文章目录
前言
FrSky 遥测技术允许你显示 ArduPilot 的信息,如飞行模式、电池电量和错误信息,以及来自 OpenTx 兼容遥控发射机上其他 FrSky 传感器的信息,甚至包括较旧的 X9R 发射机(尽管功能较为有限)。
它尤其有用:
- 用于在没有地面控制站的情况下飞行(无需 MAVLink 遥测无线电);
- 作为地面站出现故障(如 MAVLink 无线电链路失效)时的备份;
- 当地面控制站由另一人操作时;
- 或飞行员快速了解情况。
此外,一些遥控发射机(如 Taranis 系列、Horus 和 T16)可通过高度可配置的 OpenTX 固件,根据遥测信息配置为播放声音、振动或执行自动遥控操作。

使用运行 FlightDeck 或 Yaapu 遥测脚本(Yaapu Telemetry Script)的 OpenTX 发射机进行常见 FrSky 遥测设置。
!Note
在 ArduPilot 增加 FrSky 遥测协议之前,需要使用外部转换器将自动驾驶仪的普通 MAVLink 遥测数据转换为与 FrSky Sport 兼容的遥测数据(请参阅 MavLink 至 FrSky 转换器)(MavLink to FrSky Converters),但现在不再需要这样做了。不过,MAV2PT 转换器(MAV2PT converter)特别适用于转换许多远程遥控系统的 MAVLink 遥测输出,以便在 OpenTX 发射器上显示,或通过蓝牙或 WiFi 转发到运行地面控制站的智能手机或 PC。
1 设置
要使用 FrSky 遥测技术,需要采取以下步骤:
- 将自动驾驶仪遥测端口连接到带有 SPort 或 Fport 接口的 FrSky 接收机。这可能需要一个双向逆变器,具体取决于所使用的自动驾驶仪。请参阅连接 FrSky Sport 和 FPort(Connecting to FrSky Sport and FPort);
- 配置自动驾驶仪;
- 安装 LUA 脚本以显示全部遥测数据。(虽然可以使用 OpenTX 内置的遥测屏幕显示遥测值的子集,但非常有限)。
连接示意图
参见
以获取连接图。
配置
有两种协议可供选择:Repurposed 和 PassThrough。由于可以传输和显示更多的遥测信息,Repurposed 协议已被 PassThrough 协议取代。
首先将所用遥测端口的 SERIALxPROTOCOL 设置为"10"。
!Note
SERIAL 端口号不一定与 UART 或 TELEM 端口标签直接对应。请参阅自动驾驶仪(autopilot)的硬件文档。
如果你拥有 F7 或 H7 自动驾驶仪,因此不需要使用外部逆变器,则必须打开 SERIAL 端口的逆变器,并将其设置为半双工。
!Note
对 UART 的任何配置更改都需要重新启动才能生效。
一般来说,使用外部双向变频器的 F4 自动驾驶仪可以使用任何具有以下配置的 UART:
- SERIALx_PROTOCOL = 10;
- SERIALx_OPTIONS = 160(启用 TX 和 RX 引脚上的上拉/下拉功能,以满足外部反相器电路的需要)。
基于 F4 的自动驾驶仪使用接收器的"反相 SPort"输出,可以通过配置将其连接到任何 UART 的 TX 引脚:
- SERIALx_PROTOCOL = 10;
- SERIALx_OPTIONS = 4 (Half Duplex)。
!Note
基于 F4 的自动驾驶仪无法使用带有"反相 SPort"输出的 RX 引脚,因为只有基于 F7/H7 的自动驾驶仪才具有 SWAP 功能。
基于 F7/H7 的自动驾驶仪可以直接连接到任何 UART 的 TX 引脚,并使用这种配置:
- SERIALx_PROTOCOL = 10;
- SERIALx_OPTIONS = 7 (invert TX/RX,Half Duplex)。
OR 连接到 RX 引脚:
- SERIALx_PROTOCOL = 10;
- SERIALx_OPTIONS = 15 (反相 TX/RX、半双工、交换 TX/RX 引脚)。
!Note
某些 F7/H7 自动驾驶仪的 UART 上有电平/移位器,会导致半双工操作延迟,如 CubeOrange。如果上述配置无法解决这个问题,可以尝试设置 RC_OPTIONS = 8,这样就可以在协议中添加填充以适应这种情况。不过,在不需要的情况下使用该选项会破坏操作。
将 FRSKY_OPTIONS 第 0 位设置为"1",以启用向显示脚本交替发送空速和地速数据。用于 OpenTX 的 Yaapu FrSky 遥测脚本(Yaapu FrSky Telemetry Script for OpenTX)可以使用此功能,但可能会导致其他显示应用程序/脚本交替读取速度值。
显示脚本
有几种方案可供选择:
2 Turnigy 9XR Pro
本节介绍如何在 Turnigy 9XR Pro 发射机上启用 FrSky 遥测功能。
要求
你需要一个支持 FrSky 遥测技术的发射机模块,如 FrSky XJT。DJT 也支持遥测,但你需要使用外部调试线将遥测数据从模块连接到发射机。
本节中的说明专门针对 XJT 模块。
你需要运行最新版本(211 或更高版本)的 ErSky9x 固件。你可以从文档(the documentation)中找到更多关于固件升级和 ErSky9x 的信息。
配置ArduPilot
确保将相应的 SERIAL#_PROTOCOL 参数设置为 10("直通 FrSky 遥测"),以选择 ArduPilot SPORT 协议。例如,如果将 SmartPort 调试线插入 Pixhawk 的串行 4/5 端口,则将 SERIAL4_PROTOCOL 设置为 10。
更改后重新启动控制器。
ErSky9x 也能与协议 4("重新利用的 FrSky 遥测")配合使用,但无法访问特定于 ArduPilot 的信息,如当前飞行模式名称或解锁状态。
配置9XR Pro
1. 确认运行的是 211 或更高版本。导航至Radio Setup菜单,然后选择Version。查看 SVN 字段。
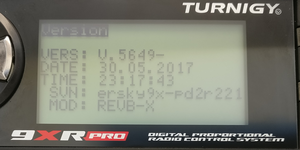
218 版及以后的版本大大改进了遥测支持。
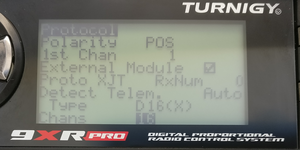
2. 导航至 Model Setup 菜单,然后选择 Protocol。确保 Proto 设置为 XJT,Type 设置为 D16。
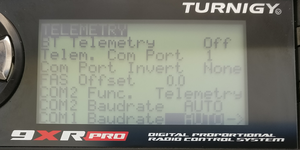
3. 导航至 Model Setup 菜单,然后选择 Telemetry,再从弹出菜单中选择 Telemetry。确保 UsrProto 设置为 ArduP(用于 ArduPlane)或 ArduC(用于 ArduCopter),Telemetry Com Port(之前为 FrSky Com Port)为 1,Com Port Invert(之前为 Invert Com 1)为关闭(未选中)。
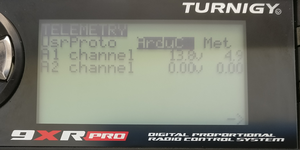
如果你使用的不是 ArduPlane 或 ArduCopter,可以将 UsrProto 设置为 FrSky。你将获得一个更基本的遥测显示,其中缺少图形航向指示器、当前飞行模式名称等内容。
此时,你的 9XR Pro 应该可以接收到扩展遥测数据。如果你导航到遥测主屏幕(使用向上/向下箭头在屏幕之间切换),你应该可以看到标准的 FrSky 遥测值(如 RSSI、接收机电压等)以及扩展遥测值,如飞行模式、当前测量值、GPS 信息等。

使用左/右箭头在可用的遥测视图之间切换:

配置自定义遥测屏幕
ErSky9x 允许你自定义两个遥测显示屏幕,并选择相关信息。要配置自定义屏幕,请导航至 Model Setup,然后选择 Telemetry,再选择 Custom:

与 FrSky 遥测技术相关的其他页面: