1. 简介
- RK3588从入门到精通
- 本⽂介绍Linux操作gpio⽅法
- 开发板:ArmSoM-W3
2. GPIO配置
Rockchip Pin的ID按照 控制器(bank)+端口(port)+索引序号(pin) 组成
2.1 GPIO驱动介绍
驱动包括Pinctrl驱动( drivers/pinctrl/pinctrl-rockchip.c ) 和 GPIO驱动
( drivers/gpio/gpio-rockchip.c )
- Pinctrl驱动是主要驱动,提供IO的⽅法集
- GPIO驱动是完成 gpiochip 的功能,包括 GPIO 和 IRQ
2.2 GPIO复用
RK3588有5个GPIO控制器,每个控制器可以控制32个IO,作为GPIO功能时,端口⾏为由GPIO控制器寄存器配置
- 控制器和GPIO控制器数量⼀致
- 端口固定 A、B、C和D
- 索引序号固定 0、1、2、3、4、5、6、7
同⼀个控制器如果存在多种复⽤引脚,⼀般叫做m0、m1、m2等等,比如PWM功能:
pwm1 {
/omit-if-no-ref/
pwm1m0_pins: pwm1m0-pins {
rockchip,pins =
/* pwm1_m0 */
<0 RK_PC0 3 &pcfg_pull_none>;
};
/omit-if-no-ref/
pwm1m1_pins: pwm1m1-pins {
rockchip,pins =
/* pwm1_m1 */
<1 RK_PD3 11 &pcfg_pull_none>;
};
/omit-if-no-ref/
pwm1m2_pins: pwm1m2-pins {
rockchip,pins =
/* pwm1_m2 */
<1 RK_PA3 11 &pcfg_pull_none>;
};
};
一个Pin脚可以复⽤成多种功能,比如pwm1的GPIO0-C0脚可以有以下脚的复用
PDM0_CLK0_M1/PWM1_M0/I2C2_SDA_M0/CAN0_RX_M0/SPI0_MOSI_M0/PCIE30X1_0_CLKREQN_M0/GPIO0_C0_d
2.3 DTS介绍
dts⼀般把pinctrl节点放在soc.dtsi,例如rk3588s.dtsi,⼀般位于最后⼀个节点,在这个文件中可以找到板子所有可以配置的功能引脚
aliases {
csi2dcphy0 = &csi2_dcphy0;
csi2dcphy1 = &csi2_dcphy1;
csi2dphy0 = &csi2_dphy0;
csi2dphy1 = &csi2_dphy1;
csi2dphy2 = &csi2_dphy2;
dsi0 = &dsi0;
dsi1 = &dsi1;
ethernet1 = &gmac1;
gpio0 = &gpio0;
gpio1 = &gpio1;
gpio2 = &gpio2;
gpio3 = &gpio3;
gpio4 = &gpio4;
i2c0 = &i2c0;
i2c1 = &i2c1;
i2c2 = &i2c2;
i2c3 = &i2c3;
i2c4 = &i2c4;
i2c5 = &i2c5;
i2c6 = &i2c6;
i2c7 = &i2c7;
i2c8 = &i2c8;
rkcif_mipi_lvds0= &rkcif_mipi_lvds;
rkcif_mipi_lvds1= &rkcif_mipi_lvds1;
rkcif_mipi_lvds2= &rkcif_mipi_lvds2;
rkcif_mipi_lvds3= &rkcif_mipi_lvds3;
rkvenc0 = &rkvenc0;
rkvenc1 = &rkvenc1;
jpege0 = &jpege0;
jpege1 = &jpege1;
jpege2 = &jpege2;
jpege3 = &jpege3;
serial0 = &uart0;
serial1 = &uart1;
serial2 = &uart2;
serial3 = &uart3;
serial4 = &uart4;
serial5 = &uart5;
serial6 = &uart6;
serial7 = &uart7;
serial8 = &uart8;
serial9 = &uart9;
spi0 = &spi0;
spi1 = &spi1;
spi2 = &spi2;
spi3 = &spi3;
spi4 = &spi4;
spi5 = &sfc;
hdcp0 = &hdcp0;
hdcp1 = &hdcp1;
};
最后arch/arm64/boot/dts/rockchip/rk3588s-pinctrl.dtsi ⽂件通过include形式加到rk3588s.dtsi。
rk3588s-pinctrl.dtsi⽂件已经枚举了rk3588s芯⽚所有iomux的实例,各模块⼀般不再需要创建iomux实例;
创建iomux实例需要遵循如下规则:
- 必须在pinctrl节点下
- 必须以function+group的形式添加
- function+group的格式如下
function {
group {
rockchip,pin = <bank gpio func &ref>;
};
};
比如我添加如下gpio口的使用说明
&pinctrl {
leds {
led_rgb_b: led-rgb-b {
rockchip,pins = <0 RK_PB7 RK_FUNC_GPIO &pcfg_pull_none>;
};
};
hym8563 {
rtc_int: rtc-int {
rockchip,pins = <0 RK_PB0 RK_FUNC_GPIO &pcfg_pull_none>;
};
};
};
使用某一个gpio口的时候要注意是否有其他功能引用这个io口
2.3.1 修改gpio口
如果我们需要修改pwm1的默认脚gpio0c0为gpio1d3
pwm1: pwm@fd8b0010 {
compatible = "rockchip,rk3588-pwm", "rockchip,rk3328-pwm";
reg = <0x0 0xfd8b0010 0x0 0x10>;
#pwm-cells = <3>;
pinctrl-names = "active";
pinctrl-0 = <&pwm1m0_pins>;
clocks = <&cru 677>, <&cru 676>;
clock-names = "pwm", "pclk";
status = "disabled";
};
&pwm1 {
status = "okay";
};
&pwm1 {
pinctrl-0 = <&pwm1m1_pins>;
status = "okay";
};
2.3.2 配置某个GPIO电平
有个别需求是某个GPIO不属于某个特定模块,更多是某个电源开关,希望在系统开机后尽快输出⾼或低电平,使⽤"regulator-fixed",regulator-fixed通常⽤于定义电压固定的regulator,或由某个GPIO开关控制的regulator。
以MIPI屏幕电源使能为例,gpio口为gpio1c4
vcc_lcd_mipi1: vcc-lcd-mipi1 {
status = "okay";
compatible = "regulator-fixed";
regulator-name = "vcc_lcd_mipi1";
gpio = <&gpio1 RK_PC4 GPIO_ACTIVE_HIGH>;
enable-active-high;
regulator-boot-on;
regulator-state-mem {
regulator-off-in-suspend;
};
};
3. Linux下控制GPIO
编译内核的时候加入 Device Drivers-> GPIO Support ->/sys/class/gpio/… (sysfs interface)。
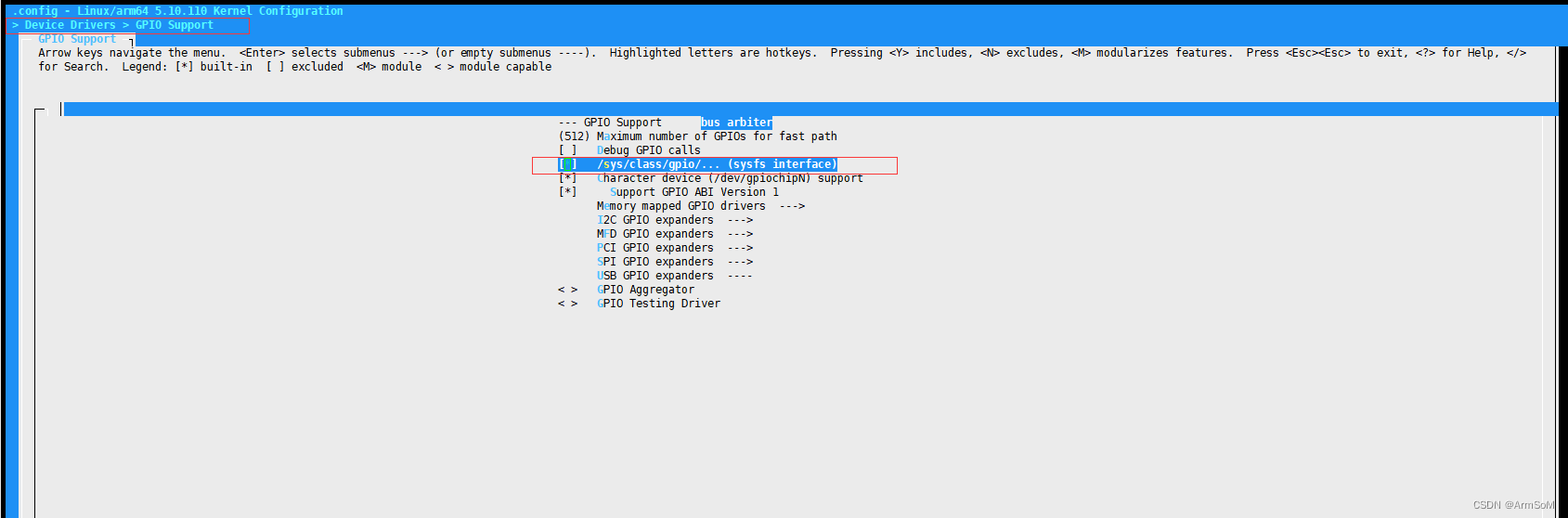
通过sysfs方式控制GPIO,先访问/sys/class/gpio目录,向export文件写入GPIO编号,使得该GPIO的操作接口从内核空间暴露到用户空间,GPIO的操作接口包括direction和value等,direction控制GPIO方向,而value可控制GPIO输出或获得GPIO输入
/sys/class/gpio 的使用说明可以参考这篇文章:linux系统基于syfs控制gpio
文件IO方式操作GPIO,使用到了4个函数open、close、read、write。以下是一个简单的基于 C 语言的流水灯和呼吸灯效果的示例代码。这个示例代码使用的是 Linux 上的用户空间 GPIO 控制,你需要适配代码以使用正确的 GPIO 引脚和路径。
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <fcntl.h>
#include <string.h>
#define LED_NUM 4
// GPIO 控制的相关路径
#define SYSFS_GPIO_EXPORT "/sys/class/gpio/export"
#define SYSFS_GPIO_DIR_PREFIX "/sys/class/gpio/gpio"
#define SYSFS_GPIO_VALUE_SUFFIX "/value"
// 设置 GPIO 方向
void set_gpio_direction(int gpio, const char *dir) {
char gpio_path[50];
sprintf(gpio_path, "%s%d/direction", SYSFS_GPIO_DIR_PREFIX, gpio);
int fd = open(gpio_path, O_WRONLY);
if (fd == -1) {
perror("Error opening direction file");
exit(EXIT_FAILURE);
}
write(fd, dir, strlen(dir));
close(fd);
}
// 控制 GPIO 输出
void set_gpio_value(int gpio, int value) {
char gpio_path[50];
sprintf(gpio_path, "%s%d/value", SYSFS_GPIO_DIR_PREFIX, gpio);
int fd = open(gpio_path, O_WRONLY);
if (fd == -1) {
perror("Error opening value file");
exit(EXIT_FAILURE);
}
char str_value = value ? '1' : '0';
write(fd, &str_value, 1);
close(fd);
}
int main() {
int leds[LED_NUM] = {17, 18, 19, 20}; // 假设使用的 GPIO 引脚编号
int i, j;
for (i = 0; i < LED_NUM; i++) {
// 导出 GPIO
int export_fd = open(SYSFS_GPIO_EXPORT, O_WRONLY);
if (export_fd == -1) {
perror("Error opening export file");
return EXIT_FAILURE;
}
char gpio_str[3];
sprintf(gpio_str, "%d", leds[i]);
write(export_fd, gpio_str, strlen(gpio_str));
close(export_fd);
// 设置 GPIO 方向为输出
set_gpio_direction(leds[i], "out");
}
while (1) {
// 流水灯效果
for (i = 0; i < LED_NUM; i++) {
set_gpio_value(leds[i], 1);
usleep(200000);
set_gpio_value(leds[i], 0);
}
// 呼吸灯效果
for (j = 0; j < 100; j++) {
for (i = 0; i < LED_NUM; i++) {
set_gpio_value(leds[i], 1);
usleep(j * j);
}
for (i = 0; i < LED_NUM; i++) {
set_gpio_value(leds[i], 0);
usleep(j * j);
}
}
}
return 0;
}
上述代码示例仅为参考,实际使用时需要根据你的硬件和系统配置进行适当修改和测试。