前言
(1)本系列是基于STM32的项目笔记,内容涵盖了STM32各种外设的使用,由浅入深。
(2)小编使用的单片机是STM32F105RCT6,项目笔记基于小编的实际项目,但是博客中的内容适用于各种单片机开发的同学学习和使用。
学习目标
- W25Q64硬件设计。
- 学习SPI通讯协议。
- 完成25Q64芯片的SPI驱动程序编写。
硬件原理图
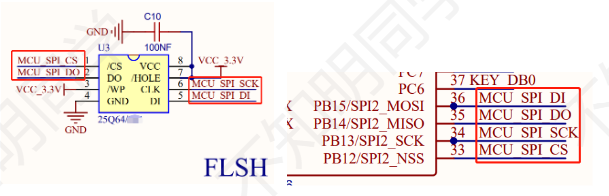
从上图可以看出 25Q64连接的是单片机的SPI2接口,通过SPI2来通讯的。
SPI通讯原理简单介绍(理解)
典型连线图
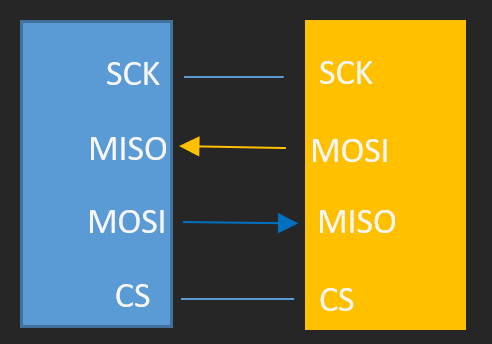
简单原理分析
SCK:决定SPI的通信速率,即 数据传输速率。
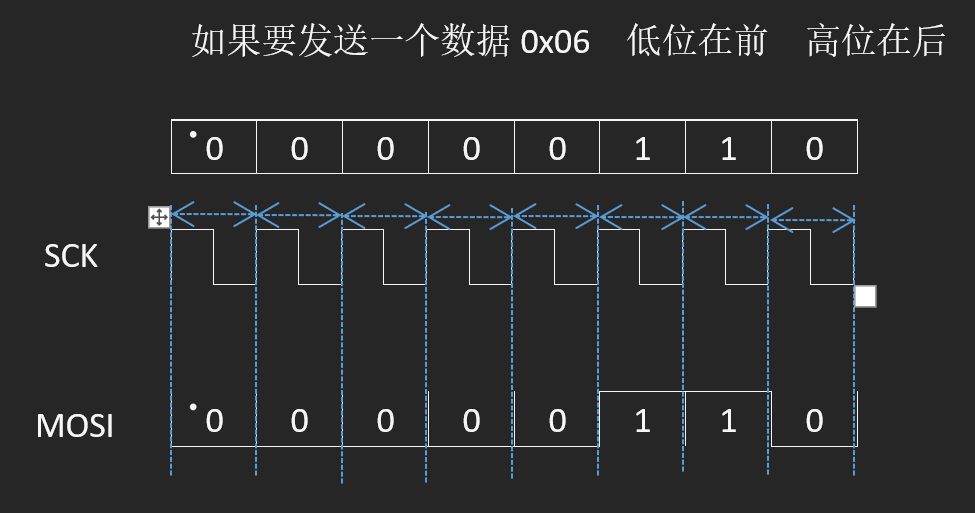
数据:1高电平 0 低电平。
SPI的四种通讯模式
https://mp.weixin.qq.com/s/ytAad2jdKczzdhD3b92apA
可以看一下上面的资料。
首先我们要了解两个特殊寄存器 分别是 CPOL (Clock POlarity)和 CPHA (Clock PHAse)。
CPOL:配置SPI总线的极性
CPHA:配置SPI总线的相位
SPI总线极性的概念: 空闲的时候时钟信号是高电平还是低电平
CPOL = 1; SCK 空闲是高电平
CPOL = 0; SCK 空闲是低电平
SPI总线的相位的概念
一个时钟周期有2个跳变沿,相位决定从那个跳变开始采集数据
CPHA = 0; 表示从第一个跳变 开始采集
CPHA = 1; 表示从第二个跳变 开始采集
SPI四种模式
模式0: CPOL = 0; CPHA = 0;
模式1:CPOL = 0; CPHA = 1;
模式2:CPOL = 1; CPHA = 0;
模式3:CPOL = 1; CPHA = 1;
数据传输方向
高位在前:MSB
低位在前: LSB
SPI的单线 和双线 模式
单线:一般用于OLED屏幕单向通讯
双向:一般用于芯片之间的双向通讯
特别说明: 一般情况下,我们不用刻意去学习四种模式的具体细节,一般芯片资料里面都会告诉你芯片支持的模式。
25Q64 SPI2的初始化操作
hal_flash.c代码
#include "stm32F10x.h"
#include "hal_flash.h"
void hal_spi2Init(void)
{
SPI_InitTypeDef SPI_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
/* Enable SPI2 and GPIOA clocks */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_SPI2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
/* Configure SPI2 pins: NSS, SCK, MISO and MOSI */
GPIO_InitStructure.GPIO_Pin = SPI2_SCK_PIN | SPI2_MISO_PIN | SPI2_MOSI_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(SPI2_SCK_PORT, &GPIO_InitStructure);
//SPI2 NSS
GPIO_InitStructure.GPIO_Pin = SPI2_NSS_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(SPI2_NSS_PORT, &GPIO_InitStructure);
GPIO_SetBits(SPI2_NSS_PORT,SPI2_NSS_PIN);
/* SPI2 configuration */
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //SPI1设置为两线全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置SPI1为主模式
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //SPI发送接收8位帧结构
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //串行时钟在不操作时,时钟为高电平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //第二个时钟沿开始采样数据
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信号由软件(使用SSI位)管理
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_8; //定义波特率预分频的值:波特率预分频值为8
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //数据传输从MSB位开始
SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值计算的多项式
SPI_Init(SPI2, &SPI_InitStructure);
/* Enable SPI2 */
SPI_Cmd(SPI2, ENABLE); //使能SPI2外设
hal_spi2CSDrive(1);//空闲时将片选信号拉高,初始化为空闲状态
}
void hal_spi2CSDrive(unsigned char sta)
{
if(sta)
GPIO_SetBits(SPI2_NSS_PORT,SPI2_NSS_PIN);
else
GPIO_ResetBits(SPI2_NSS_PORT,SPI2_NSS_PIN);
}
//SPIx 读写一个字节
//返回值:读取到的字节
unsigned char hal_spi2ReadWriteByte(unsigned char TxData)
{
unsigned char retry=0;
while(SPI_I2S_GetFlagStatus(SPI2,SPI_I2S_FLAG_TXE)==RESET)//等待发送区空
{
retry++;
if(retry>200)
return 0;
}
SPI_I2S_SendData(SPI2,TxData);
retry=0;
while(SPI_I2S_GetFlagStatus(SPI2,SPI_I2S_FLAG_RXNE)==RESET)//等待发送区空
{
retry++;
if(retry>200)
return 0;
}
return SPI_I2S_ReceiveData(SPI2);//SPI2->DR; //返回收到的数据
}
hal_flash.h代码
#ifndef _HAL_FLASH_H
#define _HAL_FLASH_H
#define SPI2_SCK_PORT GPIOB
#define SPI2_SCK_PIN GPIO_Pin_13
#define SPI2_MOSI_PORT GPIOB
#define SPI2_MOSI_PIN GPIO_Pin_15
#define SPI2_MISO_PORT GPIOB
#define SPI2_MISO_PIN GPIO_Pin_14
#define SPI2_NSS_PORT GPIOB
#define SPI2_NSS_PIN GPIO_Pin_12
void hal_spi2Init(void);
void hal_spi2CSDrive(unsigned char sta);
unsigned char hal_spi2ReadWriteByte(unsigned char TxData);
#endif
SPI2接口初始化流程(拆解代码分析)
● 定义SPI通讯的端口
● 打开相关时钟
● 初始化SPI2相关的GPIO口
● 初始化SPI2相关参数
● 片选CS初始化 拉高
定义SPI通讯的端口
#define SPI2_SCK_PORT GPIOB
#define SPI2_SCK_PIN GPIO_Pin_13
#define SPI2_MOSI_PORT GPIOB
#define SPI2_MOSI_PIN GPIO_Pin_15
#define SPI2_MISO_PORT GPIOB
#define SPI2_MISO_PIN GPIO_Pin_14
#define SPI2_NSS_PORT GPIOB//其实就是CS,片选引脚
#define SPI2_NSS_PIN GPIO_Pin_12
打开相关时钟
/* Enable SPI2 and GPIOA clocks */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_SPI2, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
初始化SPI2相关的GPIO口
/* Configure SPI2 pins: NSS, SCK, MISO and MOSI */
GPIO_InitStructure.GPIO_Pin = SPI2_SCK_PIN | SPI2_MISO_PIN | SPI2_MOSI_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(SPI2_SCK_PORT, &GPIO_InitStructure);
//SPI2 NSS
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_12);
初始化SPI2相关参数
/* SPI2 configuration */
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //SPI2设置为两线全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置SPI2为主模式
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //SP2发送接收8位帧结构
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //串行时钟在不操作时,时钟为高电平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //第二个时钟沿开始采样数据
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信号由软件(使用SSI位)管理
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_8; //定义波特率预分频的值:波特率预分频值为8
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //数据传输从MSB位开始
SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值计算的多项式
SPI_Init(SPI2, &SPI_InitStructure);
/* Enable SPI2 */
SPI_Cmd(SPI2, ENABLE); //使能SPI2外设
25Q64片选操作,拉高
void hal_spi2CSDrive(unsigned char sta)
{
if(sta)
GPIO_SetBits(GPIOB,GPIO_Pin_12);
else
GPIO_ResetBits(GPIOB,GPIO_Pin_12);
}
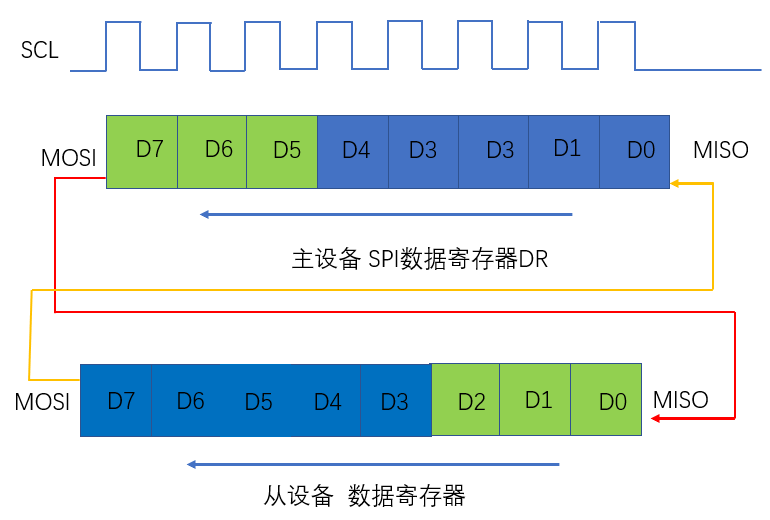
SPI数据读写函数
SPI读写数据操作原理
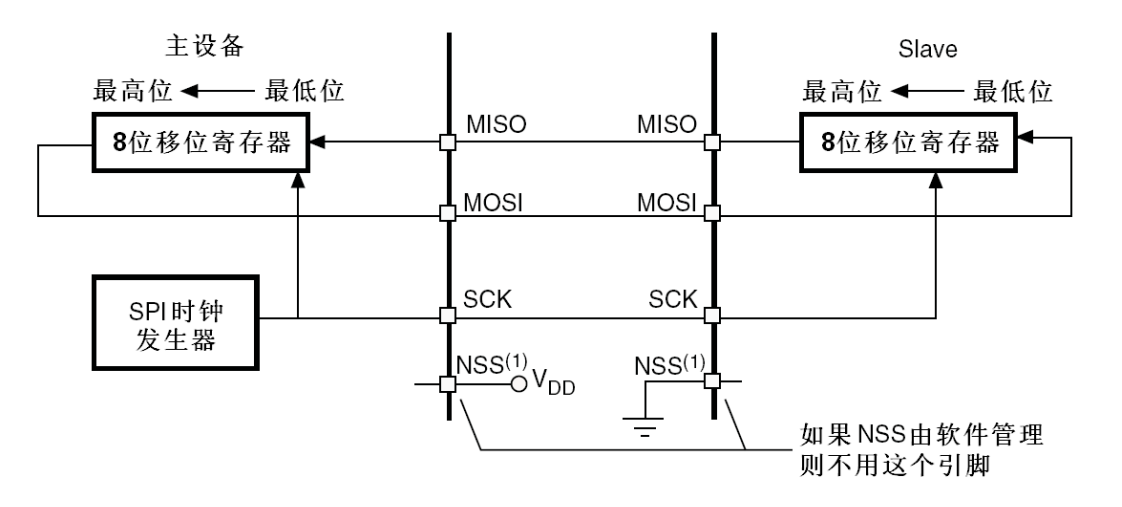
SPI 读写操作图示分析
代码分析
//SPIx 读写一个字节
//返回值:读取到的字节
unsigned char hal_spi2ReadWriteByte(unsigned char TxData)
{
unsigned char retry=0;
while(SPI_I2S_GetFlagStatus(SPI2,SPI_I2S_FLAG_TXE)==RESET)//等待发送区空
{
retry++;
if(retry>200)
return 0;
}
SPI_I2S_SendData(SPI2,TxData);
retry=0;
while(SPI_I2S_GetFlagStatus(SPI2,SPI_I2S_FLAG_RXNE)==RESET)//
{
retry++;
if(retry>200)
return 0;
}
return SPI_I2S_ReceiveData(SPI2);//SPI2->DR; //返回收到的数据
}