一、PID控制器原理
PID 控制的理论依据是以系统偏差为输入,使用权重相加的方式将比例,积分和微分三个环节合并输出以形成控制量,从而实现既定的控制目标。
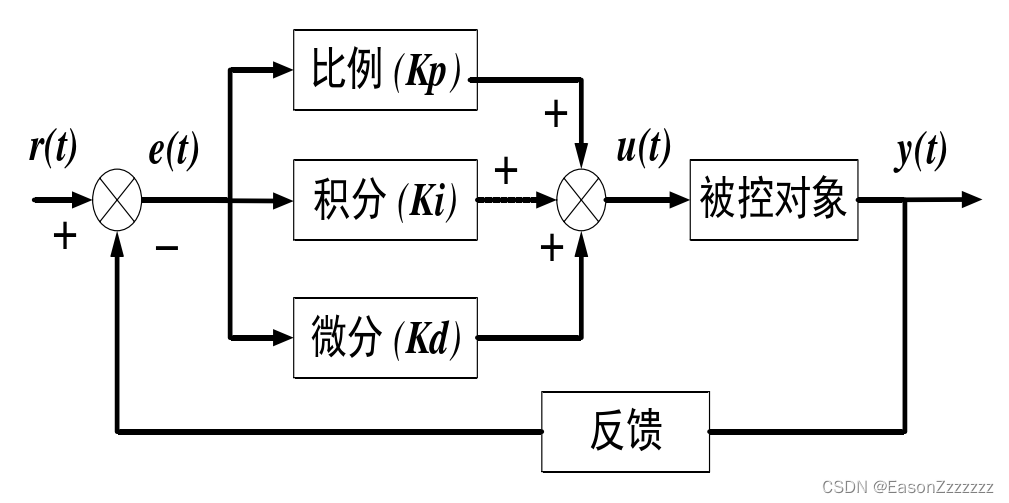
图中, e ( t ) e(t) e(t) 为系统输入进来的控制信号 r ( t ) r(t) r(t) 与系统输出控制量 y ( t ) y(t) y(t) 的反馈值之间的差值,该值经过比例、积分和微分环节的共同作用,进而转化为 PID 控制器的输出值 u ( t ) u(t) u(t)。这个过程可以用公式表示为:
u ( t ) = K p ⋅ e ( t ) + K i ∗ ∫ 0 t e ( t ) d t + K d d e ( t ) d t u(t) = K_p\cdot e(t) + K_i*\int_0^te(t)dt + K_d\dfrac{de(t)}{dt} u(t)=Kp⋅e(t)+Ki∗∫0te(t)dt+Kddtde(t)
式中的比例系数 K p K_p Kp、积分系数 K i K_i Ki、微分系数 K d K_d Kd,它们极大影响着 PID 的控制性能。因此有必要整定出三者合理的数值,并将它们输入到 PID 控制器中,使控制器获得良好的输入跟踪效果和较高的抗干扰能力。
二、PID参数整定
对于每个 PID 参数而言,其作用是各不相同的,因此在整定这三个参数的时候,需要考虑它们的优缺点,这就导致整定它们的方法有所不同,具体分为:
比例环节的作用对象是系统当前的误差值,它可以成比例地调节系统的误差。通常为了提高系统的响应速度, K p K_p Kp 会取的较大,然而不能过大,否则容易导致系统超调,进而降低稳定性;过小会使系统的响应速度过于低下,其结果是控制器失去了应有的实时控制效果。
若不管怎么改变比例系数,控制器总是难以完全地响应系统的输入,那么得引入积分环节,通过对过往误差的积累,实现系统稳态误差的归零。虽然随着积分系数 K i K_i Ki 取值的增大,积分的作用将得到增强,从而系统输出值更接近期望值,但 K i K_i Ki 也不能过大,否则易发生积分饱和。
对于微分环节来说,其是根据误差的变化率进行提前控制,从而预测误差的变化趋势,这有助于系统超调的减少,相当于增加了系统的阻尼,因此积分环节通常用于干扰的抑制。当然, K d K_d Kd 同样不能过大,因为这会使微分环节对高频噪声敏感的特性进一步放大,进而降低系统的抗扰动能力。