周期 角频率 频率 振幅 初相角
当我们谈论傅里叶级数或波形分析时,以下术语经常出现:
-
周期 T T T: 函数在其图形上重复的时间或空间的长度。周期的倒数是频率。
-
频率 f f f: 周期的倒数,即一秒内波形重复的次数。单位通常为赫兹(Hz)。
f = 1 T f = \frac{1}{T} f=T1 -
角频率 ω \omega ω: 角频率是频率的 2 π 2\pi 2π倍,通常用于正弦和余弦函数中。
ω = 2 π f = 2 π T \omega = 2\pi f = \frac{2\pi}{T} ω=2πf=T2π -
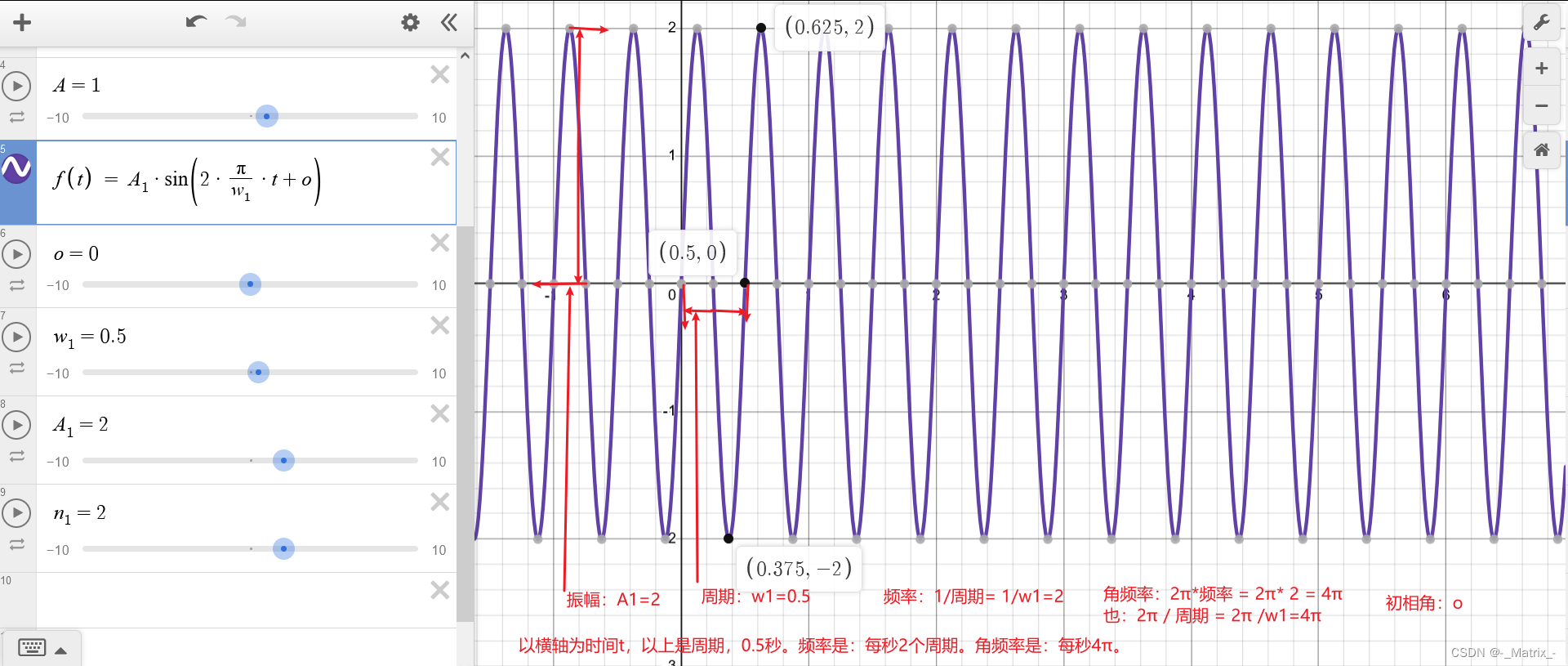
振幅: 振幅是波形的最大幅度或强度。在傅里叶级数中,振幅由正弦和余弦项的系数确定,可以反映波形的大小。
-
初相角 ϕ \phi ϕ: 初始相位或相位偏移表示波形在时间 t = 0 t = 0 t=0时的位置。在正弦和余弦波中,相位偏移可以将波形沿时间轴移动。
将这些概念结合起来,可以得到一个周期函数的一般形式:
f ( t ) = A cos ( ω t + ϕ ) f(t) = A \cos(\omega t + \phi) f(t)=Acos(ωt+ϕ)
其中:
- A A A 是振幅
- ω \omega ω 是角频率
- t t t 是时间
- ϕ \phi ϕ 是初相角
这些参数共同决定了波形的外观和特性。在傅里叶分析中,它们帮助我们将复杂的波形分解为简单的正弦和余弦波的组合。
当然!让我们通过一个具体的例子来解释这些概念。
假设我们有一个信号,其表达式为:
f ( t ) = 3 cos ( 2 π ⋅ 2 t + π 3 ) f(t) = 3 \cos(2\pi \cdot 2t + \frac{\pi}{3}) f(t)=3cos(2π⋅2t+3π)
我们可以从这个公式中识别以下参数:
-
振幅 A = 3 A = 3 A=3: 这告诉我们该信号的最大幅度为3。
-
角频率 ω = 2 π ⋅ 2 \omega = 2\pi \cdot 2 ω=2π⋅2: 这告诉我们该信号每秒会完成 2 ⋅ 2 π 2 \cdot 2\pi 2⋅2π 弧度的振动。
-
频率 f = 2 f = 2 f=2: 由角频率除以 2 π 2\pi 2π 得到,这告诉我们该信号每秒振动2次,即周期为0.5秒。
-
周期 f = 1 T f = \frac{1}{T} f=T1: 给定频率 f = 2 f = 2 f=2,我们可以解得: T = 1 2 秒 T = \frac{1}{2} \text{ 秒} T=21 秒,所以这个信号的周期是0.5秒,意味着每0.5秒信号的波形会重复一次。
-
初相角 ϕ = π 3 \phi = \frac{\pi}{3} ϕ=3π: 这反映了波形在 t = 0 t = 0 t=0时的位置,或者说该波形相对于标准余弦波的偏移。
这个特定的信号可以描述许多不同的物理系统,从简单的弹簧振荡器到交流电流。振幅、频率和相位的这些参数提供了描述波形特性的完整信息。
在傅里叶分析中,这样的波形可以被看作是一个更复杂信号的构成部分。通过将复杂信号分解为这样的简单正弦和余弦波,我们可以更容易地理解和分析它。
相位差
相位差是描述两个或多个周期信号之间相对时间偏移的量度。对于两个相同频率的正弦波信号,相位差可以表达为它们的峰值在时间上的偏移量。
用数学表示,假设有两个正弦波信号:
A 1 sin ( 2 π f t + ϕ 1 ) A_1 \sin(2\pi f t + \phi_1) A1sin(2πft+ϕ1)
A 2 sin ( 2 π f t + ϕ 2 ) A_2 \sin(2\pi f t + \phi_2) A2sin(2πft+ϕ2)
其中, A 1 A_1 A1 和 A 2 A_2 A2 是振幅, f f f是频率, t t t 是时间,而 ϕ 1 \phi_1 ϕ1 和 ϕ 2 \phi_2 ϕ2是初始相位。
这两个信号的相位差就是 ϕ 2 − ϕ 1 \phi_2 - \phi_1 ϕ2−ϕ1,可以用弧度或度来表示。
相位差对于许多工程和物理应用都很重要,例如在通信、声学和电力系统中。不同的相位差可能会导致系统行为的显著不同。例如,在交流电路中,电流和电压之间的相位差与电路中的功率因素有关;在通信系统中,相位差可以用于编码信息等。