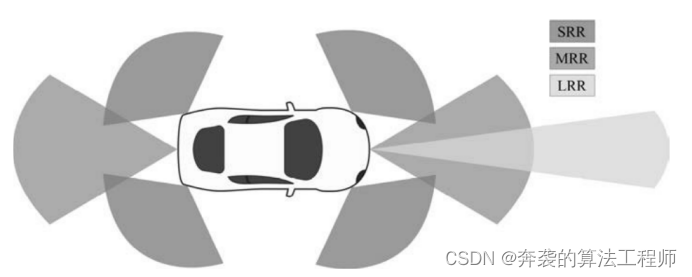
图1.1 车辆典型雷达配置
从驾驶辅助系统演变而来的全自动驾驶汽车对传感器的要求要高得多,尤其是对车载雷达。美国汽车工程师学会(SAE)根据人类参与驾驶[18]的程度,制定了六个普遍接受的自动驾驶汽车级别,其中包括零级,即没有自动化,而是完全由人类控制车辆。图1.2显示了驾驶自动化级别的定义。

图1.2 SAE自动驾驶等级
•1级(驾驶员辅助):人类驾驶员负责所有与汽车操作相关的任务,包括加速、转向、制动和监测周围环境。这辆车有一个自动驾驶系统,可以帮助转向或加速,但不能同时帮助两者。
•2级(部分自动化):在此级别,汽车中的自动化系统可以辅助转向和加速,而驾驶员仍负责大多数安全关键功能和环境监测。目前,道路上最常见的是2级自动驾驶汽车。
•3级(有条件自动驾驶):从3级开始,汽车本身通过利用自动车辆传感器监测环境,并执行其他动态驾驶任务,如制动。如果在驾驶过程中出现系统故障或其他意外情况,驾驶员必须做好干预的准备。
•4级(高度自动化):4级与高度自动化相关,即使在极端情况下,汽车也能够在没有驾驶员干预的情况下完成整个旅程。然而,也有一些限制:只有当系统检测到交通状况安全且没有交通堵塞时,驾驶员才能将车辆切换到该模式。
•5级(全自动驾驶):目前还不存在全自动驾驶汽车,但汽车制造商正在努力实现5级自动驾驶,即驾驶员只需指定目的地,车辆完全控制并负责所有驾驶模式。因此,5级自动驾驶汽车将没有任何人为控制的规定,比如方向盘或踏板。
自动驾驶汽车的未来看起来很棒;然而,实现一辆完全自动化的汽车仍然非常具有挑战性。目前,市场仍然由2级部分自动驾驶汽车主导。
如果没有传感器,自动驾驶汽车是不可能实现的。传感器可以让汽车看到和感知道路上的一切,并收集安全驾驶所需的信息。此外,为了构建从A点到B点的路径,并向汽车控制器发送适当的指令,例如转向、加速和制动,这些信息被处理和分析。此外,自动驾驶汽车上的传感器收集的信息,包括前方的实际路径、交通堵塞和道路上的任何障碍物,也可以通过车对车通信技术在连接的汽车之间共享[19,20],这对于驾驶自动化来说是非常有用的资源。当今大多数汽车制造商在自动驾驶汽车中最常使用以下三种类型的传感器:摄像头、雷达和激光雷达。与其他传感器相比,雷达以相对较低的成本提供目标的位置和速度。此外,雷达在恶劣环境下也很强健[21,22],如光线不足、恶劣天气和极端温度。这些特点使雷达成为自动驾驶汽车的独特传感器。
目前的汽车雷达技术大多是基于调频连续波(FMCW)雷达的原理,这种雷达已经被人们熟知了几十年。在本书中,以FMCW波形为例,首先介绍了现代汽车雷达的基本原理。空间维度是使用现代多输入多输出技术(MIMO)获得的,这将在下一章中介绍。随着相位调制等硬件功能的增加,以及具有独立调制功能的同时利用的发射和接收信道的扩大,传统的FMCW雷达系统设计和信号处理增加了新的自由度。随着越来越多的车辆采用车载雷达,该雷达不可避免地会受到同频段其他雷达的干扰。第4章将介绍干扰及其缓解方法。第5章介绍了雷达传感器如何与其他传感器集成以提高目标探测能力。第6章给出了几种用雷达对常见交通目标进行分类的方法。然后,在第7章中,将讨论利用雷达进行路面状况检测的应用。
在本书中,我们还认识到,汽车雷达的未来不仅应解决传统的外部应用,而且还应在内部应用中发挥重要作用,例如人机交互的手势感应,驾驶员/乘客的生命体征和存在监测。本书的第8章和第9章详细介绍了这些领域。