硬件
C4MB开发板、杜邦线、AHT10。
一、AHT10简述
AHT10,新一代温湿度传感器在尺寸与智能方面建立了新的标准:它嵌入了适于回流焊的双列扁平无引脚SMD封装,底面4 x 5mm ,高度1.6mm。传感器输出经过标定的数字信号,标准I2C格式。
AHT10 配有一个全新设计的ASIC专用芯片、一个经过改进的MEMS半导体电容式湿度传感元件和一个标准的片上温度传感元件,其性能已经大大提升甚至超出了前一代传感器的可靠性水平,新一代温湿度传感器,经过改进使其在恶劣环境下的性能更稳定。
二、手册解析
-
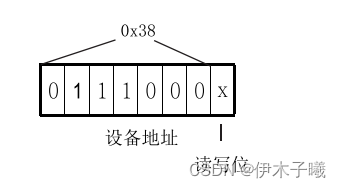
采用标准的ic协议进行通讯
-
设备地址0x38
-
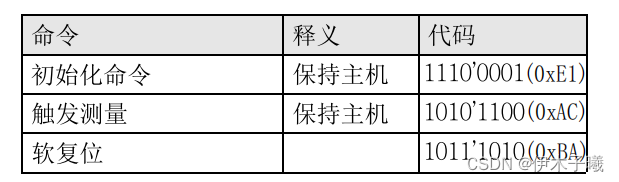
基本命令
-
状态位的说明
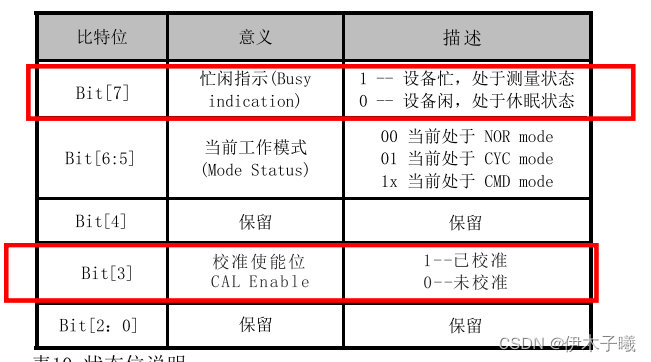
当前只需关注bit[3]和bit[7] -
读取流程
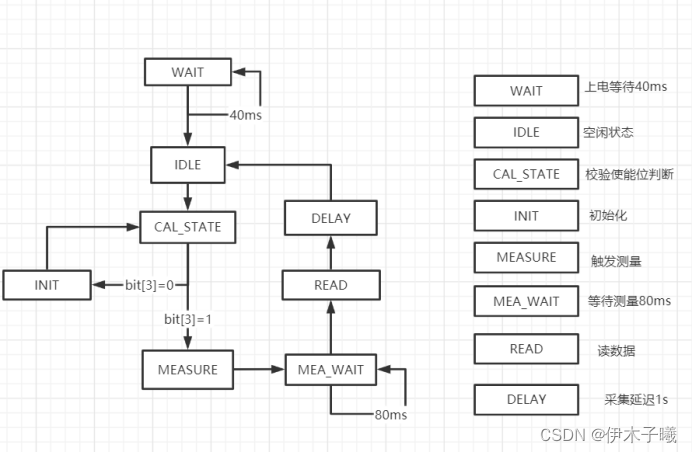
1.上电后要等待40ms,读取温湿度值之箭,首先要看状态字的校准使能位Bit[3]是否为1(通过发送0x71可以获取一个字节的状态字),如果不为1,要发送0XEi命令(初始化),此命令参数有两个字节,第一个字节为0x08,第二个字节为0x00。
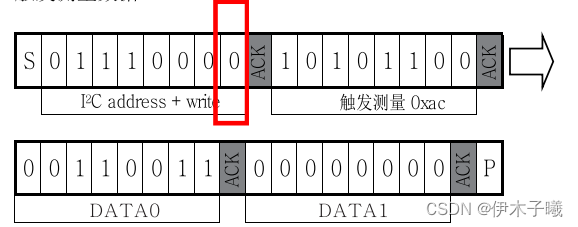
2.直接发送0xAC命令(触发测量),此命令参数有两个字节,第一个字节为0x33,第二个字节为0x00。
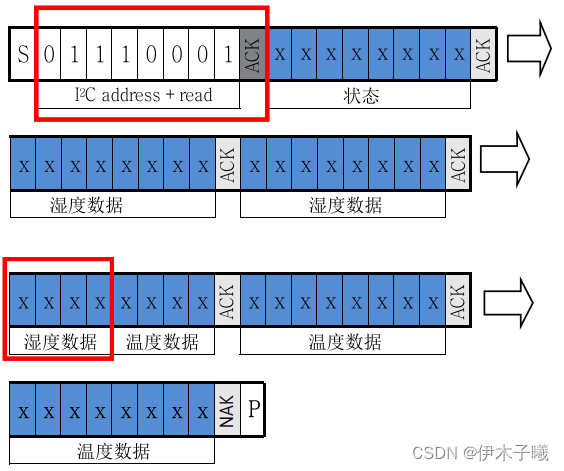
3.等待80ms待测量完成,忙状态Bit[7]为0,然后可以读取六个字节(发0X71即可以读取)。 -
发送
触发数据
初始化上同
读取数据
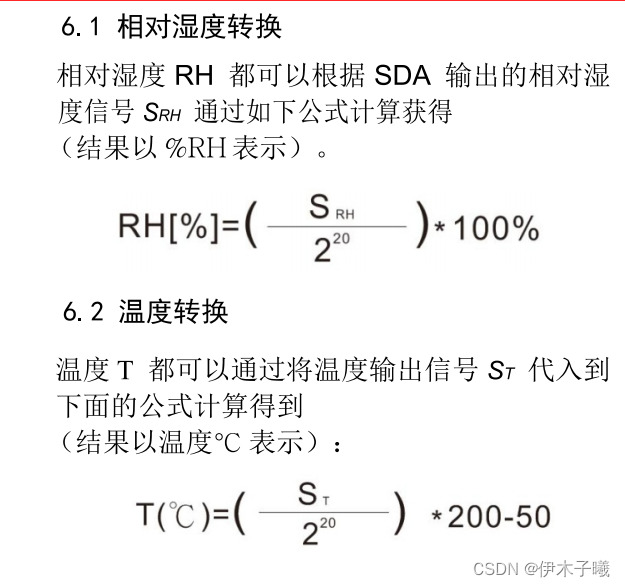
7. 数据处理
三、状态图设计
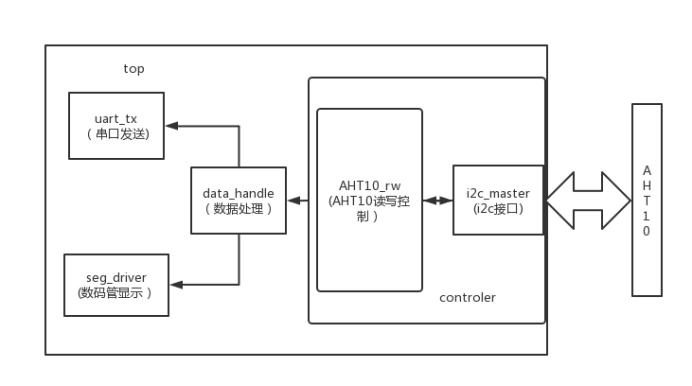
四、框架设计
五、代码设计
只展示了部分代码,如有需要私信
AHT10_rw
/*==============================*\
Author:mouer
Description: 温湿度传感器控制读写
Time: 2022.7.30
\*==============================*/
`include "param.v"
module AHT10_rw (
input clk ,
input rst_n ,
output [39:0] dout ,//温湿度
output reg dout_vld,
output req ,//操作使能
output [3:0] cmd ,//操作命令
output [7:0] wr_data ,//写数据
input [7:0] rd_data ,//读数据
input done //传输完成标志
);
//参数定义
localparam WAIT =8'b0000_0001,//上电等待40ms
IDLE =8'b0000_0010,//空闲状态
CAL_STATE=8'b0000_0100,//判断校验使能
INIT =8'b0000_1000,//初始化
MEASURE =8'b0001_0000,//触发测量
MEA_WAIT =8'b0010_0000,//等待测量80ms
READ =8'b0100_0000,//读温湿度
DELAY =8'b1000_0000;//延时读取
parameter T_40MS =21'd2_000_000,//40ms;
T_80MS =22'd4_000_000,
T_DELAY =28'd50_000_000;
//信号定义
//状态转移
reg [7:0] state_c;
reg [7:0] state_n;
//状态条件定义
wire wait2idle ;
wire idle2cal_state ;
wire init2cal_state ;
wire cal_state2init ;
wire cal_state2measure;
wire measure2mea_wait ;
wire mea_wait2read ;
wire read2delay ;
wire delay2idle ;
//等待时间计数
reg [27:0] cnt_ms ;
wire add_cnt_ms;
wire end_cnt_ms;
//字节计数
reg [4:0] cnt_byte ;
wire add_cnt_byte;
wire end_cnt_byte;
//task
reg req_r;
reg [3:0] cmd_r;
reg [7:0] data_r;
//温湿度数据
reg [39:0] data;
//flag1
reg flag;
reg [27:0] TIME;
//状态机
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
state_c<=WAIT;
end
else begin
state_c<=state_n;
end
end
always@(*)begin
case(state_c)
WAIT: begin
if(wait2idle)
state_n=IDLE;
else
state_n=state_c;
end
IDLE: begin
if(idle2cal_state)
state_n=CAL_STATE;
else
state_n=state_c;
end
INIT: begin
if(init2cal_state)
state_n=CAL_STATE;
else
state_n=state_c;
end
CAL_STATE:begin
if(cal_state2measure)
state_n=MEASURE;
else if(cal_state2init)
state_n=INIT;
else
state_n=state_c;
end
MEASURE: begin
if(measure2mea_wait)
state_n=MEA_WAIT;
else
state_n=state_c;
end
MEA_WAIT:begin
if(mea_wait2read)
state_n=READ;
else
state_n=state_c;
end
READ: begin
if(read2delay)
state_n=DELAY;
else
state_n=state_c;
end
DELAY: begin
if(delay2idle)
state_n=IDLE;
else
state_n=state_c;
end
default:state_n=WAIT ;
endcase
end
assign wait2idle =state_c==WAIT &&end_cnt_ms ;
assign idle2cal_state =state_c==IDLE &&1'b1 ;
assign init2cal_state =state_c==INIT &&end_cnt_byte&&done ;
assign cal_state2init =state_c==CAL_STATE&&end_cnt_byte&&~rd_data[3]&&done ;
assign cal_state2measure =state_c==CAL_STATE&&end_cnt_byte&&rd_data[3]&&done ;
assign measure2mea_wait =state_c==MEASURE &&end_cnt_byte&&done ;
assign mea_wait2read =state_c==MEA_WAIT &&end_cnt_ms ;
assign read2delay =state_c==READ &&end_cnt_byte&&done ;
assign delay2idle =state_c==DELAY &&end_cnt_ms ;
//flag
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
flag<=1'b0;
end
else begin
flag=rd_data&8'd8;
end
end
//等待时间计数40ms/80ms
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
cnt_ms<=1'b0;
end
else if(add_cnt_ms)begin
if(end_cnt_ms)begin
cnt_ms<=1'b0;
end
else begin
cnt_ms=cnt_ms+1'b1;
end
end
else begin
cnt_ms<=cnt_ms;
end
end
assign add_cnt_ms=state_c==WAIT||state_c==MEA_WAIT||state_c==DELAY;
assign end_cnt_ms=add_cnt_ms&&cnt_ms==TIME ;
always@(*)begin
if(state_c==WAIT)begin
TIME=T_40MS;
end
else if(state_c==MEA_WAIT)begin
TIME=T_80MS;
end
else if(state_c==DELAY)begin
TIME=T_DELAY;
end
else
TIME=0;
end
//字节计数
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
cnt_byte<=1'b0;
end
else if(add_cnt_byte)begin
if(end_cnt_byte)begin
cnt_byte<=1'b0;
end
else begin
cnt_byte<=cnt_byte+1'b1;
end
end
else begin
cnt_byte<=cnt_byte;
end
end
assign add_cnt_byte=(state_c==CAL_STATE||state_c==INIT ||state_c==MEASURE||state_c==READ)&&done;
assign end_cnt_byte=add_cnt_byte&&cnt_byte==(state_c==READ?7:4)-1;
//读写字节输出
always@(*)begin
// if(!rst_n)begin
// TX(1'b0,4'b0,8'b0);
// end
if(state_c==CAL_STATE)begin
case (cnt_byte)
0:TX(1'b1,{
`CMD_START|`CMD_WRITE},{
`I2C_ADR,`WR_BIT});//发起始位,发写控制字
1:TX(1'b1,{
`CMD_WRITE},`CMD_STATE);//发命令 0x71
2:TX(1'b1,{
`CMD_START|`CMD_WRITE},{
`I2C_ADR,`RD_BIT});发起始位,发读控制字
3:TX(1'b1,{
`CMD_READ|`CMD_STOP},0);//读数据,发停止位
default: TX(1'b0,{
`CMD_READ},0);//
endcase
end
else if(state_c==INIT)begin
case(cnt_byte)
0:TX(1'b1,{
`CMD_START|`CMD_WRITE},{
`I2C_ADR,`WR_BIT});//发起始位,发写控制字
1:TX(1'b1,{
`CMD_WRITE},`CMD_INIT);//发命令 0xE1
2:TX(1'b1,{
`CMD_WRITE},{
`CMD_INIT_1});//发init参数第一字节
3:TX(1'b1,{
`CMD_WRITE|`CMD_STOP},{
`CMD_INIT_2});//发init参数第二字节,发停止位
default: TX(1'b0,{
`CMD_READ},0);
endcase
end
else if(state_c==MEASURE)begin
case(cnt_byte)
0:TX(1'b1,{
`CMD_START|`CMD_WRITE},{
`I2C_ADR,`WR_BIT});//发起始位,发写控制字
1:TX(1'b1,{
`CMD_WRITE},`CMD_MEA);//发命令 0xAC
2:TX(1'b1,{
`CMD_WRITE},{
`CMD_MEA_1});//发init参数第一字节
3:TX(1'b1,{
`CMD_WRITE|`CMD_STOP},{
`CMD_MEA_2});//发init参数第二字节,发停止位
default: TX(1'b0,{
`CMD_READ},0);
endcase
end
else if(state_c==READ)begin
case (cnt_byte)
// 0:TX(1'b1,{`CMD_START|`CMD_WRITE},{`I2C_ADR,`WR_BIT});//发起始位,发写控制字
// 1:TX(1'b1,{`CMD_WRITE},`CMD_STATE);//发命令 0x71
0:TX(1'b1,{
`CMD_START| `CMD_WRITE},{
`I2C_ADR,`RD_BIT});发起始位,发读控制字
1:TX(1'b1,{
`CMD_READ},0);//读数据 读状态
2:TX(1'b1,{
`CMD_READ},0);//读数据 湿度数据
3:TX(1'b1,{
`CMD_READ},0);//读数据 湿度数据
4:TX(1'b1,{
`CMD_READ},0);//读数据 湿度 温度数剧
5:TX(1'b1,{
`CMD_READ},0);//读数据 温度数据
6:TX(1'b1,{
`CMD_READ|`CMD_STOP},0);//读数据 温度数据,发停止位
default: TX(1'b0,{
`CMD_READ},0);//读
endcase
end
else begin
TX(1'b0,cmd_r,data_r);
end
end
//任务
task TX;
input req1;
input [3:0] cmd1;
input [7:0] data1;
begin
req_r=req1;
cmd_r=cmd1;
data_r=data1;
end
endtask
//接收数据
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
data<=40'd0;
end
else if(state_c==READ&&done&&cnt_byte>1&&cnt_byte<7)begin
data<={
data[31:0],rd_data};
end
else begin
data<=data;
end
end
always@(posedge clk,negedge rst_n)begin
if(!rst_n)begin
dout_vld<=1'b0;
end
else if(state_c==READ&&done&&end_cnt_byte)begin
dout_vld<=1'b1;
end
else begin
dout_vld<=1'b0;
end
end
//输出
assign dout=data;
// assign dout_vld=state_c==READ&&done&&end_cnt_byte;
assign req=req_r;
assign cmd=cmd_r;
assign wr_data=data_r;
endmodule
数据处理
assign humi = ((data[39:20] << 9)
+(data[39:20] << 8)
+(data[39:20] << 7)
+(data[39:20] << 6)
+(data[39:20] << 5)
+(data[39:20] << 3)) >> 20;
assign temp = (((data[19:0] << 10)
+(data[19:0] << 9)
+(data[19:0] << 8)
+(data[19:0] << 7)
+(data[19:0] << 6)
+(data[19:0] << 4))>> 20 ) - 500;
六、效果展示