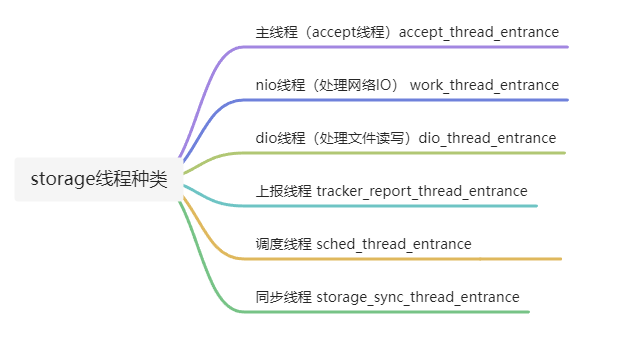
storage主要包括6种线程
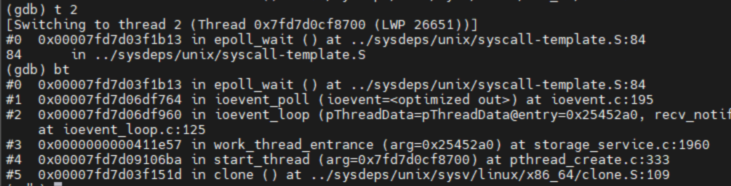
storage线程堆栈
gdb attach storage进程ID 可以看到各线程堆栈:

accept线程
主线程是accept线程

nio线程
nio即网络IO,主要负责网络IO处理
storage_service_init里创建了nio线程,work_thread_entrance
nio线程默认是4个,可以看到线程2到5堆栈停在epoll_wait
上报线程
线程6是tracker_report_thread_entrance,用作storage向tracker上报信息,获取其它storage信息。

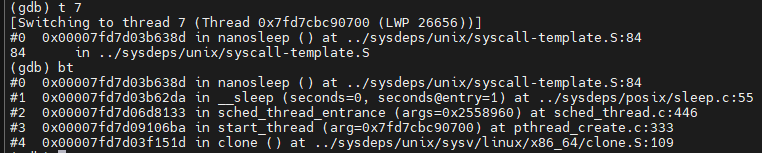
调度线程
线程7是调度线程,sched_thread_entrance,主要用作定时调度一些任务,例如定时将binlog缓冲区写到binlog文件。
该线程还包括日志同步,时间轮定时器。
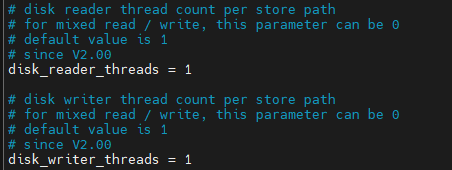
dio线程
dio即data IO,主要用来读写文件。
线程8和线程9的堆栈相同,都是dio线程,dio_thread_entrance。

根据storage默认的配置文件,这里一个是读磁盘线程,一个是写磁盘线程,默认读写分离。
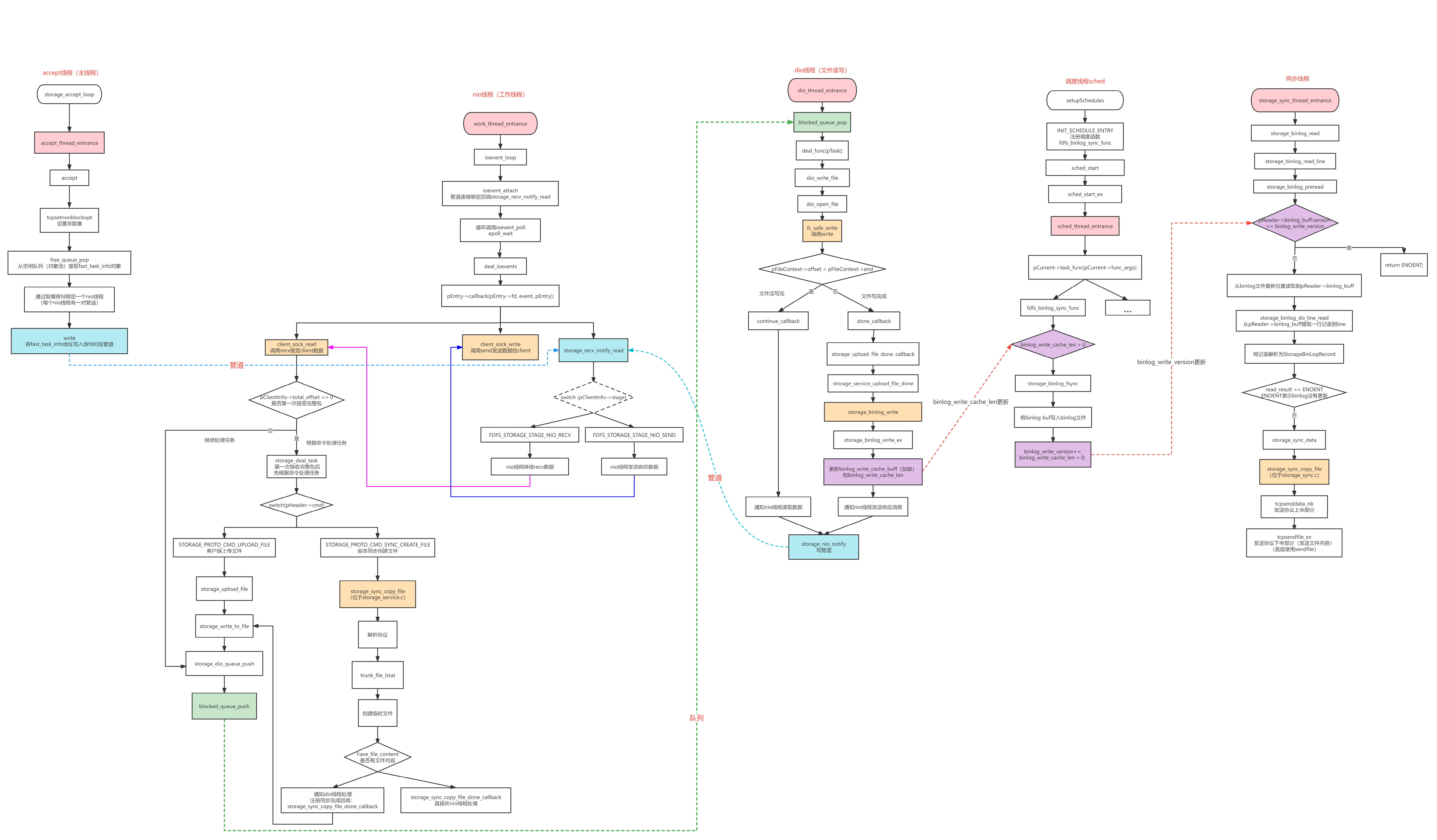
storage5个线程主要流程和通信
本文先不介绍上报线程,主要介绍其他5种线程,以上传文件为例,各线程流程图如下:
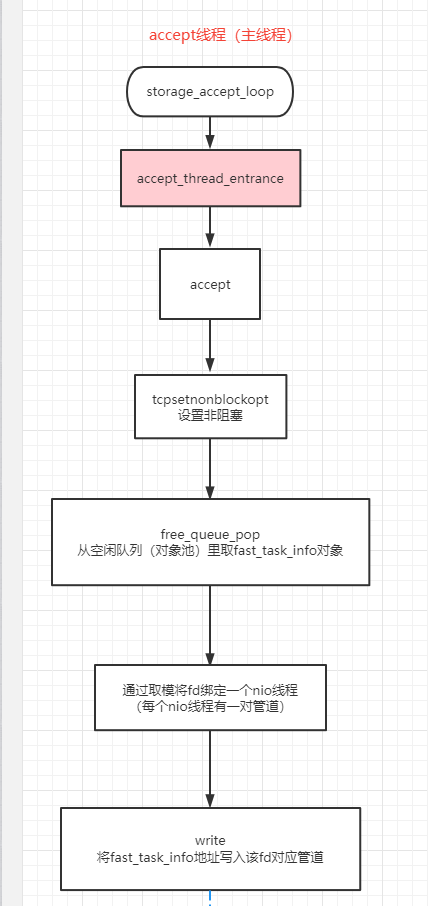
accept线程
accept线程数量可以配置,默认只有一个,主线程就是accept线程。主要用来接受连接,然后从空闲任务队列(对象池)里取一个fast_task_info对象。
对象池在storage_service_init里根据线程数量预先分配了:
bytes = sizeof(struct storage_nio_thread_data) * g_work_threads;
g_nio_thread_data = (struct storage_nio_thread_data *)malloc(bytes);
fast_task_info就是每个client(fd)对应的数据,包括读写缓冲区,还有一对管道用于其它线程和nio线程通信,nio线程绑定了管道的读端。
当client连接storage时,accept线程将fast_task_info对象的地址写入管道,然后nio线程会回调storage_recv_notify_read,刚连接会调用初始化函数storage_nio_init,也就是注册epoll读事件。
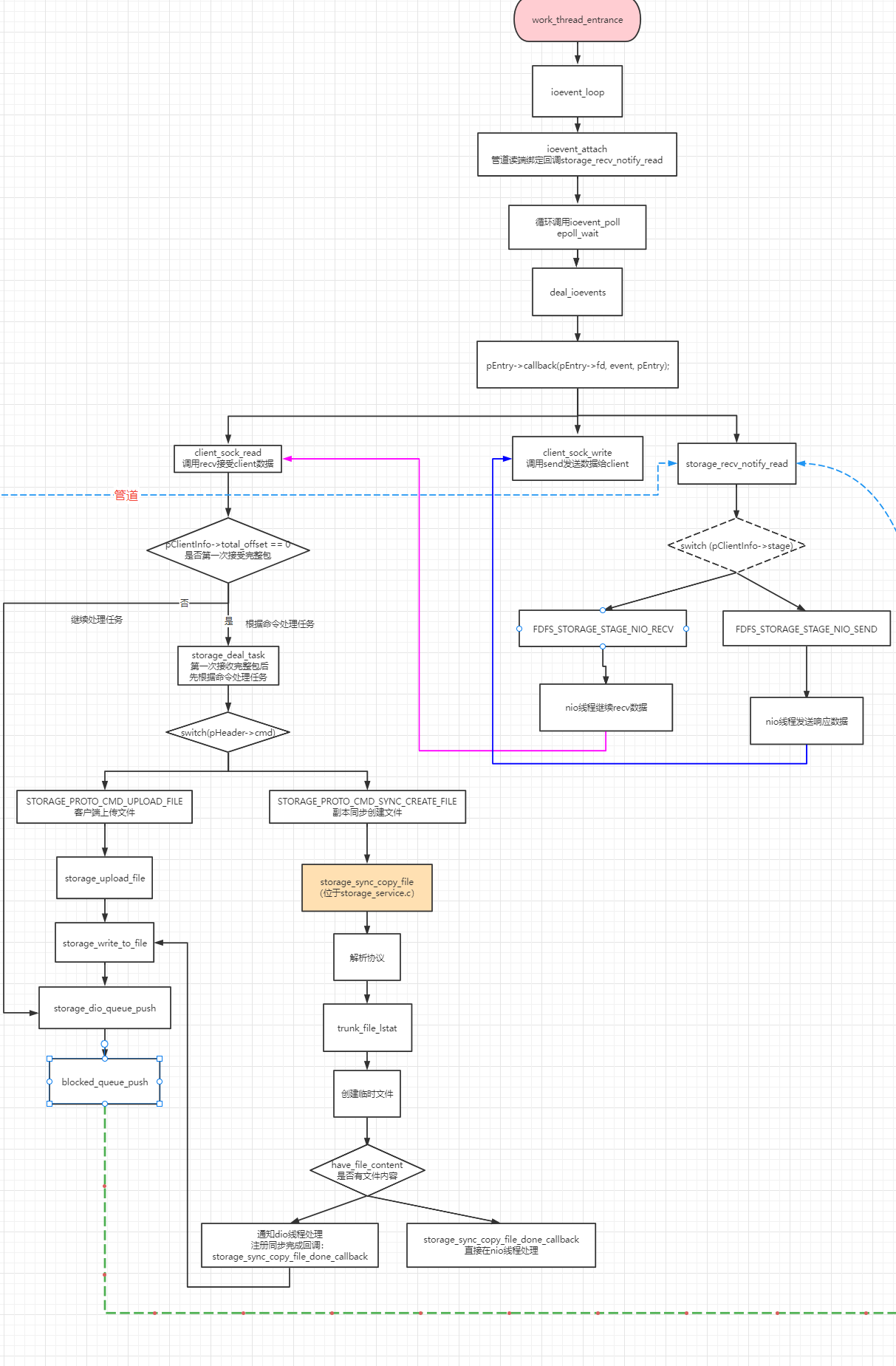
nio线程
nio线程,俗称工作线程,主要负责网络IO,核心函数是epoll_wait。然后根据事件类型调用不同的回调函数:
- client_sock_read
- client_sock_write
- storage_recv_notify_read
可以看到nio线程主要负责三个功能:
- 从client读数据,处理
- 发送数据给client
- 通过管道接受其它线程的通知
当client上传文件后,触发n次回调client_sock_read。
第一次接收完整包后先根据命令处理任务(storage_deal_task),上传文件的命令是STORAGE_PROTO_CMD_UPLOAD_FILE,在storage_write_to_file的最后会调用storage_dio_queue_push,storage_dio_queue_push里调用blocked_queue_push将fast_task_info插入阻塞队列里,后面dio线程会从阻塞队列取任务处理。
如果不是第一次接收完整包则直接调用storage_dio_queue_push。
当上传完文件时,回调用client_sock_write通知client。
当其它线程想要通知nio线程时,会写管道,触发回调storage_recv_notify_read。
例如accept线程,通知nio线程对fd注册读事件。
而dio线程在多次写部分文件后会通知nio线程继续读取数据。这里为什么是多次写文件呢,因为一个大文件不可能一次IO就能处理完,FastDFS默认设置一次最多recv 256K数据,假设client上传1M的文件,则实际发送>1M的数据(包括协议头),故nio线程要recv 5次,调用blocked_queue_push5次,dio线程要取5次任务,写5次数据。
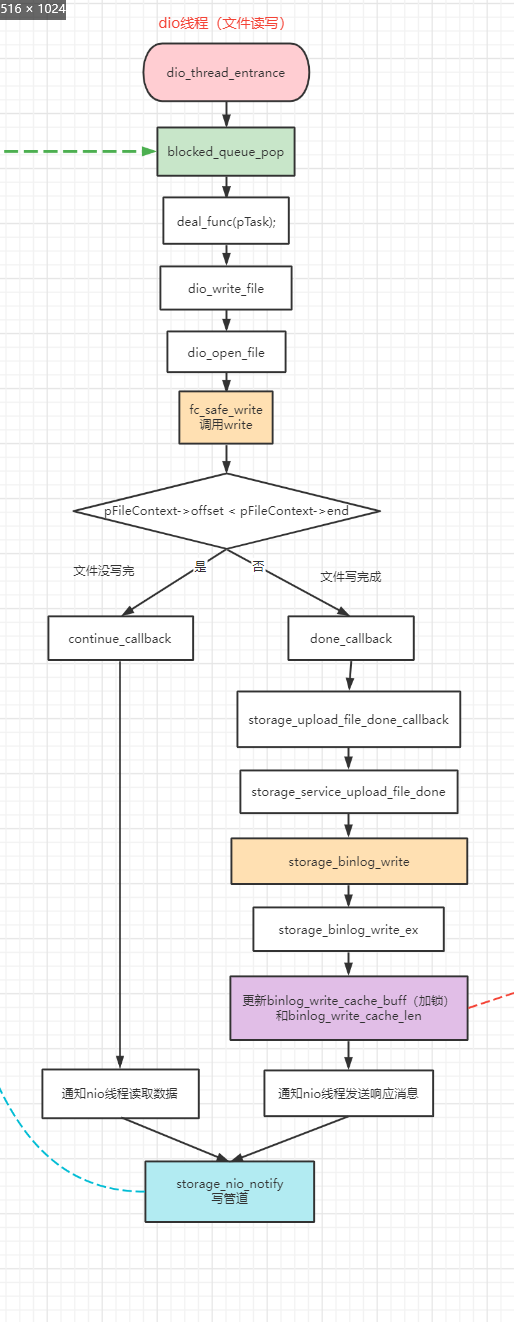
dio线程
dio线程主要负责文件读写,默认一个读线程一个写线程。
dio_thread_entrance函数非常简单,就是从阻塞队列取任务执行。
在client上传文件后,取出来的任务函数是dio_write_file。先调用dio_open_file打开文件,然后调用fc_safe_write写文件。
当pFileContext->offset < pFileContext->end,即文件没写完,则通知nio线程继续recv数据。
当nio线程又接收了数据,会再次将任务写入阻塞队列,dio线程再次取任务,写文件。
当pFileContext->offset >= pFileContext->end表明文件已写完,dio线程需要更新binlog。
每添加/删除/更新一个文件,binlog就会添加一条记录,用作同组所有storage的文件保存同步。
storage同步在后续介绍,本文重点关注线程。
在storage_binlog_write_ex中会更新binlog_write_cache_buff和binlog_write_cache_len
int storage_binlog_write_ex(const int timestamp, const char op_type, \
const char *filename, const char *extra)
{
int result;
int write_ret;
if ((result=pthread_mutex_lock(&sync_thread_lock)) != 0)
{
logError("file: "__FILE__", line: %d, " \
"call pthread_mutex_lock fail, " \
"errno: %d, error info: %s", \
__LINE__, result, STRERROR(result));
}
// 更新binlog_write_cache_buff和binlog_write_cache_len
if (extra != NULL)
{
binlog_write_cache_len += sprintf(binlog_write_cache_buff + \
binlog_write_cache_len, "%d %c %s %s\n",\
timestamp, op_type, filename, extra);
}
else
{
binlog_write_cache_len += sprintf(binlog_write_cache_buff + \
binlog_write_cache_len, "%d %c %s\n", \
timestamp, op_type, filename);
}
//check if buff full
if (SYNC_BINLOG_WRITE_BUFF_SIZE - binlog_write_cache_len < 256)
{
write_ret = storage_binlog_fsync(false); //sync to disk
}
else
{
write_ret = 0;
}
if ((result=pthread_mutex_unlock(&sync_thread_lock)) != 0)
{
logError("file: "__FILE__", line: %d, " \
"call pthread_mutex_unlock fail, " \
"errno: %d, error info: %s", \
__LINE__, result, STRERROR(result));
}
return write_ret;
}
注意这里加了同步线程锁,因为dio线程和调度线程都会访问binlog缓冲区。
binlog.000文件格式:

时间戳+操作类型+文件ID
更新完binlog缓冲区后,文件上传完成,调用storage_nio_notify写管道通知client。
调度线程
调度线程主要作用:
- 使用时间轮定时器处理超时任务
- 循环处理已注册的调度任务
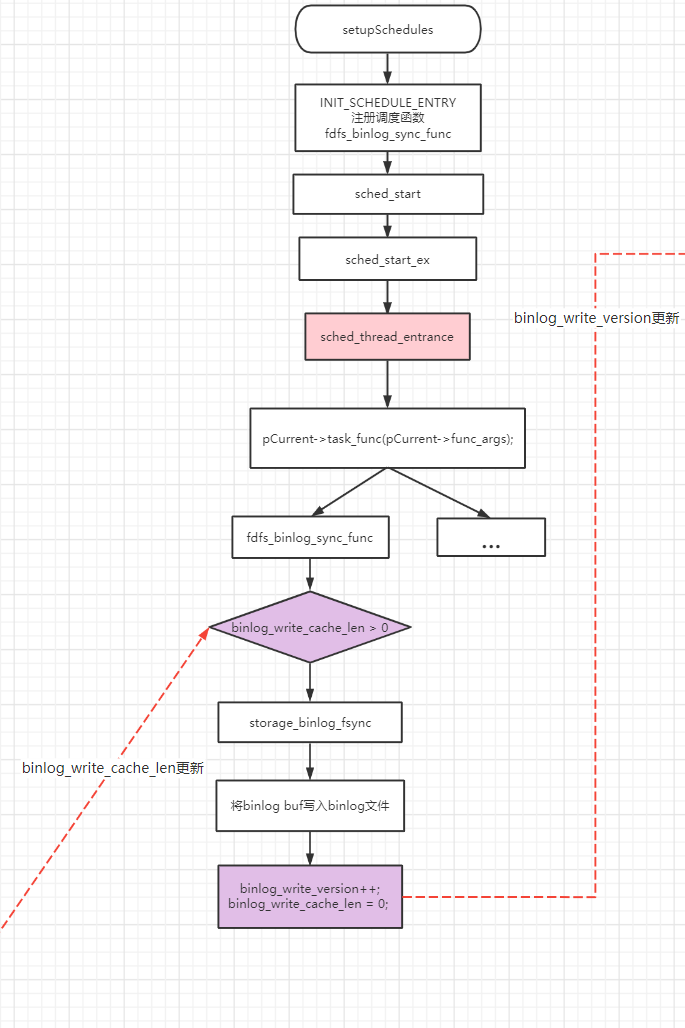
在setupSchedules总注册了日志同步,binglog同步(fdfs_binlog_sync_func),状态文件同步,trunk binlog同步等等调度任务。
由上知道dio线程在处理完上传文件后会写binlog缓冲区,此时binlog_write_cache_len增加,调度线程再次调用fdfs_binlog_sync_func时满足binlog_write_cache_len > 0,然后会调用storage_binlog_fsync。
int fdfs_binlog_sync_func(void *args)
{
if (binlog_write_cache_len > 0)
{
return storage_binlog_fsync(true);
}
else
{
return 0;
}
}
fdfs_binlog_sync_func中将binlog缓冲区写入binlog文件中,实现持久化。写完后++binlog_write_version,目的是让同步线程开始同步。
同步线程
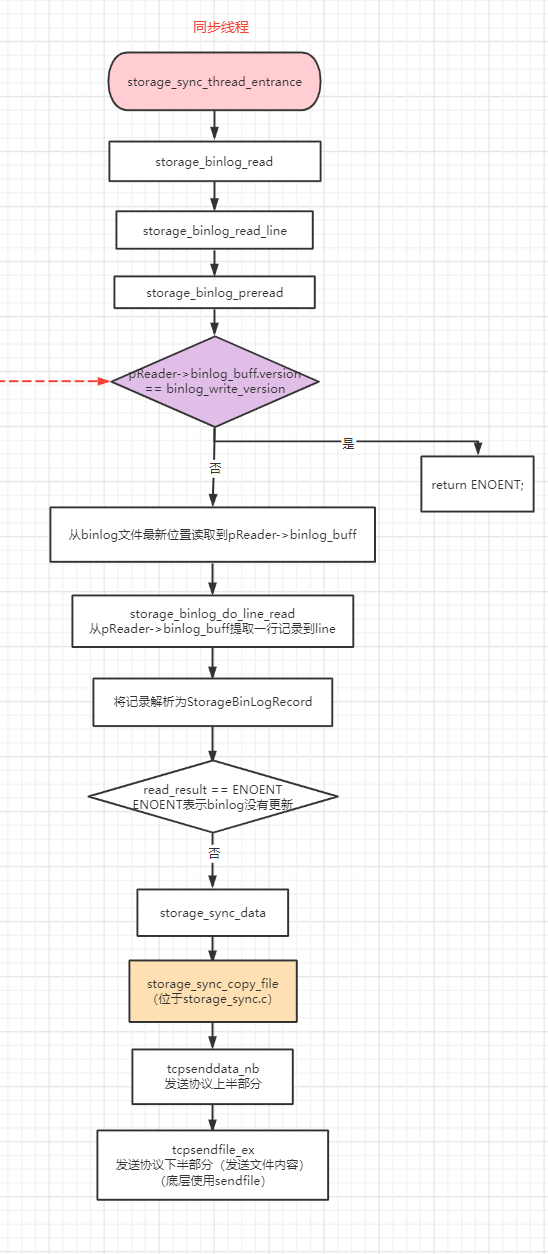
同步线程是在上报线程tracker_report_thread_entrance中创建的。假设有n个storage,则每一个storage会创建n-1个同步线程,分别向其它storage同步文件。
同步线程循环检测binlog状态,当在storage_binlog_read函数的storage_binlog_preread中检测到pReader->binlog_buff.version 和binlog_write_version不同,会读取binlog文件。
if (pReader->binlog_buff.version == binlog_write_version &&
pReader->binlog_buff.length == 0)
{
// binlog文件没有更新则直接返回
return ENOENT;
}
当成功提取一行binlog记录到StorageBinLogRecord后storage_binlog_read返回值read_result是0,然后就可以调用storage_sync_data同步文件了。
同步文件时先调用tcpsenddata_nb发送协议上半部分(即协议头+文件名,文件大小等字段),然后调用tcpsendfile_ex发送文件内容。tcpsendfile_ex的核心是sendfile。
至于被同步的storage(副本)是怎么更新文件和binlog的就放到后面讲同步时再说吧。