- 如果去官网或者其他安装包安装ros和vscode外壳的时候遇到了一些问题,但是也没有其他解决方案或者解决方案非常麻烦,去选择鱼香肉丝一键安装
- 接下来可能会需要安装ros的一些基础包,我遇到的问题有软件包无法定位,工作空间下的文件不能完全编译以及安装软件时显示某个依赖不会被安装,因为要保持现状。
- 软件包无法定位
- 可以尝试这个更新一下软件,做法:设置---软件和更新--更新--从下列地点安装更新(全选)
- 可以尝试一下换源,再使用
sudo apt-get update - 工作空间下不能完全编译以及安装软件时显示某个依赖不会被安装
- 软件包无法定位

你可能会报一个类似于这种的错误,这是因为缺少一些包,上面显示我们缺少navigation,但是安装navigation,依赖于map-server;安装map-server,依赖于libsdl1.2-dev、libsdl-image1.2-dev。(这个两个自己用命令行安装就会显示某个依赖不会被安装,因为要保持现状)
接下来可以参考这篇博客:Ubuntu18.04,ros版本melodic:安装 navigation 包、map-server时,报Could NOT find SDL以及libsdl1.2-dev安装问题_W-ilde的博客-CSDN博客
上面这篇博客安装有安装的命令行错误了

此处解决后编译过程中可能还会出现个错误
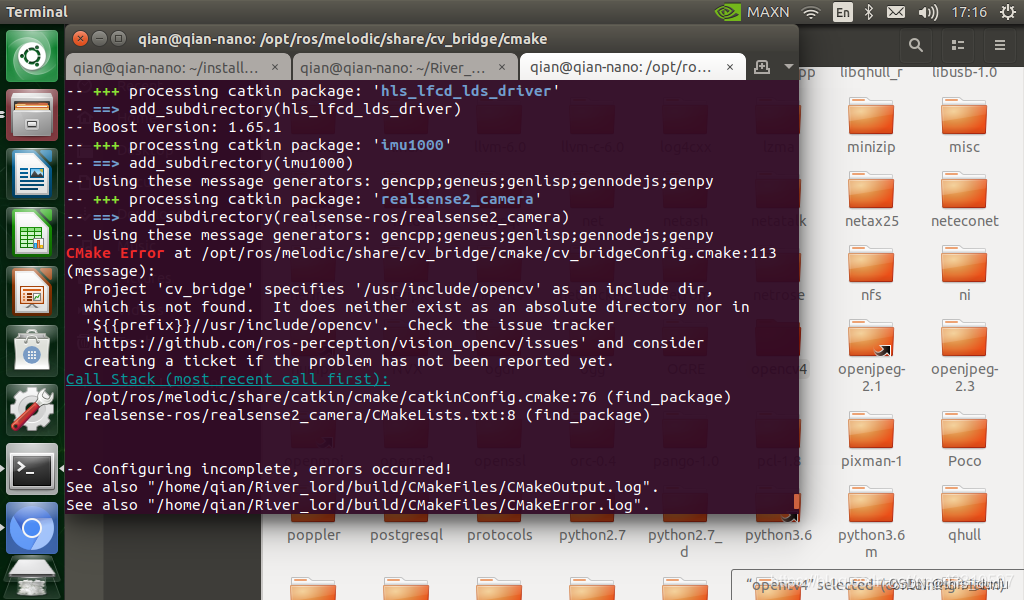
这是因为opencv的版本不同,然后在编译的文件中名字不同导致的,可以使用
sudo ln -s /usr/include/opencv4 /usr/include/opencv