参考:Linux之I2C驱动_linux i2c驱动_风间琉璃•的博客-CSDN博客
目录
一、I2C驱动框架简介
在 Linux 内核中 I2C 的体系结构分为 3 个部分:
- I2C 核心: I2C 核心提供了 I2C 总线驱动和设备驱动的注册、 注销方法
- I2C 总线驱动: I2C 总线驱动是对 I2C 硬件体系结构中适配器端的实现, 适配器可由CPU 控制, 甚至可以直接集成在 CPU 内部。I2C 总线驱动就是 SOC 的 I2C 控制器驱动,也叫做 I2C 适配器驱动。
- I2C 设备驱动: I2C 设备驱动是对 I2C 硬件体系结构中设备端的实现, 设备一般挂接在受 CPU 控制的 I2C 适配器上, 通过 I2C 适配器与 CPU 交换数据。
1.1 I2C总线驱动
I2C 总线和 platform 总线类似, 区别在于platform 总线是虚拟的一条总线, 而 I2C 总线是实际
存在的。 对于使用 I2C 通信的设备, 在驱动中直接使用 I2C 总结即可。 I2C 总线驱动的重点是 I2C 适配器驱动, 主要涉及到两个结构体: i2c_adapter 和 i2c_algorithm。 在 Linux 内核中用 i2c_adapter 结构体来表示 I2C 适配器。 i2c_adapter 结构体定义在 include/linux/i2c.h 文件中
struct i2c_adapter {
struct module *owner;
unsigned int class; /* classes to allow probing for */
const struct i2c_algorithm *algo; /* 总线访问算法 */
void *algo_data;
/* data fields that are valid for all devices */
struct rt_mutex bus_lock;
int timeout; /* in jiffies */
int retries;
struct device dev; /* the adapter device */
int nr;
char name[48];
struct completion dev_released;
struct mutex userspace_clients_lock;
struct list_head userspace_clients;
struct i2c_bus_recovery_info *bus_recovery_info;
const struct i2c_adapter_quirks *quirks;
};i2c_algorithm 类型的指针变量algo, 对于一个 I2C 适配器, 要对外提供读写 API 函数, 设备驱动程序可以使用这些 API 函数来完成读写操作。 i2c_algorithm 是 I2C 适配器与 IIC 设备进行通信的方法。i2c_algorithm 结构体定义在 include/linux/i2c.h 文件中
struct i2c_algorithm
{
......
int (*master_xfer)(struct i2c_adapter *adap,struct i2c_msg *msgs,int num);
int (*smbus_xfer) (struct i2c_adapter *adap, u16 addr,
unsigned short flags, char read_write,
u8 command, int size, union i2c_smbus_data *data);
/* To determine what the adapter supports */
u32 (*functionality) (struct i2c_adapter *);
......
};一般 SOC 的 I2C 总线驱动都是由半导体厂商编写的,所以大多数只要专注于 I2C 设备驱动即可。
1.2 I2C设备驱动
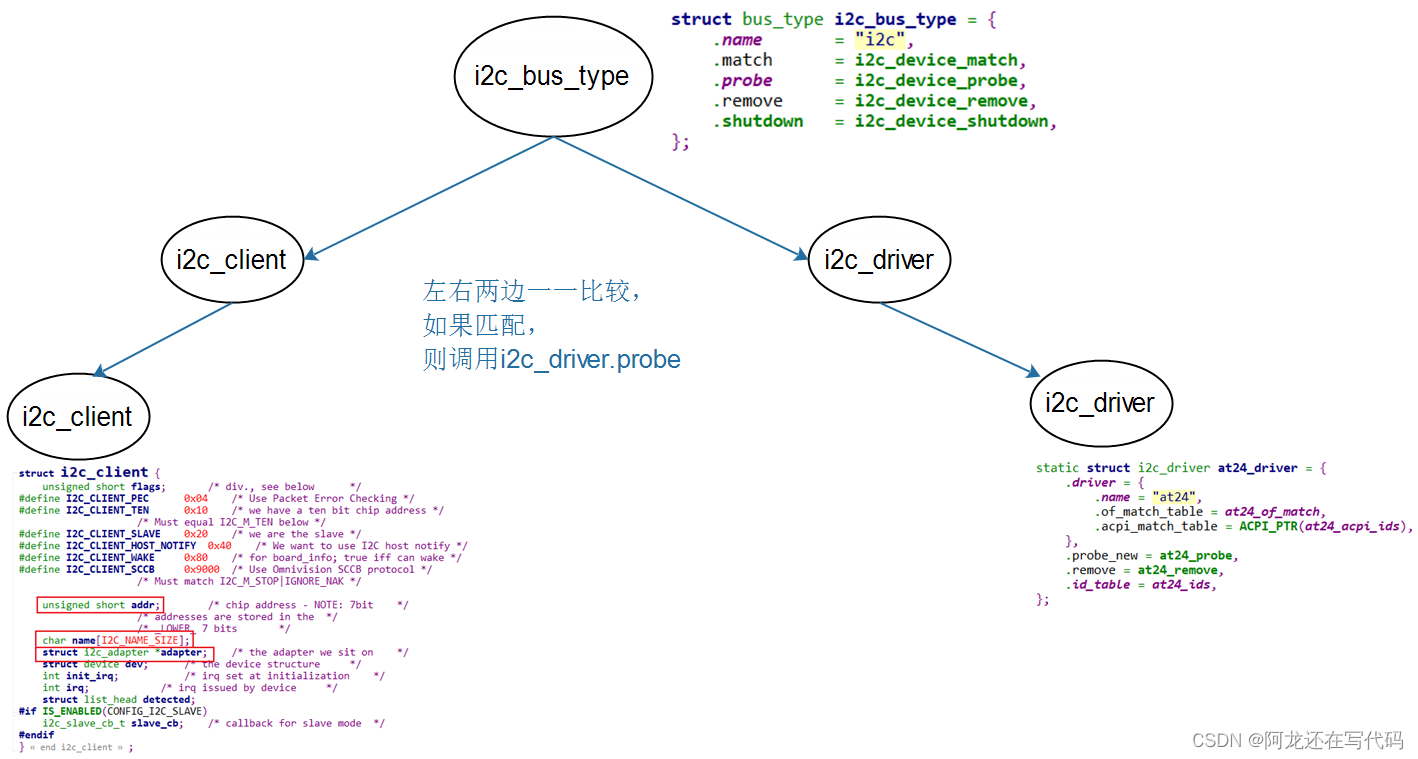
在 I2C 设备驱动中主要有两个重要的结构体: i2c_client 和 i2c_driver。 i2c_client 是描述设备信息的,i2c_driver 描述驱动内容。
当驱动和设备匹配成功后,每检测到一个 I2C 设备就会给这个 I2C 设备分配一个i2c_client,这个ic_client存储着这个设备的所有信息,如芯片地址。i2c_client 结构体定义在include/linux/i2c.h 文件中
struct i2c_client {
unsigned short flags; /* 标志 */
unsigned short addr; /* 芯片地址, 7 位,存在低 7 位*/
......
char name[I2C_NAME_SIZE]; /* 名字 */
struct i2c_adapter *adapter; /* 对应的 I2C 适配器 */
struct device dev; /* 设备结构体 */
int irq; /* 中断 */
struct list_head detected;
......
};i2c_driver 类似 platform_driver,是编写 I2C 设备驱动重点要处理的内容, i2c_driver 结构体定义在 include/linux/i2c.h 文件中
struct i2c_driver {
unsigned int class;
/* Notifies the driver that a new bus has appeared. You should
* avoid using this, it will be removed in a near future.
*/
int (*attach_adapter)(struct i2c_adapter *) __deprecated;
/* Standard driver model interfaces */
int (*probe)(struct i2c_client *, const struct i2c_device_id *);
int (*remove)(struct i2c_client *);
/* driver model interfaces that don't relate to enumeration */
void (*shutdown)(struct i2c_client *);
/* Alert callback, for example for the SMBus alert protocol.
* The format and meaning of the data value depends on the
* protocol.For the SMBus alert protocol, there is a single bit
* of data passed as the alert response's low bit ("eventflag"). */
void (*alert)(struct i2c_client *, unsigned int data);
/* a ioctl like command that can be used to perform specific
* functions with the device.
*/
int (*command)(struct i2c_client *client, unsigned int cmd,void *arg);
struct device_driver driver;
const struct i2c_device_id *id_table;
/* Device detection callback for automatic device creation */
int (*detect)(struct i2c_client *, struct i2c_board_info *);
const unsigned short *address_list;
struct list_head clients;
};当 I2C 设备和驱动匹配成功以后 probe 函数就会执行。device_driver 驱动结构体,如果使用设备树,需要设置 device_driver 的of_match_table 成员变量,即驱动的兼容(compatible)性。 未使用设备树的设备需要设置id_table 设备匹配 ID 表。
构造i2c_driver结构体,里面会表明支持那些设备,入口函数里注册i2c_driver结构体,如果i2c_driver发现能够支持的i2c_client的话,probe函数就被调用,在probe函数里记录client信息、注册字符设备、注册file_operations、自动创建设备节点
I2C驱动程序与普通的字符设备驱动程序没有本质差别,唯一差别:发起数据传输时用到i2c_transfer,该函数需要用到适配器(i2c控制器),probe函数被调用时内核会传入i2c_client,i2c_client里含有i2c控制器。
二、I2C总线-设备-驱动模型
2.1 i2c_driver
2c_driver表明能支持哪些设备:
-
使用of_match_table来判断
-
设备树中,某个I2C控制器节点下可以创建I2C设备的节点
-
如果I2C设备节点的compatible属性跟of_match_table的某项兼容,则匹配成功
-
-
i2c_client.name跟某个of_match_table[i].compatible值相同,则匹配成功
-
-
使用id_table来判断
-
i2c_client.name跟某个id_table[i].name值相同,则匹配成功
-
i2c_driver跟i2c_client匹配成功后,就调用i2c_driver.probe函数。
/* 传统匹配方式 ID 列表 */
static const struct i2c_device_id xxx_id[] = {
{"xxx", 0},
{}
};
/* 设备树匹配列表 */
static const struct of_device_id xxx_of_match[] = {
{ .compatible = "xxx" },
{ /* Sentinel */ }
};
/* i2c 驱动结构体 */
static struct i2c_driver xxx_driver = {
.probe = xxx_probe,
.remove = xxx_remove,
.driver = {
.owner = THIS_MODULE,
.name = "xxx",
.of_match_table = xxx_of_match, //使用设备树
},
.id_table = xxx_id, //未使用设备树
};2.2 i2c_client
i2c_client表示一个I2C设备,创建i2c_client的方法有4种:
(1)方法1:通过设备树来创建(常用)
i2c1: i2c@400a0000 {
/* ... master properties skipped ... */
clock-frequency = <100000>;
flash@50 {
compatible = "atmel,24c256";
reg = <0x50>;
};
pca9532: gpio@60 {
compatible = "nxp,pca9532";
gpio-controller;
#gpio-cells = <2>;
reg = <0x60>;
};
};向 i2c1 添加 flash 子节点,flash@50是子节点名字, @后面的50是I2C 器件地址。compatible 属性值为atmel,24c256。reg属性也是设置I2C的器件地址的。I2C 设备节点的创建主要是 compatible 属性和 reg属性的设置, 一个用于匹配驱动, 一个用于设置器件地址。
(2)方法2:
有时候无法知道该设备挂载哪个I2C bus下,无法知道它对应的I2C bus number。 但是可以通过其他方法知道对应的i2c_adapter结构体。 可以使用下面两个函数来创建i2c_client:
i2c_new_device
static struct i2c_board_info sfe4001_hwmon_info = {
I2C_BOARD_INFO("max6647", 0x4e),
};
int sfe4001_init(struct efx_nic *efx)
{
(...)
efx->board_info.hwmon_client =
i2c_new_device(&efx->i2c_adap, &sfe4001_hwmon_info);
(...)
}i2c_new_probed_device
static const unsigned short normal_i2c[] = { 0x2c, 0x2d, I2C_CLIENT_END };
static int usb_hcd_nxp_probe(struct platform_device *pdev)
{
(...)
struct i2c_adapter *i2c_adap;
struct i2c_board_info i2c_info;
(...)
i2c_adap = i2c_get_adapter(2);
memset(&i2c_info, 0, sizeof(struct i2c_board_info));
strscpy(i2c_info.type, "isp1301_nxp", sizeof(i2c_info.type));
isp1301_i2c_client = i2c_new_probed_device(i2c_adap, &i2c_info,
normal_i2c, NULL);
i2c_put_adapter(i2c_adap);
(...)
}差别:
-
i2c_new_device:会创建i2c_client,即使该设备并不存在
-
i2c_new_probed_device:
-
它成功的话,会创建i2c_client,并且表示这个设备肯定存在
-
I2C设备的地址可能发生变化,比如AT24C02的引脚A2A1A0电平不一样时,设备地址就不一样
-
可以罗列出可能的地址
-
i2c_new_probed_device使用这些地址判断设备是否存在
-
(3)方法3(不推荐):由i2c_driver.detect函数来判断是否有对应的I2C设备并生成i2c_client
(4)方法4:通过用户空间(user-space)生成 调试时、或者不方便通过代码明确地生成i2c_client时,可以通过用户空间来生成。
// 创建一个i2c_client, .name = "eeprom", .addr=0x50, .adapter是i2c-3
# echo eeprom 0x50 > /sys/bus/i2c/devices/i2c-3/new_device
// 删除一个i2c_client
# echo 0x50 > /sys/bus/i2c/devices/i2c-3/delete_device2.3 I2C 设备数据收发和处理
在 I2C 设备驱动中首先要完成 i2c_driver 结构体的创建、 初始化和注册, 当设备和驱动匹配成功后,就会执行 probe 函数, probe 函数中就是执行字符设备驱动的一套流程。
一般需要在probe函数里面初始化 I2C 设备,要初始化 I2C 设备需要使用 i2c_transfer 函数对 I2C 设备寄存器进行读写操作。 i2c_transfer 函数会调用 I2C 适配器中 i2c_algorithm里面的 master_xfer 函数, 对于 I.MX6U 而言是 i2c_imx_xfer 这个函数。
int i2c_transfer(struct i2c_adapter *adap,struct i2c_msg *msgs,int num)adap: 所使用的 I2C 适配器, i2c_client 会保存其对应的 i2c_adapter
msgs: I2C 要发送的一个或多个消息
num: 消息数量,msgs 的数量
返回值: 负值,失败,其他非负值,发送的 msgs 数量
msgs参数是一个 i2c_msg 类型的指针参数,Linux内核使用 i2c_msg 结构体 描述一个消息。
struct i2c_msg {
__u16 addr; /* 从机地址 */
__u16 flags; /* 标志 */
#define I2C_M_TEN 0x0010
#define I2C_M_RD 0x0001
#define I2C_M_STOP 0x8000
#define I2C_M_NOSTART 0x4000
#define I2C_M_REV_DIR_ADDR 0x2000
#define I2C_M_IGNORE_NAK 0x1000
#define I2C_M_NO_RD_ACK 0x0800
#define I2C_M_RECV_LEN 0x0400
__u16 len; /* 消息(本 msg)长度 */
__u8 *buf; /* 消息数据 */
};使用i2c_transfer函数发送数据前,要构建好 i2c_msg,使用 i2c_transfer 进行 I2C 数据收发的模板:
/* 设备结构体 */
struct xxx_dev {
......
void *private_data; /* 私有数据,一般会设置为 i2c_client */
};
/*
* @description : 读取 I2C 设备多个寄存器数据
* @param – dev : I2C 设备
* @param – reg : 要读取的寄存器首地址
* @param – val : 读取到的数据
* @param – len : 要读取的数据长度
* @return : 操作结果
*/
static int xxx_read_regs(struct xxx_dev *dev, u8 reg, void *val,
int len)
{
int ret;
struct i2c_msg msg[2];
struct i2c_client *client = (struct i2c_client *)
dev->private_data;
/* msg[0],第一条写消息,发送要读取的寄存器首地址 */
msg[0].addr = client->addr; /* I2C 器件地址 */
msg[0].flags = 0; /* 标记为发送数据 */
msg[0].buf = ® /* 读取的首地址 */
msg[0].len = 1; /* reg 长度 */
/* msg[1],第二条读消息,读取寄存器数据 */
msg[1].addr = client->addr; /* I2C 器件地址 */
msg[1].flags = I2C_M_RD; /* 标记为读取数据 */
msg[1].buf = val; /* 读取数据缓冲区 */
msg[1].len = len; /* 要读取的数据长度 */
ret = i2c_transfer(client->adapter, msg, 2);
if(ret == 2)
{
ret = 0;
}
else
{
ret = -EREMOTEIO;
}
return ret;
}
/*
* @description : 向 I2C 设备多个寄存器写入数据
* @param – dev : 要写入的设备结构体
* @param – reg : 要写入的寄存器首地址
* @param – buf : 要写入的数据缓冲区
* @param – len : 要写入的数据长度
* @return : 操作结果
*/
static s32 xxx_write_regs(struct xxx_dev *dev, u8 reg, u8 *buf,u8 len)
{
u8 b[256];
struct i2c_msg msg;
struct i2c_client *client = (struct i2c_client *)
dev->private_data;
b[0] = reg; /* 寄存器首地址 */
memcpy(&b[1],buf,len); /* 将要发送的数据拷贝到数组 b 里面 */
msg.addr = client->addr; /* I2C 器件地址 */
msg.flags = 0; /* 标记为写数据 */
msg.buf = b; /* 要发送的数据缓冲区 */
msg.len = len + 1; /* 要发送的数据长度 */
return i2c_transfer(client->adapter, &msg, 1);
}在设备结构体里面添加一个执行void的指针成员变量private_data,此成员变量用于保存设备的私有数据,在 I2C 设备驱动中一般将其指向 I2C 设备对应的i2c_client。

xxx_read_regs 函数用于读取 I2C 设备多个寄存器数据,然后定义了一个i2c_msg 数组, 2 个数组元素。如图,I2C写时序图,因为 I2C 读取数据的时候要先发送要读取的寄存器地址,然后再读取数据,所以需要准备两个 i2c_msg。一个用于发送寄存器地址,一个用于读取寄存器值。
对于 msg[0], 将 flags设置为 0, 表示写数据。 msg[0]的 addr 是 I2C 设备的器件地址, msg[0]的 buf 成员变量就是要读取的寄存器地址。 对于 msg[1], 将 flags 设置为 I2C_M_RD, 表示读取数据。 msg[1]的 buf 成员变量用于保存读取到的数据, len 成员变量就是要读取的数据长度。 调用 i2c_transfer 函数完成 I2C 数据读操作。

xxx_write_regs 函数用于向 I2C 设备多个寄存器写数据。 数组 b 用于存放寄存器首地址和要发送的数据,msg 的 addr设置为 I2C 器件地址。然后设置 msg 的 flags 为 0, 也就是写数据。设置要发送的数据, 也就是数组 b。设置 msg 的 len 为 len+1, 因为要加上一个字节的寄存器地址。 最后通过 i2c_transfer 函数完成向 I2C 设备的写操作。
另外还有两个API函数分别用于I2C数据的收发操作,这两个函数都会调用i2c_transfer。
I2C 数据发送函数 i2c_master_send:
int i2c_master_send(const struct i2c_client *client,const char *buf,int count)client: I2C 设备对应的 i2c_client
buf:要发送的数据
count: 要发送的数据字节数,要小于 64KB,以为 i2c_msg 的 len 成员变量是一个 u16(无
符号 16 位)类型的数据。
返回值: 负值,失败,其他非负值,发送的字节数
I2C 数据接收函数为 i2c_master_recv:
int i2c_master_recv(const struct i2c_client *client,char *buf,int count)client: I2C 设备对应的 i2c_client
buf:要接收的数据count: 要接收的数据字节数,要小于 64KB,以为 i2c_msg 的 len 成员变量是一个 u16(无
符号 16 位)类型的数据
返回值: 负值,失败,其他非负值,发送的字节数
三、Linux I2C驱动程序模板
i2c_drv.c
#include "linux/i2c.h"
#include <linux/module.h>
#include <linux/poll.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>
#include <linux/timer.h>
/* 主设备号 */
static int major = 0;
static struct class *my_i2c_class;
struct i2c_client *g_client;
static DECLARE_WAIT_QUEUE_HEAD(gpio_wait);
struct fasync_struct *i2c_fasync;
/* 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t i2c_drv_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{
int err;
struct i2c_msg msgs[2];
/* 初始化i2c_msg */
err = i2c_transfer(g_client->adapter, msgs, 2);
/* copy_to_user */
return 0;
}
static ssize_t i2c_drv_write(struct file *file, const char __user *buf, size_t size, loff_t *offset)
{
int err;
/* copy_from_user */
struct i2c_msg msgs[2];
/* 初始化i2c_msg */
err = i2c_transfer(g_client->adapter, msgs, 2);
return 0;
}
static unsigned int i2c_drv_poll(struct file *fp, poll_table * wait)
{
//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
poll_wait(fp, &gpio_wait, wait);
//return is_key_buf_empty() ? 0 : POLLIN | POLLRDNORM;
return 0;
}
static int i2c_drv_fasync(int fd, struct file *file, int on)
{
if (fasync_helper(fd, file, on, &i2c_fasync) >= 0)
return 0;
else
return -EIO;
}
/* 定义自己的file_operations结构体 */
static struct file_operations i2c_drv_fops = {
.owner = THIS_MODULE,
.read = i2c_drv_read,
.write = i2c_drv_write,
.poll = i2c_drv_poll,
.fasync = i2c_drv_fasync,
};
static int i2c_drv_probe(struct i2c_client *client,
const struct i2c_device_id *id)
{
// struct device_node *np = client->dev.of_node; 从client获取设备节点
// struct i2c_adapter *adapter = client->adapter; 从client获取控制器
/* 记录client */
g_client = client;
/* 注册字符设备 */
/* 注册file_operations */
major = register_chrdev(0, "100ask_i2c", &i2c_drv_fops); /* /dev/gpio_desc */
my_i2c_class = class_create(THIS_MODULE, "100ask_i2c_class");
if (IS_ERR(my_i2c_class)) {
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
unregister_chrdev(major, "100ask_i2c");
return PTR_ERR(my_i2c_class);
}
device_create(my_i2c_class, NULL, MKDEV(major, 0), NULL, "myi2c"); /* /dev/myi2c */
return 0;
}
static int i2c_drv_remove(struct i2c_client *client)
{
/* 反注册字符设备 */
device_destroy(my_i2c_class, MKDEV(major, 0));
class_destroy(my_i2c_class);
unregister_chrdev(major, "100ask_i2c");
return 0;
}
static const struct of_device_id myi2c_dt_match[] = {
{ .compatible = "100ask,i2cdev" },
{},
};
static struct i2c_driver my_i2c_driver = {
.driver = {
.name = "100ask_i2c_drv",
.owner = THIS_MODULE,
.of_match_table = myi2c_dt_match,
},
.probe = i2c_drv_probe,
.remove = i2c_drv_remove,
};
static int __init i2c_drv_init(void)
{
/* 注册i2c_driver */
return i2c_add_driver(&my_i2c_driver);
}
static void __exit i2c_drv_exit(void)
{
/* 反注册i2c_driver */
i2c_del_driver(&my_i2c_driver);
}
/* 7. 其他完善:提供设备信息,自动创建设备节点 */
module_init(i2c_drv_init);
module_exit(i2c_drv_exit);
MODULE_LICENSE("GPL");