1.1 什么是OptaPlanner
每个组织都面临规划问题:为产品或服务提供有限的受约束的资源(员工、资产、时间和金钱)。OptaPlanner用来优化这种规划,以实现用更少的资源来做更多的业务。 这被称为Constraint Satisfaction Programming(约束规划,这是运筹学学科的一部分)。
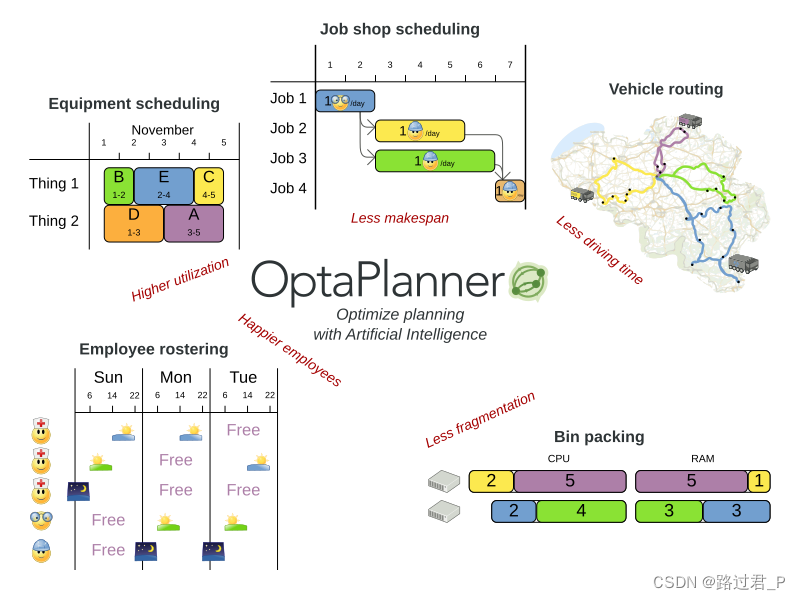
OptaPlanner 是一个轻量级、可嵌入的约束满足问题求解引擎,可优化规划问题。它适用的场景例如:
- 员工轮班排班:为护士、修理工等排班。
- 议程安排:安排会议,约会,维护工作,广告等。
- 教育方面的排班:安排学科,课程,考试,学术会议等。
- 车辆路线:利用已知的地图工具规划运输货物和/或乘客的车辆路线,这些路线可以经过多个目的地。
- 装箱问题:如何使用装箱、卡车、船舶和存储仓库装载物品,或者是云计算中如何跨计算机资源打包信息。
- 车间作业调度:汽车装配线规划、机器队列规划、劳动力任务规划等。
- 切割库存:在切割纸张、钢材、地毯等时最大限度地减少浪费。
- 体育日程安排:为足球联赛、棒球联赛规划比赛和训练时间表。
- 财务优化:投资组合优化、风险分散等。
1.2 什么是规划问题

规划问题存在一个基于有限资源和特定规则的最优解。最优解可以是任何数量的事务,例如:
- 利润最大化
- 环境影响最小化
- 员工和顾客满意度最大化
实现这些目标的能力取决于可用资源的数量,例如:
- 人员数量
- 时间
- 预算
- 实物资产(机械、车辆、计算机、建筑物等)
还必须考虑与这些资源相关的特定限制,例如一个人的工作小时数、他们使用某些机器的能力或设备之间的兼容性。
OptaPlanner可以帮助Java程序员有效地解决约束满足问题。它使用非常有效的得分计算,将优化启发式和元启发式算法结合在一起。
1.2.1 规划问题是NP-Complete还是NP-Hard问题
NP-Hard问题是指在多项式时间内无法解决的问题。这些问题通常是非常困难的,因为它们的解决需要大量的计算资源。NP-Hard问题的例子包括旅行推销员问题、分治问题等。
NP-Complete问题是指在多项式时间内可以解决,但在NP-Hard问题的解决过程中可以被解决的问题。这些问题的解决通常比NP-Hard问题的解决要快,但仍然需要大量的计算资源。NP-Complete问题的例子包括完全背包问题、分支界限问题等。
前面提到的所有场景都可能是NP-Complete或者NP-Hard的,也就是说:
- 在合理的时间内验证问题的给定解决方案很容易。
- 没有灵丹妙药可以在合理的时间内找到问题的最佳解决方案。(至少,世界上最聪明的计算机科学家还没有发现这样的灵丹妙药。 但是,如果他们找到一个适用于某个NP-Complete问题的解决方案,它将适用于每个NP-Complete问题。)
这意味着解决问题可能比你预期的要困难,因为常用的技术不足以解决问题:
- 蛮力算法(即使是再聪明的变体)将会耗费大量的时间
- 快速算法(例如在装箱问题中,先放入最大的物品)将得到远远偏离最优解的解决方案。
通过使用先进的优化算法,OptaPlanner 可以在合理的时间内为这类规划问题找到接近最优的解决方案。
1.2.2 规划问题存在约束(硬约束或软约束)
通常,规划问题存在至少两个级别的约束:
- 绝对不可破坏的(负面)硬约束。(例如,一名教师不能同时教授两节不同的课程。)
- 如果可以避免,就不应该破坏的(负面)软约束。(例如:某教师不喜欢在星期五的下午授课。)
某些问题也可能存在积极的约束:
- 如果可能的话,应该满足的(正向的)软约束。(例如,某教师喜欢在星期一的上午授课。)
某些基础问题(例如N皇后问题)只存在硬约束。某些问题存在三个或更多级别的约束,例如硬、中等、软约束。
这些约束定义了规划问题的得分计算(也称为适应度函数)。规划问题的每个解决方案都可以用得分评级。在 OptaPlanner 中,得分约束用面向对象的语言(例如Java代码)编写。这样的代码易于编写、灵活且可扩展。
1.2.3 规划问题存在巨大的搜索空间
规划问题有许多解决方案。 这些解决方案可划分为以下几类:
- 不考虑是否破坏任何约束的possible solution(可能方案)。规划问题往往存在大量这种毫无价值的解决方案。
- 不破坏任何负面硬约束的feasible solution(可行方案)。可行方案往往与可能方案数量相对。有时候没有可行方案。每一个可行方案都是可能方案
- 得分最高的optimal solution(最佳方案)。规划问题至少有一个最佳方案。即使没有可行方案,且最佳方案不可行的情况下也是如此。
- 在给定时间内找到的最高分的best solution(最优方案)。最优方案可能是可行的,如果时间充裕的话,它就是最佳方案。
与直觉相反,即使数据集很小,可能方案的数量也是巨大的(如果计算正确的话)。正如你在例子中看到的,大多数案例比已知宇宙中原子的数量(10^80)有更多的可能方案。由于没有找到最优解决方案的灵丹妙药,因此任何实现都必须评估一部分的可能方案。
OptaPlanner支持多种优化算法,可以有效地处理大量可能方案。 根据用例的不同,某些优化算法的性能优于其他算法,但无法提前判断。使用 OptaPlanner,只需几行XML或代码来修改求解器的配置,即可轻松切换优化算法。