参考资料:
python opencv3 基于ORB的特征检测和 BF暴力匹配 knn匹配 flann匹配 - 知乎
Python OpenCV中的drawMatches()关键点匹配绘制方法详解_cv2.drawmatches_乔卿的博客-CSDN博客
import cv2 as cv
import numpy as np
import matplotlib.pyplot as plt
img_car = cv.imread("../SampleImages/car.png", cv.IMREAD_COLOR)
img_carbody = cv.imread("../SampleImages/carbody.png", cv.IMREAD_COLOR)
#ORB特征提取
#参考资料:https://zhuanlan.zhihu.com/p/141360894
#1. 创建ORB对象
# orb = cv.ORB_create()
orb = cv.ORB_create()
#2. 检测关键点,生成描述符
# kp,des = orb.detectAndCompute(img, None)
# img:原图
# kp: 检测出的关键点
# des:关键点描述符
keypoints_car,des_car = orb.detectAndCompute(img_car, None)
keypoints_carbody,des_carbody = orb.detectAndCompute(img_carbody, None)
#使用暴力匹配器进行特征匹配
#1. 创建暴力匹配器对象
bf = cv.BFMatcher(cv.NORM_HAMMING, crossCheck=True)
#2. 使用匹配器的match方法进行特征匹配
matches = bf.match(des_car, des_carbody)
#3. 对结果进行排序,排序使用的参数是距离
matches = sorted(matches, key=lambda x: x.distance)
#绘制匹配项
#cv.drawMatches( img1, keypoints1, img2, keypoints2, matches1to2, outImg, matchesThickness[, matchColor[, singlePointColor[, matchesMask[, flags]]]] ) -> outImg
#img1:第一张原始图像。
#keypoints1:第一张原始图像的关键点。
#img2:第二张原始图像。
#keypoints2:第二张原始图像的关键点。
#matches1to2:从第一个图像到第二个图像的匹配,这意味着keypoints1[i]在keypoints2[Matches[i]中有一个对应的点。
#outImg:绘制结果图像。
#matchColor:匹配连线与关键点点的颜色,当matchColor==Scalar::all(-1) 时,代表取随机颜色。
#singlePointColor:没有匹配项的关键点的颜色,当singlePointColor==Scalar::all(-1) 时,代表取随机颜色。
#matchesMask:确定绘制哪些匹配项的掩码。如果掩码为空,则绘制所有匹配项。
#flags:绘图功能的一些标志。具体有:
# cv.DRAW_MATCHES_FLAGS_DEFAULT
# cv.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS
# cv.DRAW_MATCHES_FLAGS_DRAW_OVER_OUTIMG
# cv.DRAW_MATCHES_FLAGS_NOT_DRAW_SINGLE_POINTS
#参考资料:https://blog.csdn.net/qq_41112170/article/details/124651286
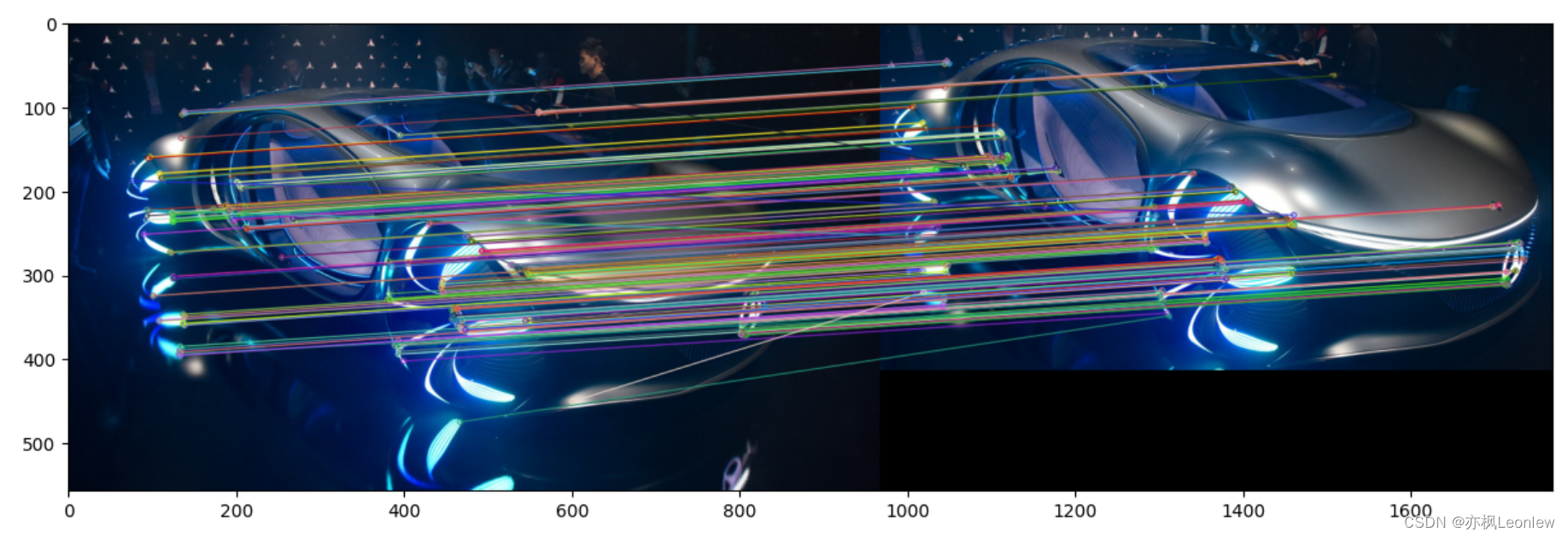
img_match_result = cv.drawMatches(img_car, keypoints_car, img_carbody, keypoints_carbody, matches, None, flags=2)
plt.figure(figsize=(15,15))
plt.imshow(img_match_result[:,:,::-1])