一、PWM
PWM有着非常广泛的应用,比如直流电机的无极调速,开关电源、逆变器等等,个人认为,要充分理解或掌握模拟电路、且有所突破,很有必要吃透这三个知识点:
-
PWM
-
电感
-
纹波
PWM是一种技术手段,PWM波是在这种技术手段控制下的脉冲波,如果你不理解是把握不住PWM波的!
如下图所示,这种比喻很形象也很恰当,希望对学习的朋友有所帮助与启发。 PWM全称Pulse Width Modulation:脉冲宽度调制(简称脉宽调制,通俗的讲就是调节脉冲的宽度),是电子电力应用中非常重要的一种控制技术,在理解TA之前我们先来了解几个概念 。
PWM全称Pulse Width Modulation:脉冲宽度调制(简称脉宽调制,通俗的讲就是调节脉冲的宽度),是电子电力应用中非常重要的一种控制技术,在理解TA之前我们先来了解几个概念 。 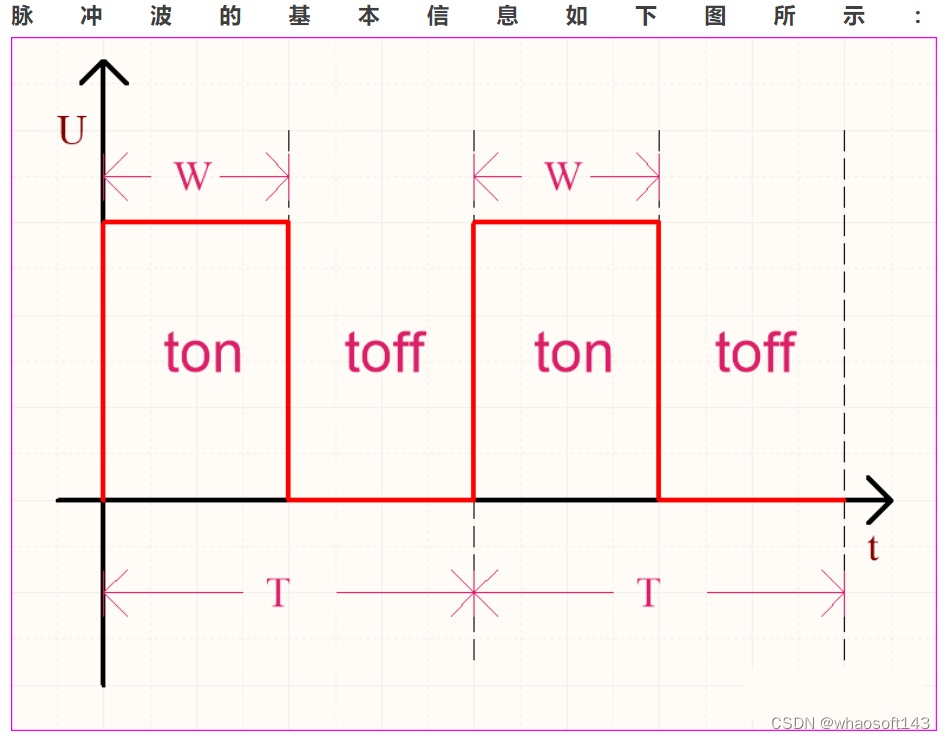
-
脉冲周期T:单位是时间,比如纳秒ns、微妙μs、毫秒ms等;
-
脉冲频率f:单位是赫兹Hz、千赫兹kHz等,与脉冲周期成倒数关系,即f=1/T;
-
脉冲宽度W:简称脉宽,是脉冲高电平持续的时间,单位是时间,比如纳秒ns、微妙μs、毫秒ms等;
-
占空比D:脉宽除以脉冲周期得到的值,百分数表示,比如50%,也常有小数或分数表示的,比如0.5或1/2。
以上之间的关系如下图所列的公式: 工程应用中的PWM波是幅值、周期(或频率)不变,脉宽(或占空比)可调的脉冲波,接下来我们来认清该PWM波到底是什么,TA隐藏着什么思想?
工程应用中的PWM波是幅值、周期(或频率)不变,脉宽(或占空比)可调的脉冲波,接下来我们来认清该PWM波到底是什么,TA隐藏着什么思想?
当我们想要控制一个直流电机的转速,我们可以通过改变其两端电压即可,但是该种方法有很大的局限性,可调直流电源构造复杂、成本高昂,应用起来很不现实。
所以我们采用另外的控制方式:电压源→驱动器→直流电机,电压源提供直流电压,不同的驱动器控制不同的直流电机,应用非常灵活,其中驱动器对电机的调速控制就是利用PWM。
可调直流电源控制与PWM控制都是能调速的,那么它们有什么相同之处呢?
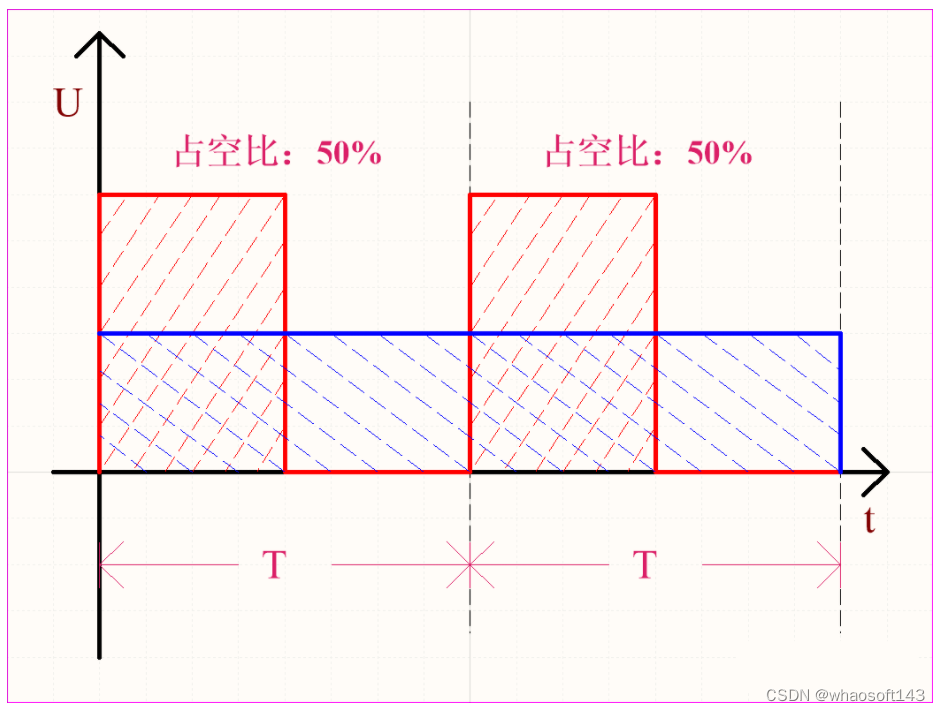
如下图,电机为某相同转速时,红色代表驱动器输出幅值不变的PWM波,蓝色代表可调直流电源输出的电压,两者都是直接作用到负载。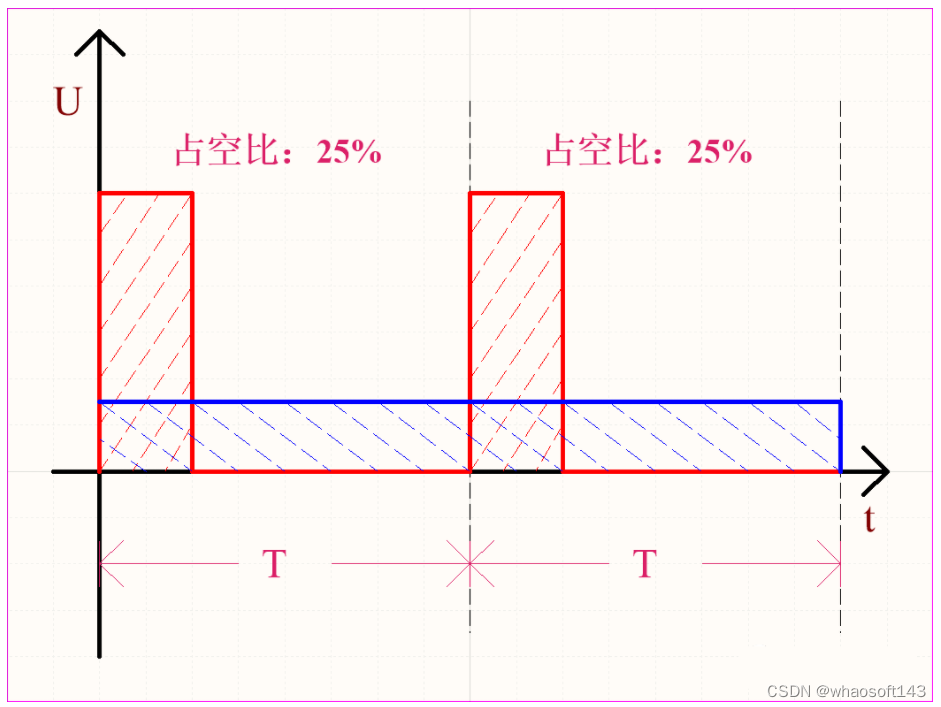


由以上得知:
当PWM波的占空比越大时,所对应的直流电压与PWM波的幅值越接近;反之与0V越接近。
周期的红色PWM波脉宽下的矩形面积之和与蓝色直流电压的面积相等,即伏秒积相等:
U红(幅值) × ton = U蓝 × T
两端同时除以T,得到如下关系式:
U红(幅值) × 占空比 = U蓝
例如当PWM波的幅值为24V,占空比为50%时,与直流电压12V作用到电机上所产生的效果是一模一样的,即速度相同,即24V×50%=12V。
另外,既然满足这个关系,那PWM波的频率是不是可以随意了,答案当然不是,频率太低会导致电机运转不畅,振动大,噪音大;频率太高会导致驱动器开关损耗较大,甚至有电机会啸叫而不转的情况。
一般1k~30k的PWM频率较为普遍,几百Hz的也有,实际上还是根据电机功率在测试时确定合适的PWM频率范围为宜。
如下图为实物测试,脉宽在变化,周期不变的PWM波。
所加负载如下图,为PWM控制电机调速实物测试,有刷直流电机的PWM无极调速,其中LED是并联在电机输入端的,其亮弱反映电机速度的变化。whaosoft aiot http://143ai.com

要点:
-
PWM波其实就是一种脉宽可连续调节的矩形脉冲波;
-
占空比其实就是描述脉宽与脉冲周期的比值,是量化值,便于分析研究,当我们用占空比来表达时,对脉宽就不那么关心了;
-
占空比调节就是脉宽调节,表达不一样,但本质是一样的;
-
PWM波满足伏秒积计算:U红(幅值) × 占空比 = U蓝,作用效果与直流电压一样。
二、 过冲与相位裕量
负反馈因其可以稳定增益、减小失真、扩展带宽、变换阻抗等功能而在电子、控制等诸多领域发挥着重大作用。小至一颗电源芯片,大至一辆汽车,都在负反馈技术的帮助下使我们的生活变得更丰富。然而,负反馈的使用也是有代价的,即可能会导致系统不稳定。
为了了解系统的稳定性情况,最直接、精确的方式就是测量系统的相位裕量(Phase Margin/ PM),我们通常会使用环路分析仪进行测试。
向大家介绍另一种方法,即通过测量过冲情况(OS)得到系统的相位裕量。
电路的二阶系统化
一些常见的反馈电路,通常都是二阶系统,我们以运放容性带载为例来讨论: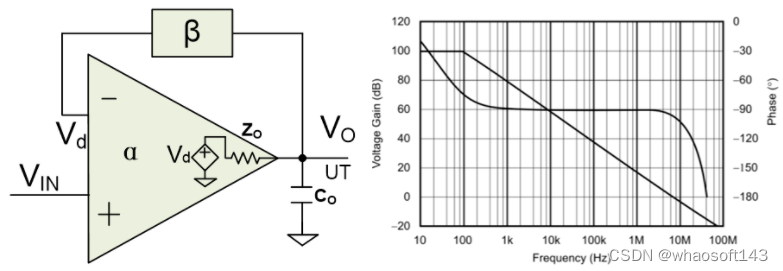 *运放的容性负载 *典型通用运放的开环增益曲线
*运放的容性负载 *典型通用运放的开环增益曲线
一个典型通用运放的开环增益曲线如上图所示。它一般拥有一个低频的主极点,如100Hz,高频极点通常会被设计为远高于穿越频率,所以常规的运放电路是稳定的。
当运放存在容性负载的时候,开环输出电抗(Zo)与输出电容(Co)形成的极点会处在反馈环路内,当极点频率靠近或小于穿越频率,则会使得系统的相位裕度明显降低,导致不稳定的情况发生。
所以,一个运放带容性负载的放大电路,其传递函数可以表示为: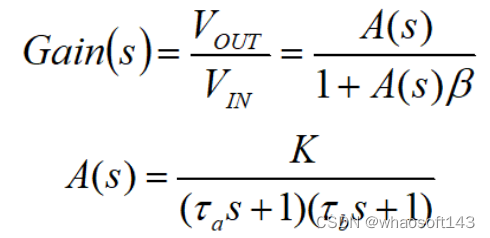
其中,K为运放的DC开环增益,β是反馈系数(作为跟随器时,β=1,100倍放大时,β=0.01)。
1/τa是运放的低频主极点的角频率,1/τb是Zo和Co产生寄生极点的角频率。可见,τa>> τb。
上式可被转换为标准的二阶系统 由于K为运放的DC开环增益,所以Kβ>>1
由于K为运放的DC开环增益,所以Kβ>>1 
其中,ωn为电路的自然频率,ξ为阻尼系数,且 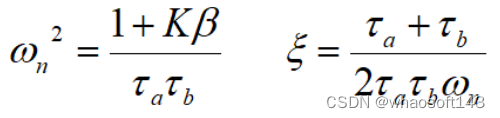
时域过冲与阻尼系数的关系
我们知道,系统处于欠阻尼状态,即0<ξ<1,才会存在过冲的情况。
对一个标准的二阶系统来说,
可以求得其单位阶跃响应函数为: 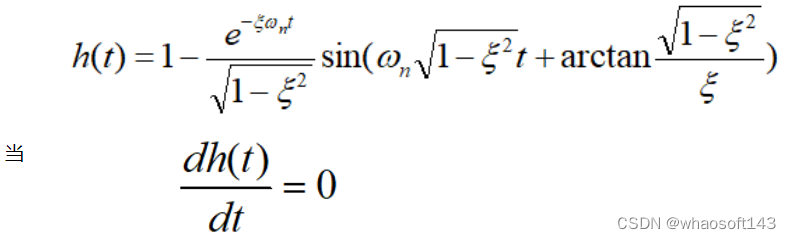 求得阶跃响应第一个峰值对应的时间为:
求得阶跃响应第一个峰值对应的时间为:  因此我们可以绘制如下过冲与阻尼系数的曲线
因此我们可以绘制如下过冲与阻尼系数的曲线 *过冲与阻尼系数的关系
*过冲与阻尼系数的关系
过冲可以经由在输入端给予一个小的阶跃信号,并测量输出端得到。如下图是在ξ=0.35的系统中在1ms时使用100mV阶跃输入所测得的过冲情况,过冲为31%。 相位裕量与阻尼系数的关系
相位裕量与阻尼系数的关系
我们接下去分析阻尼系数与相位裕量(Phase Margin)的关系
系统的环路增益为: 具此我们可以绘制如下相位裕量与阻尼系数的曲线
具此我们可以绘制如下相位裕量与阻尼系数的曲线 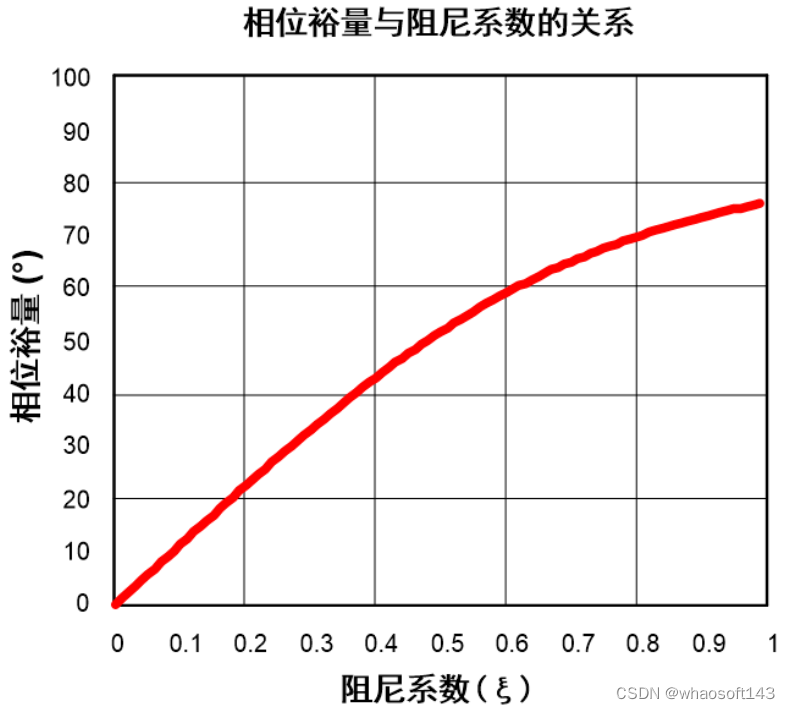 *相位裕量与阻尼系数的关系
*相位裕量与阻尼系数的关系
相位裕量与过冲的关系
由此,我们借由阻尼系数,得到相位裕量与过冲的关系,绘制曲线如下 *相位裕量与过冲的关系
*相位裕量与过冲的关系
由上图可知,当相位裕量大于70˚以上时已经几乎没有过冲
相位裕量60˚ 时, OS(60˚)≈8.8%
相位裕量45˚ 时, OS(45˚) ≈23.4%
讨论是基于二阶系统的,所以如果实际的电路并非二阶系统,那么相位裕量与过冲的关系将并不严格遵循上述推论。但幸运的是,现实中的大部分电路都近似于二阶系统,所以通过观察过冲情况(OS)来判断系统稳定性的方法,对于有时候的系统调试(特别是,对于差分放大器或者SOC等并没有提供反馈引脚而无法采用环路分析仪的场合),或者定性分析,都是大有裨益的。