首先环境问题:
我原来使用ubuntu18.04,跑的,可以跑通orbslam2但是在两者进行结合的时候,总是出现“段错误”,在网上也查了很多解决方案,也没有解决,最后我换成了ubuntu14.04,装了相应的安装包,最终解决了段错误(也不算真正的解决,只是偶尔出现一次,我也是百思不得其解)
首先装pip,cmake,git等必要的包,安装这些包我参考的一些csdn链接如下:
(1条消息) ORB_SLAM2安装5大坑_老板,来首DJ的博客-CSDN博客![]() https://blog.csdn.net/LLABVIEW/article/details/124459615基础工具安装:
https://blog.csdn.net/LLABVIEW/article/details/124459615基础工具安装:
sudo apt-get install git
sudo apt-get install cmake
sudo apt-get install g++ gcc
安装pangolin0.5版本,切记是0.5,最新版不行,会有包冲突,
将其解压到unbuntu你喜欢的目录下:我的就直接放在/home/lyy下面了:
在文件夹下打开终端:也就是文件的根目录:
mkdir build
cd build
扫描二维码关注公众号,回复: 16569138 查看本文章
cmake .. CMAKE_BUILD_TYPE=Release
make
sudo make install
安装opencv3.4.12(这是我安装的版本)在安装opencv时,需要提前安装一下依赖包这个链接很齐全。
mkdir build
cd build
cmake .. CMAKE_BUILD_TYPE=Release
make
sudo make install
安装eigen3.2.10(这是我按照的版本)
同上:
mkdir build
cd build
cmake .. CMAKE_BUILD_TYPE=Release
make
sudo make install
环境到此安装好了。首先在此运行orbslam2,是否是成功的。
运行命令参数按照官网orbslam2给出即可:
./Examples/RGB-D/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUM3.yaml ~/桌面/dataset/TUM/rgbd_dataset_freiburg3_walking_halfsphere_change ~/桌面/dataset/TUM/rgbd_dataset_freiburg3_walking_halfsphere_change/associate_half.txt
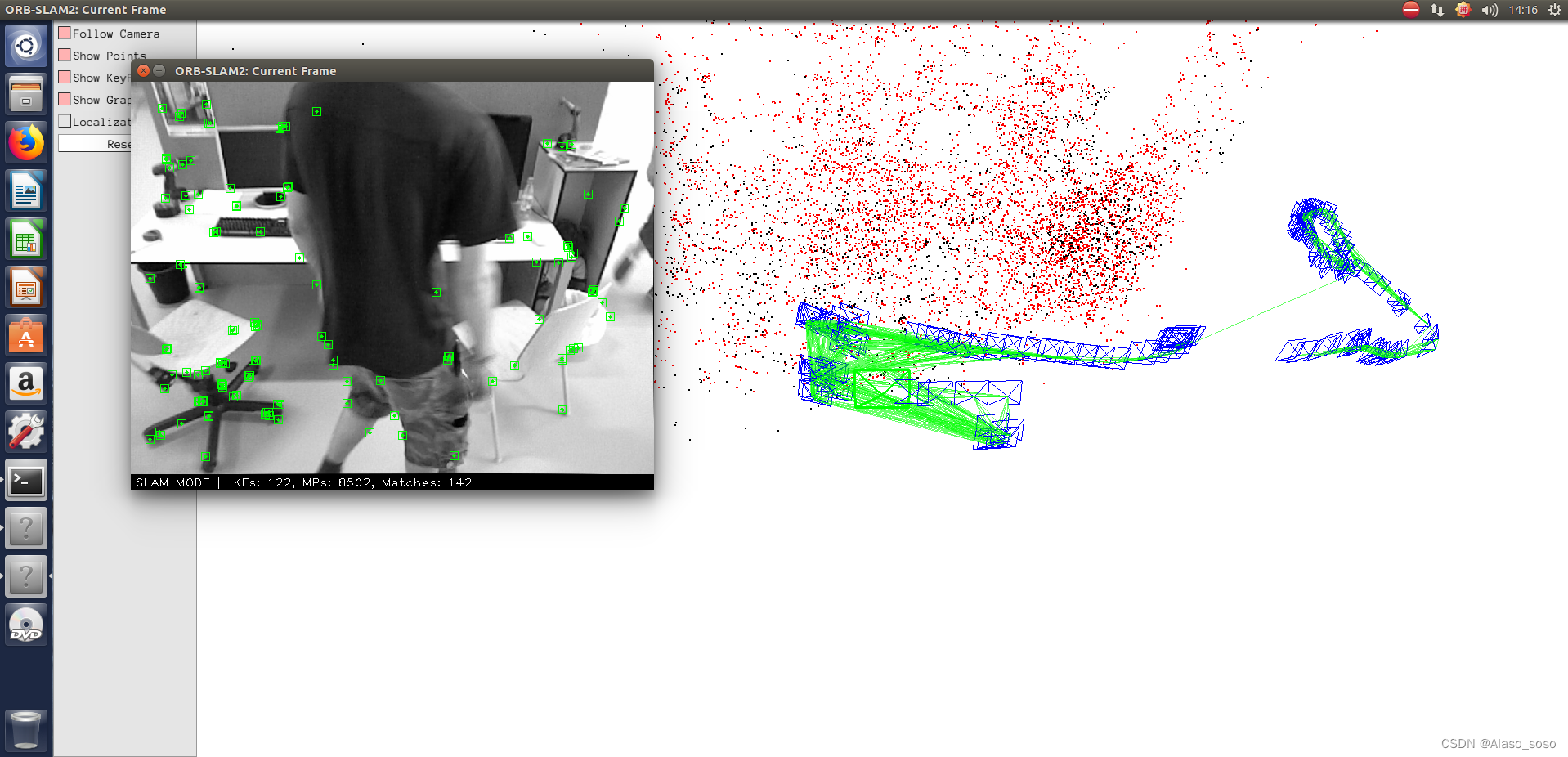
可以运行,接下来就开始运行orbslam2与yolov5的结合 :
./Examples/RGB-D/rgbd_tum Vocabulary/ORBvoc.txt Examples/RGB-D/TUM3.yaml ~/桌面/dataset/TUM/rgbd_dataset_freiburg3_walking_halfsphere_change ~/桌面/dataset/TUM/rgbd_dataset_freiburg3_walking_halfsphere_change/associate_half.txt detect_result/TUM_f3halfsphere_yolov5x/detect_result_s/

在运行rgbd_dataset_freiburg3_walking_halfsphere数据集时,存在一些问题,就是yolo detect_result fail.
主要解决方法是:输出detectresult的结果,看看slam需要什么类型的文件命名。我的如下:
strPathToDetectionResult:detect_result/TUM_f3halfsphere_yolov5x/detect_result_s/1341846464.438100.txt
将检测结果txt文件命名为如上格式就可以了。
但是可以运行了,又会出现问题,就是可能前期用yolo检测的图片时,并没有检测出object,于是就不存在相应的txt文件,所以此时,我是手动或者用识别效果更好的模型进行检测,将确实的文件生成,于是就运行成功了。
