目录
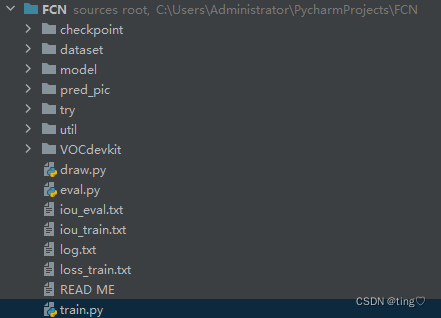
大致框架
- checkpoimt:存放中间的结果文件
- dataset:存放加载数据集的文件
- model:存放网络模型
- pred_pic:存放混淆矩阵可视化图片
- try:存放测试某些函数功能的代码,可忽略
- util:工具脚本
- VOCdevkit:数据集
- eval.py:计算测试集性能指标的代码
- draw.py:绘制loss曲线(或其他各种指标曲线)
- train.py:训练代码
dataset:存放加载数据集的文件
#pascal_data.py
import torch
import torchvision.transforms as tfs
import os
import scipy.io as scio
import numpy as np
from PIL import Image
import matplotlib.pyplot as plt
import random
# PASCAL VOC语义分割增强数据集
prefix = "C:/Users/Administrator/PycharmProjects/FCN/VOCdevkit/VOC2012/"
# 超参数,设置裁剪的尺寸
CROP = 256
class PASCAL_BSD(object):
def __init__(self, mode="train", change=False):
super(PASCAL_BSD, self).__init__()
# 需要将标签和像素点颜色之间建立映射关系
# 读取数据的模式
self.mode = mode
# voc数据集对应类别标签,一共有20+1个类
self.classes = ['background', 'aeroplane', 'bicycle', 'bird', 'boat',
'bottle', 'bus', 'car', 'cat', 'chair', 'cow', 'diningtable',
'dog', 'horse', 'motorbike', 'person', 'potted plant',
'sheep', 'sofa', 'train', 'tv/monitor']
# 颜色标签,分别对应21个类别
self.colormap = [[0, 0, 0], [128, 0, 0], [0, 128, 0], [128, 128, 0], [0, 0, 128],
[128, 0, 128], [0, 128, 128], [128, 128, 128], [64, 0, 0], [192, 0, 0],
[64, 128, 0], [192, 128, 0], [64, 0, 128], [192, 0, 128],
[64, 128, 128], [192, 128, 128], [0, 64, 0], [128, 64, 0],
[0, 192, 0], [128, 192, 0], [0, 64, 128]]
# 将数据转换成tensor,并且做标准化处理
self.im_tfs = tfs.Compose([
tfs.ToTensor(),
tfs.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
])
# 将mat格式的数据转换成png格式
if (change == True):
self.mat2png()
self.image_name = []
self.label_name = []
self.readImage()
#print("%s->成功加载%d张图片" % (self.mode, len(self.image_name)))
"""
读取图片
图片的名称在/ImageSets/Segmentation/train.txt ans val.txt里
如果传入参数train为True,则读取train.txt的内容,否则读取val.txt的内容
图片都在./data/VOC2012/JPEGImages文件夹下面,需要在train.txt读取的每一行后面加上.jpg
标签都在./data/VOC2012/SegmentationClass文件夹下面,需要在读取的每一行后面加上.png
最后返回记录图片路径的集合data和记录标签路径集合的label
"""
# 读取图像和标签信息
def readImage(self):
img_root = prefix + "JPEGImages/"
label_root = prefix + "SegmentationClass/"
if (self.mode == "train"):
with open(prefix + "ImageSets/Segmentation/train.txt", "r") as f:
list_dir = f.readlines()
elif (self.mode == "val"):
with open(prefix + "ImageSets/Segmentation/val.txt", "r") as f:
list_dir = f.readlines()
for item in list_dir:
self.image_name.append(img_root + item.split("\n")[0] + ".jpg")
self.label_name.append(label_root + item.split("\n")[0] + ".png")
# 数据处理,输入Image对象,返回tensor对象
def data_process(self, img, img_gt):
if (self.mode == "train"):
# 以50%的概率左右翻转
a = random.random()
if (a > 0.5):
img = img.transpose(Image.FLIP_LEFT_RIGHT)
img_gt = img_gt.transpose(Image.FLIP_LEFT_RIGHT)
# 以50%的概率上下翻转
a = random.random()
if (a > 0.5):
img = img.transpose(Image.FLIP_TOP_BOTTOM)
img_gt = img_gt.transpose(Image.FLIP_TOP_BOTTOM)
# 以50%的概率像素矩阵转置
a = random.random()
if (a > 0.5):
img = img.transpose(Image.TRANSPOSE)
img_gt = img_gt.transpose(Image.TRANSPOSE)
a = random.random()
# 进行随机裁剪
width, height = img.size
st = random.randint(0, 20)
box = (st, st, width - 1, height - 1)
img = img.crop(box)
img_gt = img_gt.crop(box)
img = img.resize((CROP, CROP))
img_gt = img_gt.resize((CROP, CROP))
img = self.im_tfs(img)
img_gt = np.array(img_gt)
img_gt = torch.from_numpy(img_gt)
return img, img_gt
def add_noise(self, img, gama=0.2):
noise = torch.randn(img.shape[0], img.shape[1], img.shape[2])
noise = noise * gama
img = img + noise
return img
# 重载getitem函数,使类可以迭代
def __getitem__(self, idx):
# idx = 100
img = Image.open(self.image_name[idx])
img_gt = Image.open(self.label_name[idx])
img, img_gt = self.data_process(img, img_gt)
# img = self.add_noise(img)
return img, img_gt
def __len__(self):
return len(self.image_name)
# 将mat数据转换成png
def mat2png(self, dataDir=None, outputDir=None):
if (dataDir == None):
dataroot = prefix + "cls/"
else:
dataroot = dataDir
if (outputDir == None):
outroot = prefix + "SegmentationClass/"
else:
outroot = outputDir
list_dir = os.listdir(dataroot)
for item in list_dir:
matimg = scio.loadmat(dataroot + item)
mattmp = matimg["GTcls"]["Segmentation"]
# 将mat转换成png
# print(mattmp[0][0])
new_im = Image.fromarray(mattmp[0][0])
print(outroot + item[:-4] + ".png")
new_im.save(outroot + item[:-4] + ".png")
if __name__ == "__main__":
data_train = PASCAL_BSD("train")
data_val = PASCAL_BSD("val")
train_data = torch.utils.data.DataLoader(data_train, batch_size=16, shuffle=True)
val_data = torch.utils.data.DataLoader(data_val, batch_size=16, shuffle=False)
for item in val_data:
img, img_gt = item
print(img.shape)
print(img_gt.shape)model:存放网络模型
#fcn_res101.py
import torch
import torch.nn as nn
import torchvision.models as models
class FCN(nn.Module):
def __init__(self, out_channel=21):
super(FCN, self).__init__()
#self.backbone = models.resnet101(pretrained=True) #旧版本写法
self.backbone = models.resnet101(weights = models.ResNet101_Weights.IMAGENET1K_V1)
# 4倍下采样 256
self.stage1 = nn.Sequential(*list(self.backbone.children())[:-5])
# 8倍下采样 512
self.stage2 = nn.Sequential(list(self.backbone.children())[-5])
# 16倍下采样 1024
self.stage3 = nn.Sequential(list(self.backbone.children())[-4])
# 32倍下采样 2048
self.stage4 = nn.Sequential(list(self.backbone.children())[-3])
self.conv2048_256 = nn.Conv2d(2048, 256, 1)
self.conv1024_256 = nn.Conv2d(1024, 256, 1)
self.conv512_256 = nn.Conv2d(512, 256, 1)
self.upsample2x = nn.Upsample(scale_factor=2)
self.upsample8x = nn.Upsample(scale_factor=8)
self.outconv = nn.Conv2d(256, out_channel, kernel_size=3, stride=1, padding=1)
def forward(self, input):
output = self.stage1(input)
output_s8 = self.stage2(output)
output_s16 = self.stage3(output_s8)
output_s32 = self.stage4(output_s16)
output_s8 = self.conv512_256(output_s8)
output_s16 = self.conv1024_256(output_s16)
output_s32 = self.conv2048_256(output_s32)
output_s32 = self.upsample2x(output_s32)
output_s16 = output_s16 + output_s32
output_s16 = self.upsample2x(output_s16)
output_s8 = output_s8 + output_s16
output_s8 = self.upsample8x(output_s8)
final_output = self.outconv(output_s8)
return final_output
if __name__ == "__main__":
# 选择设备,有cuda用cuda,没有就用cpu
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
img = torch.rand(1, 3, 256, 256)
net = FCN()
output = net(img)
# 将网络拷贝到deivce中
net.to(device=device)
print(output.shape)
pred_pic:存放混淆矩阵可视化图片
try:存放测试某些函数功能的代码,可忽略
util:工具脚本
#log.py
import sys
class Logger():
def __init__(self, filename="log.txt"):
self.terminal = sys.stdout
self.log = open(filename, "w")
def write(self, message):
self.terminal.write(message)
self.log.write(message)
def flush(self):
pass
sys.stdout = Logger()
#utils.py
import torch
import numpy as np
import matplotlib.pyplot as plt
# 超参数,类别数量
class_num = 21
# 计算各种评价指标
# 计算混淆矩阵
def fast_hist(a, b, n):
"""
生成混淆矩阵hist
a 是形状为(HxW,)的预测标签值label_pred
b 是形状为(HxW,)的真实标签值label_true
n 是类别数
"""
a = torch.softmax(a, dim=1)
_ , a = torch.max(a, dim=1)
a = a.numpy()
b = b.numpy()
# k为掩膜,在和b相对应的索引的位置上填入true或者false
# b[k]会把mask中索引为true的元素输出
# (去除了255这些点(即标签图中的白色的轮廓),其中的b>=0是为了防止bincount()函数出错)
k = (b >= 0) & (b < n)
hist = np.bincount(n * b[k].astype(int) + a[k].astype(int), minlength=n ** 2).reshape(n, n)
#print(hist[20])
return hist
def per_class_iou(hist):
"""
hist传入混淆矩阵(n, n)
"""
# 因为下面有除法,防止分母为0的情况报错
np.seterr(divide="ignore", invalid="ignore")
# 交集:np.diag取hist的对角线元素
# 并集:hist.sum(1)和hist.sum(0)分别按两个维度相加,而对角线元素加了两次,因此减一次
iou = np.diag(hist) / (hist.sum(1) + hist.sum(0) - np.diag(hist))
# 把报错设回来
np.seterr(divide="warn", invalid="warn")
# 如果分母为0,结果是nan,会影响后续处理,因此把nan都置为0
iou[np.isnan(iou)] = 0.
return iou
def per_class_acc(hist):
"""
:param hist: 混淆矩阵
:return: 每类的acc和平均的acc
"""
np.seterr(divide="ignore", invalid="ignore")
acc_cls = np.diag(hist) / hist.sum(1)
np.seterr(divide="warn", invalid="warn")
acc_cls[np.isnan(acc_cls)] = 0.
return acc_cls
# 使用这个函数计算模型的各种性能指标
# 输入网络的输出值和标签值,得到计算结果
def get_MIoU(pred, label, hist):
"""
:param pred: 预测向量
:param label: 真实标签值
:return: 准确率,每类的准确率,每类的iou, miou
"""
hist = hist + fast_hist(pred, label, class_num)
# print(hist[20])
# 准确率
acc = np.diag(hist).sum() / hist.sum()
# 每类的准确率
acc_cls = per_class_acc(hist)
# 每类的iou
iou = per_class_iou(hist)
miou = np.nanmean(iou[1:])
return acc, acc_cls, iou, miou, hist
# 更新学习率
def getNewLR(LR, net):
LR = LR / 2
print("更新学习率LR=%.6f" % LR)
optimizer = torch.optim.Adam(net.parameters(), lr=LR, betas=(0.9, 0.999), eps=1e-08, weight_decay=0)
return optimizer, LR
# 绘制hist矩阵的可视化图并保存
def drawHist(hist, path):
# print(hist)
hist_ = hist[1:]
hist_tmp = np.zeros((class_num - 1, class_num - 1))
for i in range(len(hist_)):
hist_tmp[i] = hist_[i][1:]
# print(hist_tmp)
hist = hist_tmp
plt.matshow(hist)
plt.xlabel("Predicted label")
plt.ylabel("True label")
plt.axis("off")
# plt.colorbar()
# plt.show()
if (path != None):
plt.savefig(path)
#print("%s保存成功" % path)
if __name__ == "__main__":
#hist = np.random.randint(0, 20, size=(21, 21))
drawHist(hist, None)#zloss
import torch.nn.functional as F
from torch import nn
class CrossEntropy2d(nn.Module):
def __init__(self, ignore_label=255):
super().__init__()
self.ignore_label = ignore_label
def forward(self, predict, target):
"""
:param predict: [batch, num_class, height, width]
:param target: [batch, height, width]
:return: entropy loss
"""
target_mask = target != self.ignore_label # [batch, height, width]筛选出所有需要训练的像素点标签
target = target[target_mask] # [num_pixels]
batch, num_class, height, width = predict.size()
predict = predict.permute(0, 2, 3, 1) # [batch, height, width, num_class]
predict = predict[target_mask.unsqueeze(-1).repeat(1, 1, 1, num_class)].view(-1, num_class)
loss = F.cross_entropy(predict, target)
return lossVOCdevkit:数据集
VOC
提取码:ting
eval.py:计算测试集性能指标的代码
import torch
import torch.nn as nn
import model.fcn_res101 as fcn_res101
import util.utils as tools
import dataset.pascal_data as pascal_data
import time
import os
import numpy as np
import util.zloss as zl
BATCH = 8
class_num = 21
# 对整个验证集进行计算
def eval_val(net, criterion=None, show_step=False, epoch=0):
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
data_val = pascal_data.PASCAL_BSD("val")
# data_val = cityspaces.CITYSPACES("val")
val_data = torch.utils.data.DataLoader(data_val, batch_size=BATCH, shuffle=False)
net = net.to(device)
net = net.eval()
if (criterion == None):
criterion = zl.CrossEntropy2d()
loss_all = 0
acc = 0
acc_cls = 0
iou = 0
miou = 0
hist = np.zeros((class_num, class_num))
st_epoch = time.time()
for step, data in enumerate(val_data):
st_step = time.time()
img, img_gt = data
img = img.to(device)
img_gt = img_gt.to(device)
with torch.no_grad():
output = net(img)
# 计算各项性能指标
acc, acc_cls, iou, miou, hist = tools.get_MIoU(pred=output, label=img_gt, hist=hist)
"""
label_true = img_gt.cpu().numpy()
label_pred = torch.argmax(torch.softmax(output, dim=1), dim=1)
for lbt, lbp in zip(label_true, label_pred):
acc, acc_cls, miou, fwavacc = tools.label_accuracy_score(lbt, lbp, 21)
"""
# 计算损失值
loss = criterion(output, img_gt.long())
loss_all = loss_all + loss.item()
if (show_step == True):
print("(val)step[%d/%d]->loss:%.4f acc:%.4f miou:%.4f time:%ds" %
(step + 1, len(val_data), loss.item(), acc, miou, time.time() - st_epoch))
epoch_loss = loss_all / len(val_data)
epoch_acc = acc
epoch_miou = miou
#print("val->loss:%.4f acc:%.4f miou:%.4f time:%ds" %
# (epoch_loss, epoch_acc, epoch_miou, time.time() - st_epoch))
with open("iou_eval.txt", "a") as f:
f.write("epoch%d->" % (epoch) + str(iou) + "\n\n")
# 保存hist矩阵
Hist_path = "./pred_pic/epoch-%03d_val_hist.png" % (epoch)
tools.drawHist(hist, Hist_path)
return epoch_loss, epoch_acc, epoch_miou
# 将checkpoint文件夹中保存的模型都计算一遍
def eval_root():
list_dir = os.listdir("./checkpoint")
# net = PSPNet.PSPNet()
# net = FCN.FCN()
net = fcn_res101.FCN()
max_miou = -1
max_item = ""
for item in list_dir:
print(item)
net.load_state_dict(torch.load("./checkpoint/" + item))
epoch_loss, epoch_acc, epoch_miou = eval_val(net=net, show_step=False)
if (max_miou < epoch_miou):
max_miou = epoch_miou
max_item = item
print("max miou:%.4f item:%s" % (max_miou, max_item))
if __name__ == "__main__":
eval_root()
draw.py:绘制loss曲线(或其他各种指标曲线)
import matplotlib.pyplot as plt
file = open('log.txt') #打开文档
lines = file.readlines() #读取文档数据
#epoch = list(1, range(len(lines))+1) #epoch可以直接赋值,不放心的就用下面epoch的代码
epoch = []
train_loss = []
val_loss = []
for line in lines:
# split用于将每一行数据用自定义的符号(我用的是逗号)分割成多个对象
# 取分割后的第0列,转换成float格式后添加到epoch列表中
epoch.append(str(line.split(',')[0]))
# 取分割后的第2列,转换成float格式后添加到train_loss列表中
train_loss.append(float(line.split(',')[2]))
#取分割后的第8列,转换成float格式后添加到val_loss列表中
val_loss.append(float(line.split(',')[8]))
plt.figure()
plt.title('loss during training') #标题
plt.plot(epoch, train_loss, label="train_loss")
plt.plot(epoch, val_loss, label="valid_loss")
plt.legend()
plt.grid()
plt.show()
train.py:训练代码
import torch
import torch.nn as nn
# import model.PSPNet as PSPNet
# import model.DANet as DANet
# import model.fcn as FCN
import model.fcn_res101 as fcn_res101
import util.utils as tools
import dataset.pascal_data as pascal_data
# import dataset.cityspaces as cityspaces
import eval
import time
import numpy as np
import matplotlib.pyplot as plt
import util.zloss as zl
import util.log as logger
# 各种标签所对应的颜色
colormap = [[0, 0, 0], [128, 0, 0], [0, 128, 0], [128, 128, 0], [0, 0, 128],
[128, 0, 128], [0, 128, 128], [128, 128, 128], [64, 0, 0], [192, 0, 0],
[64, 128, 0], [192, 128, 0], [64, 0, 128], [192, 0, 128],
[64, 128, 128], [192, 128, 128], [0, 64, 0], [128, 64, 0],
[0, 192, 0], [128, 192, 0], [0, 64, 128]]
cm = np.array(colormap).astype("uint8")
#############
# 超参数设置 #
#############
BATCH = 10
LR = 5e-6
EPOCHES = 5
class_num = 21
WEIGHT_DECAY = 1e-4
def train(offset, model, lr_update=False, show_img=False):
# 加载网络
# net = PSPNet.PSPNet()
# net = DANet.DANet()
# net = FCN.fcn()
net = fcn_res101.FCN()
if (model != None):
net.load_state_dict(torch.load(model))
print(model)
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
net = net.to(device)
# 加载数据
data_train = pascal_data.PASCAL_BSD("train")
# data_train = cityspaces.CITYSPACES("train")
# data_val = pascal_data.PASCAL_BSD("val")
train_data = torch.utils.data.DataLoader(data_train, batch_size=BATCH, shuffle=True)
#val_data = torch.utils.data.DataLoader(data_val, batch_size=BATCH, shuffle=False)
# 损失函数
criterion = zl.CrossEntropy2d()
# 优化器
optimizer = torch.optim.Adam(net.parameters(), lr=LR, betas=(0.9, 0.999), eps=1e-08, weight_decay=WEIGHT_DECAY)
# optimizer = torch.optim.SGD(net.parameters(), lr=LR, weight_decay=1e-4)
learning_rate = LR
# 开始训练
#print("开始训练(〃'▽'〃)")
for epoch in range(EPOCHES):
# 总的损失值
loss_all = 0
# 评估的四个指标
acc = 0
acc_cls = 0
iou = 0
miou = 0
hist = np.zeros((class_num, class_num))
st_epoch = time.time()
net = net.train()
for step, data in enumerate(train_data):
st_step = time.time()
img, img_gt = data
img = img.to(device)
img_gt = img_gt.to(device)
# 前向传播
output = net(img)
# 计算各项性能指标
acc, acc_cls, iou, miou, hist = tools.get_MIoU(pred=output, label=img_gt, hist=hist)
# print(hist[20])
'''
label_true = img_gt.cpu().numpy()
label_pred = torch.argmax(torch.softmax(output, dim=1), dim=1)
for lbt, lbp in zip(label_true, label_pred):
acc, acc_cls, miou, fwavacc = tools.label_accuracy_score(lbt, lbp, 21)
'''
# 计算损失值
loss = criterion(output, img_gt.long())
loss_all = loss_all + loss.item()
# 反向传播更新网络
optimizer.zero_grad()
loss.backward()
optimizer.step()
if (show_img == True):
plt.subplot(1, 3, 1), plt.imshow(img.cpu().detach()[0].permute(1, 2, 0).numpy()), plt.axis("off")
plt.subplot(1, 3, 2), plt.imshow(cm[img_gt[0].detach().cpu().numpy()]), plt.axis("off")
plt.subplot(1, 3, 3)
_, idx = torch.max(torch.softmax(output, dim=1), dim=1)
plt.imshow(cm[idx[0].cpu().detach().numpy()]), plt.axis("off")
# plt.colorbar()
plt.show()
# 打印当前信息
#print("step[%d/%d]->loss:%.4f acc:%.4f miou:%.4f lr:%.6f time:%ds" %
# (step + 1, len(train_data), loss.item(), acc, miou, learning_rate, time.time() - st_epoch))
#print(iou)
# print(hist)
# 一个epoch训练完成,计算当前epoch数据
epoch_loss = loss_all / len(train_data)
epoch_acc = acc
epoch_miou = miou
#print(np.diag(hist))
# 打印信息
#print("epoch[%d/%d]->loss:%.4f acc:%.4f miou:%.4f lr:%.6f time:%ds" %
# (epoch+1, EPOCHES, epoch_loss, epoch_acc, epoch_miou, learning_rate, time.time() - st_epoch))
# 在验证集上计算
val_loss, val_acc, val_miou = eval.eval_val(net=net, criterion=criterion, epoch=epoch + offset)
print("epoch[%d/%d],train_loss,%.4f,train_acc,%.4f,train_miou,%.4f,eval_loss,%.4f,eval_acc,%.4f,eval_miou,%.4f,lr,%.6f,time,%ds" %
(epoch + 1, EPOCHES, epoch_loss, epoch_acc, epoch_miou, val_loss, val_acc, val_miou, learning_rate, time.time() - st_epoch))
# 保存当前训练数据
path = "./checkpoint/epoch-%03d_loss-%.4f_loss(val)-%.4f_acc-%.4f_miou-%.4f_miou(val)-%.4f.pth" % \
(epoch + offset, epoch_loss, val_loss, epoch_acc, epoch_miou, val_miou)
torch.save(net.state_dict(), path)
#print("成功保存模型%s" % (path))
with open("iou_train.txt", "a") as f:
f.write("epoch%d->" % (epoch + offset) + str(iou) + "\n\n")
with open("loss_train.txt", "a") as f:
f.write("epoch%d->" % (epoch + offset) + str(epoch_loss) + "\n")
# 保存hist矩阵
Hist_path = "./pred_pic/epoch-%03d_train_hist.png" % (epoch + offset)
tools.drawHist(hist, Hist_path)
# 更新学习率
if (lr_update == True):
# 每20个epoch就将学习率降低10倍
if (epoch + offset == 10):
learning_rate = 1e-5
optimizer = torch.optim.Adam(net.parameters(), lr=learning_rate, betas=(0.9, 0.999), eps=1e-08,
weight_decay=WEIGHT_DECAY)
print("当前学习率lr=%.8f" % (learning_rate))
if (epoch + offset == 20):
learning_rate = 5e-6
optimizer = torch.optim.Adam(net.parameters(), lr=learning_rate, betas=(0.9, 0.999), eps=1e-08,
weight_decay=WEIGHT_DECAY)
print("当前学习率lr=%.8f" % (learning_rate))
return 0
if __name__ == "__main__":
offset = 0
model = None
train(offset=offset, model=model, lr_update=False, show_img=False)
参考文章: