三相锁相环原理分析:
这里没有把Vq与零做差,PI控制器的参数应该负的。
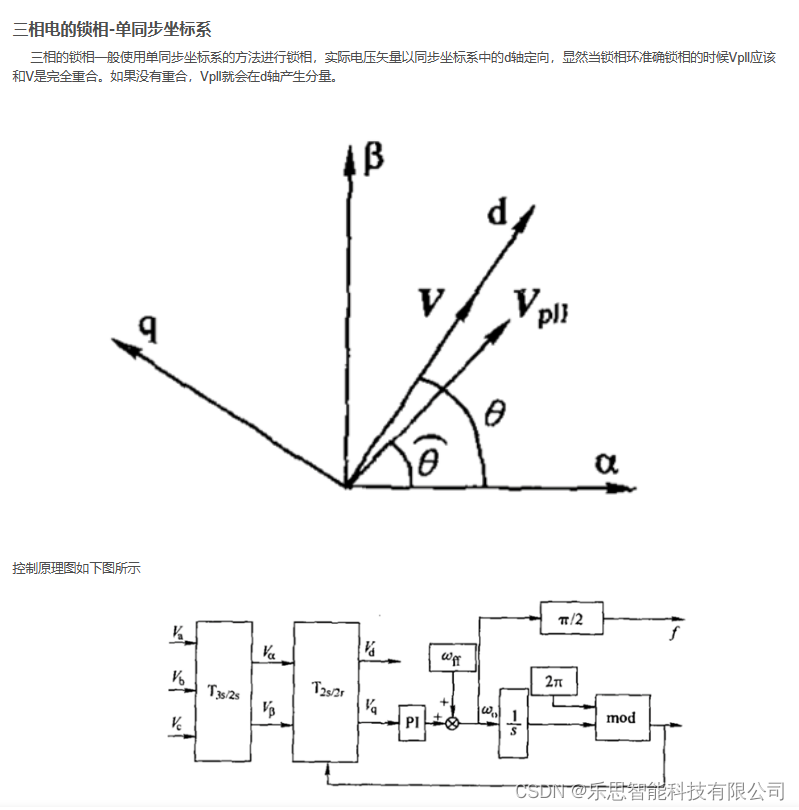
首先对电网电压进行Clark 变换( abc→αβ)和Park 变换( αβ–dq)变换,即将三相静止abc 坐标系的电压变量变换成两相同步旋转dq坐标系的电压变量,这种变换的优势在于能将三相静止abc坐标系的中正弦量变换成两相同步旋转d坐标系中的直流量。在同步旋转坐标系中,根据锁相环工作的基本性能要求,即必须使矢量Vpll、V完全重合才能实现相位锁定,显然只要通过闭环控制,使Vq=0即可实现锁相。实际上,在上图所示的结构中,将Vq输人PI调节器,当频率锁定时,Vq必为一直流量,由于PI调节器具有直流无静差调节特性,因此通过对Vq的PI调节,即可使Vq趋于零,从而实现锁相。而将PI调节器的输出与实际电网额定频率相叠加以获得锁相环的输出频率。
首先,在电力系统中,同步控制通常用于控制电力发电机的输出电压和频率,使其与电网保持同步。可以使用PI控制器来实现同步控制。在这个过程中,PI控制器的Kp和Ki参数通常是负的,以达到稳态误差为零的目标。
其次,在同步旋转坐标系中通过闭环控制使Vq=0以实现锁相。这是因为,当中正弦量(Vd)为零时,Vq与电网频率成比例,即Vq=(2/π)f×Vs,其中f是电网频率,Vs是电网电压的峰值。因此,当Vq为零时,电机输出电压的频率和电网频率相等,从而实现同步。
总之,通过PI控制器控制中正弦量(Vd)和垂直正弦量(Vq)可以实现电机输出电压与电网同步。而在同步旋转坐标系中,通过闭环控制使Vq=0可以实现锁相。
以下是三相锁相环的基本闭环控制代码框架。该控制代码是使用C语言编写的,可以在嵌入式系统中应用。
// 电网频率(Hz)
#define GRID_FREQUENCY 50
// 锁相环参数
#define KP 0.1
#define KI 0.01
// 锁相环状态变量
float theta = 0.0; // 相位偏移
float omega = 0.0; // 频率偏移
float error = 0.0; // 相位误差
float integrator = 0.0; // 积分器
// 锁相环控制器
void pllController(float vd, float vq, float dt)
{
float vpll, vref, phase;
float sine, cosine;
// 计算中正弦量和垂直正弦量的幅值
float vq_amp = sqrt(vd*vd + vq*vq);
float vd_amp = 0.0;
// 计算相位偏移
phase = theta + GRID_FREQUENCY*2*PI*dt;
// 计算频率偏移
omega = theta - KP*error - KI*integrator;
// 计算中正弦量
sine = sin(phase);
cosine = cos(phase);
vpll = vd*cosine + vq*sine;
// 输出频率偏移量
printf("Frequency offset: %f Hz\n", omega);
// 相位误差计算
error = atan2(vq, vd);
// 中正弦量PI控制
vref = vpll - omega*vq_amp;
// PI积分器
integrator = integrator + KI*error*dt;
// 更新相位偏移
theta = theta + omega*dt;
}
// 主循环
int main(void)
{
float vd, vq, dt;
while(1)
{
// 读取中正弦量和垂直正弦量的值
vd = readAnalogInput(0);
vq = readAnalogInput(1);
// 读取采样时间
dt = readClock();
// 执行锁相环控制
pllController(vd, vq, dt);
}
return 0;
}
上述代码中,pllController()函数实现了锁相环的基本闭环控制算法。在该函数中,首先计算中正弦量(Vd)和垂直正弦量(Vq)的幅值,并使用这些值计算相位偏移量和频率偏移量。然后,使用PI控制器对中正弦量进行控制,同时更新积分器的值和相位偏移量。
在主函数中,我们将读取中正弦量和垂直正弦量的值,然后调用pllController()函数以执行锁相环控制算法。在实际应用中,可能需要根据具体的应用场景调整锁相环参数和控制算法的参数。
需要注意的是,这只是一个基本的代码框架,实际上在实际应用中,还需要进行很多的参数调整、保护逻辑编写以及硬件接口设计等工作。