周末了 今天又来分享了
一、各种通信口
UART、I2C、SPI、TTL、RS232、RS422、RS485、CAN、USB、SD卡、1-WIRE、Ethernet
在单片机开发中,UART、I2C、RS485等普遍在用,对它们的认识可能模棱两可,本文把它们整理了一下。本文较长,阅读时间大约10分钟。
UART通用异步收发器
UART口指的是一种物理接口形式(硬件)。
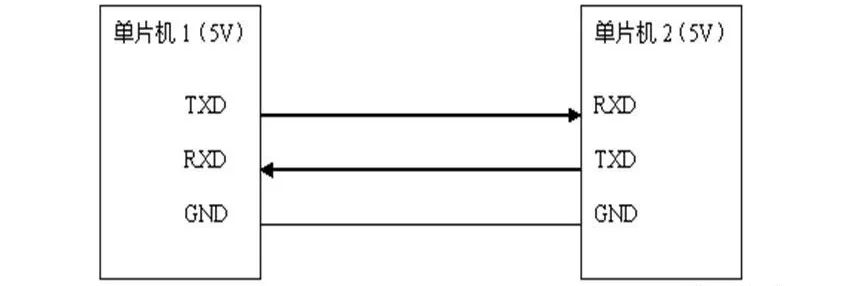
UART是异步,全双工串口总线。它比同步串口复杂很多。有两根线,一根TXD用于发送,一根RXD用于接收。
UART的串行数据传输不需要使用时钟信号来同步传输,而是依赖于发送设备和接收设备之间预定义的配置,STM32相关实例:按下按键,通过串口发送数据实例。
对于发送设备和接收设备来说,两者的串行通信配置应该设置为完全相同。


起始位:表示数据传输的开始,电平逻辑为“0” 。
数据位:可能值有5、6、7、8、9,表示传输这几个bit 位数据。一般取值为8,因为一个ASCII 字符值为8 位。
奇偶校验位:用于接收方对接收到的数据进行校验,校验“1” 的位数为偶数(偶校验) 或奇数(奇校验),以此来校验数据传送的正确性,使用时不需要此位也可以。
停止位:表示一帧数据的结束。电平逻辑为“1”。
如果用通用IO口模拟UART总线,则需一个输入口,一个输出口。
I2C总线
I2C总线是一种同步、半双工双向的两线式串口总线。它由两条总线组成:串行时钟线SCL和串行数据线SDA。
SCL线——负责产生同步时钟脉冲。
SDA线——负责在设备间传输串行数据。
该总线可以将多个I2C设备连接到该系统上。连接到I2C总线上的设备既可以用作主设备,也可以用作从设备。
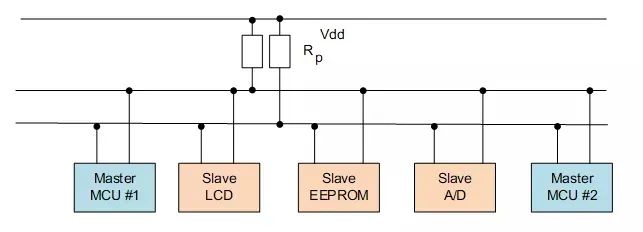
主设备负责控制通信,通过对数据传输进行初始化,来发送数据并产生所需的同步时钟脉冲。从设备则是等待来自主设备的命令,并响应命令接收。
主设备和从设备都可以作为发送设备或接收设备。无论主设备是作为发送设备还是接收设备,同步时钟信号都只能由主设备产生。
如果用通用IO口模拟I2C总线,并实现双向传输,则需一个输入输出口(SDA),另外还需一个输出口(SCL)。
SPI串行外设接口
SPI总线是同步、全双工双向的4线式串行接口总线。它是由“单个主设备+多个从设备”构成的系统。
在系统中,只要任意时刻只有一个主设备是处于激活状态的,就可以存在多个SPI主设备。常运用于AD转换器、EEPROM、FLASH、实时时钟、数字信号处理器和数字信号解码器之间实现通信。
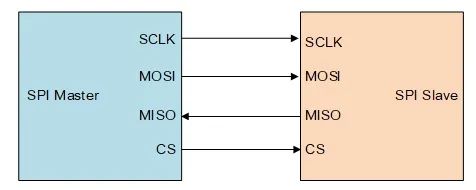
为了实现通信,SPI共有4条信号线,分别是:
-
主设备出、从设备入(Master Out Slave In,MOSI):由主设备向从设备传输数据的信号线,也称为从设备输入(Slave Input/Slave Data In,SI/SDI)。
-
主设备入、从设备出(Master In Slave Out,MISO):由从设备向主设备传输数据的信号线,也称为从设备输出(Slave Output/Slave Data Out,SO/SDO)。
-
串行时钟(Serial Clock,SCLK):传输时钟信号的信号线。
-
从设备选择(Slave Select,SS):用于选择从设备的信号线,低电平有效。
SPI 的工作时序模式由CPOL(Clock Polarity,时钟极性)和CPHA(Clock Phase,时钟相位)之间的相位关系决定,CPOL 表示时钟信号的初始电平的状态,CPOL 为0 表示时钟信号初始状态为低电平,为1 表示时钟信号的初始电平是高电平。CPHA 表示在哪个时钟沿采样数据,CPHA 为0 表示在首个时钟变化沿采样数据,而CPHA 为1 则表示在第二个时钟变化沿采样数据。
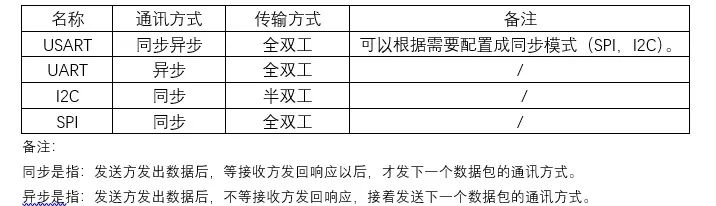
UART、SPI、I2C比较
-
I2C线更少,比UART、SPI更为强大,但是技术上也更加麻烦些,因为I2C需要有双向IO的支持,而且使用上拉电阻,抗干扰能力较弱,一般用于同一板卡上芯片之间的通信,较少用于远距离通信。
-
SPI实现要简单一些,UART需要固定的波特率,就是说两位数据的间隔要相等,而SPI则无所谓,因为它是有时钟的协议。
-
I2C的速度比SPI慢一点,协议比SPI复杂一点,但是连线也比标准的SPI要少。
-
UART一帧可以传5/6/7/8位,I2C必须是8位。I2C和SPI都从最高位开始传。
-
SPI用片选信号选择从机,I2C用地址选择从机。
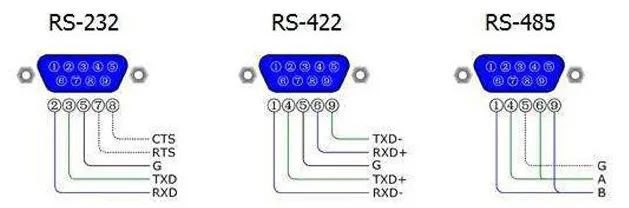
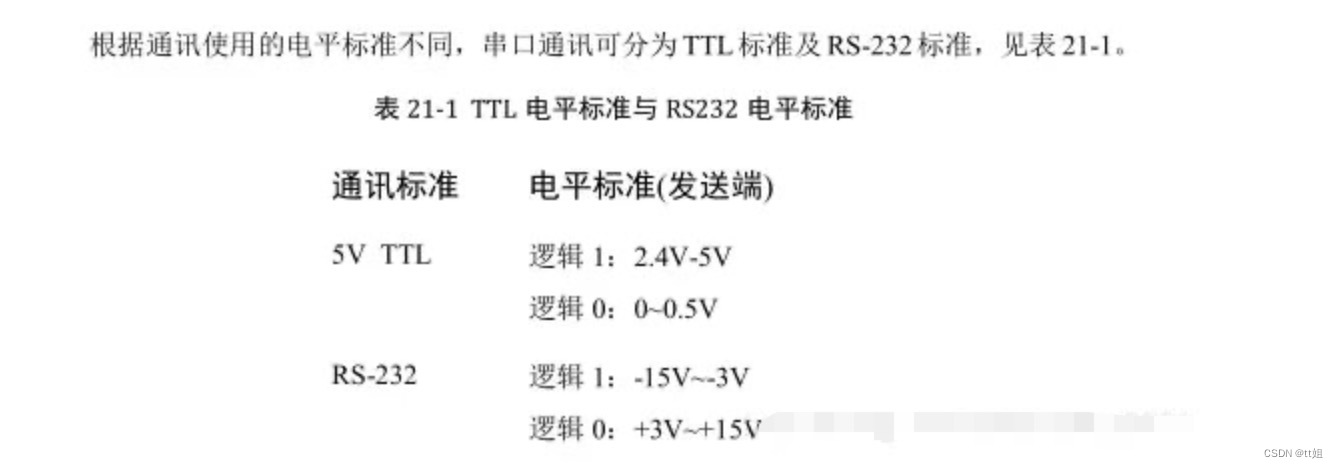
RS232串口通信
传输线有两根,地线一根。电平是负逻辑:
-3V~-15V逻辑“1”,+3V~+15V逻辑“0”。
RS-232串口通信传输距离15米左右。可做到双向传输,全双工通讯,传输速率低20kbps 。
下图是DB9公头和母头的定义,一般用的最多的是RXD、TXD、GND三个信号。

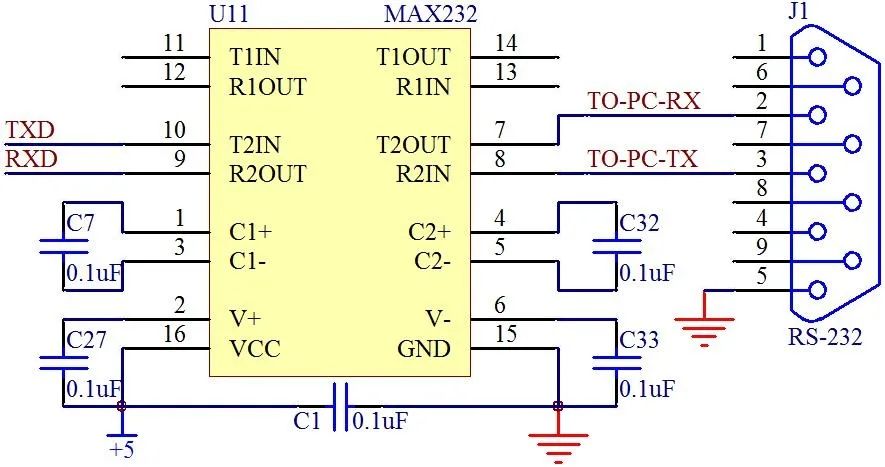
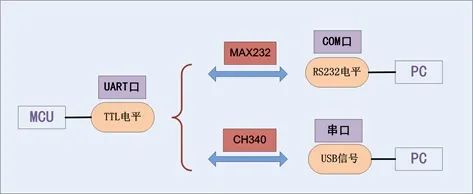
TTL和RS-232互转
单片机接口一般是TTL电平,如果接232电平的外设,就需要加TTL转RS232的模块。如下图,可用芯片MAX232进行转换。
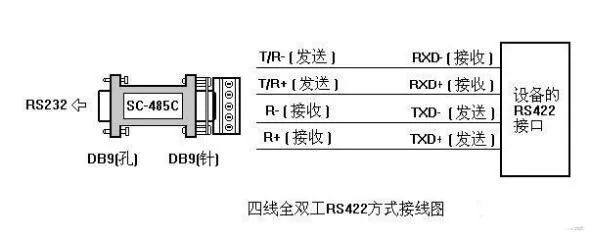
RS422串口通信
RS-422有4根信号线:两根发送、两根接收和一根地线,是全双工通信。
它有一个主设备,其余为从设备,从设备之间不能通信,所以RS-422支持点对多的双向通信。
RS485串口通信
RS-485采用平衡发送和差分接收,因此具有抑制共模干扰的能力。
采用两线半双工传输,最大速率10Mb/s,电平逻辑是两线的电平差来决定的,提高抗干扰能力,传输距离长(几十米到上千米)。
+2V~+6V逻辑“1”,-2~-6V逻辑“0”。
TTL转成RS-485很常见,比如MAX485,参考电路如下
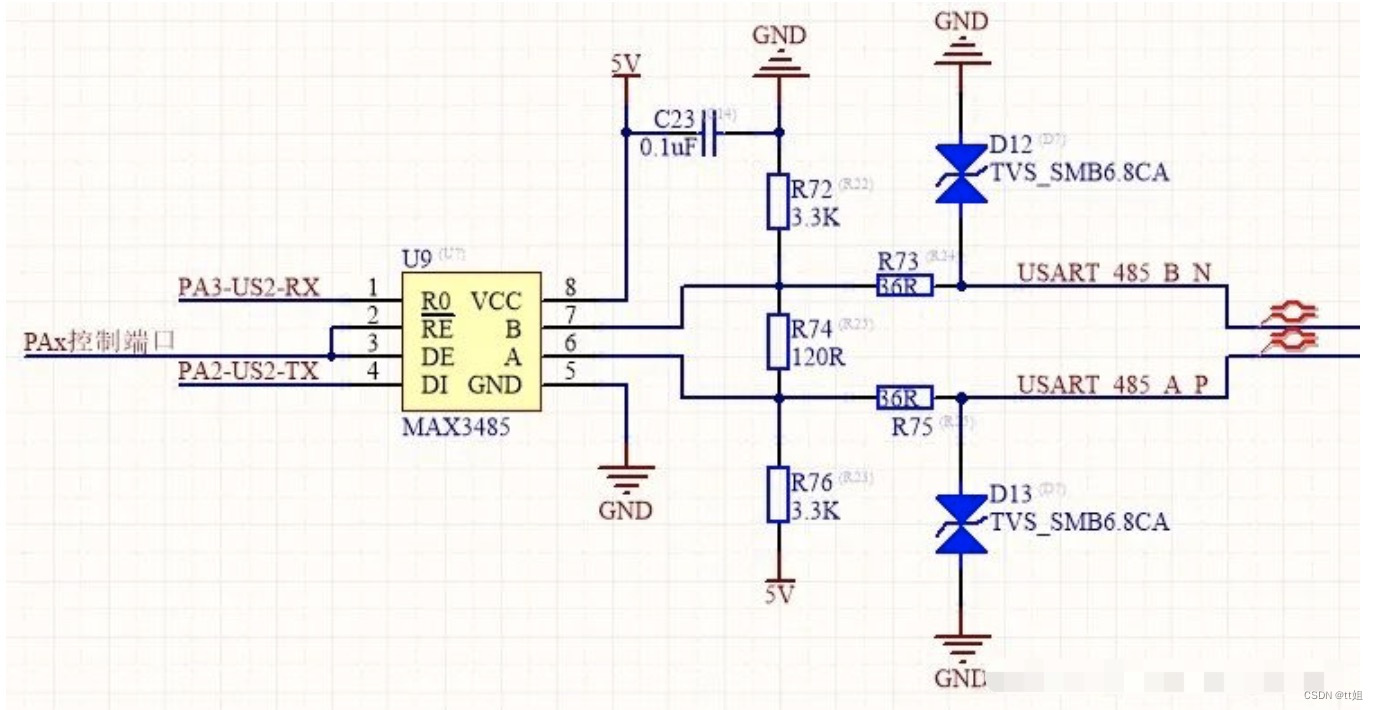
RE引脚:接收器输出使能(低电平有效)。
DE引脚:发送器输出使能(高电平有效)。可以直接通过MCU的IO端口控制。
TTL
嵌入式里面说的串口,一般是指UART口。4个pin(Vcc,GND,RX,TX),用TTL电平。
PC中的COM口即串行通讯端口,简称串口。9个Pin,用RS232电平。

串口、COM口是指的物理接口形式(硬件)。而TTL、RS-232、RS-485是指电平标准(电信号)。
单片机与PC通讯示意图如下:
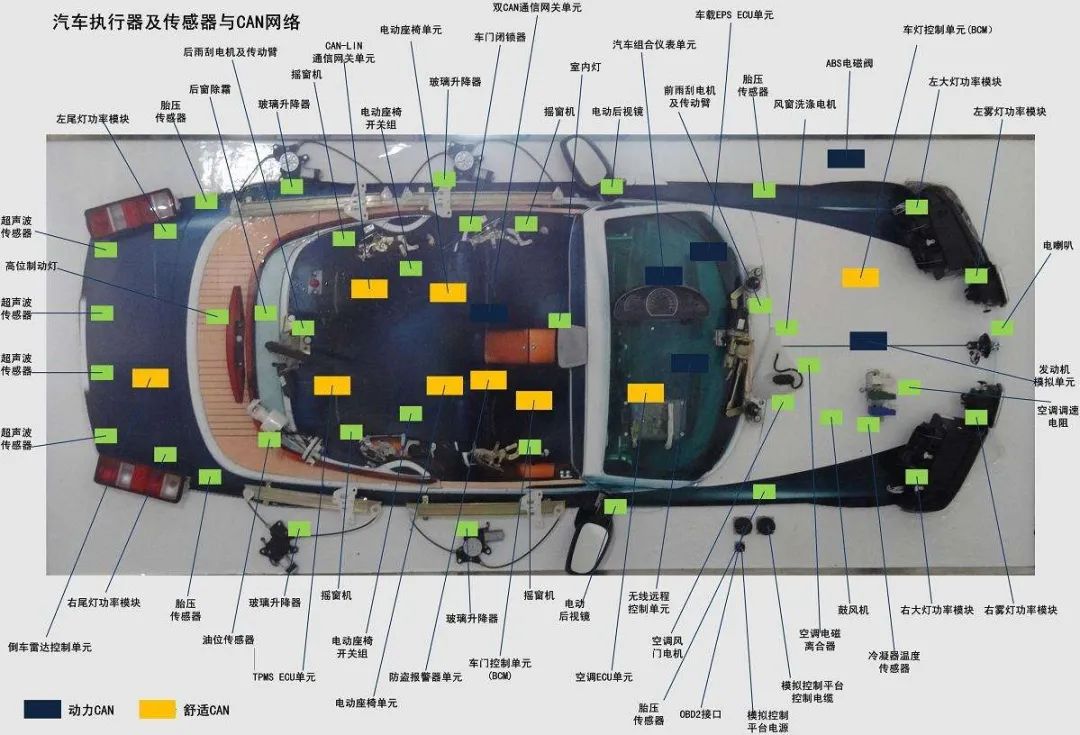
CAN总线
CAN是控制器局域网络的简称,是一种能够实现分布式实时控制的串行通信网络。CAN总线的功能复杂且智能。主要用于汽车通信。
CAN总线网络主要挂在CAN_H和CAN_L,各个节点通过这两条线实现信号的串行差分传输,为了避免信号的反射和干扰,还需要在CAN_H和CAN_L之间接上120欧姆的终端电阻。

每一个设备既可做主设备也可做从设备。CAN总线的通信距离可达10千米(速率低于5Kbps),速度可达1Mbps(通信距离小于40M)。
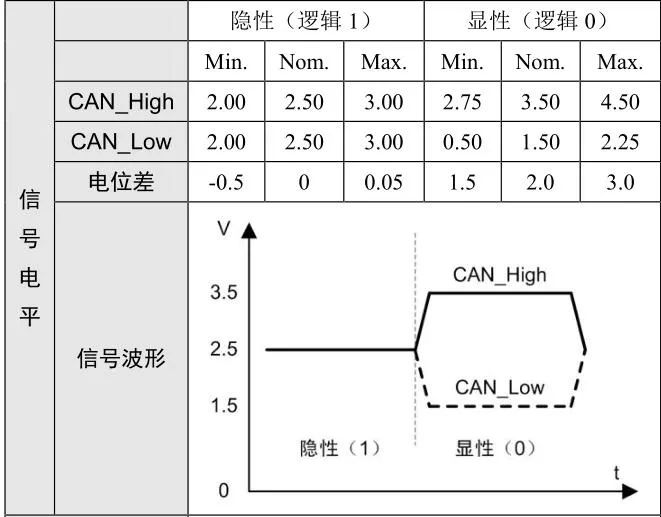
CAN电平逻辑
CAN总线采用"线与"的规则进行总线冲裁,1&0为0,所以称0为显性,1为隐性。
从电位上看,因为规定高电位为0,低电位为1,同时发出信号时实际呈现为高电位,从现象上看就像0覆盖了1,所以称0为显性,1为隐性。
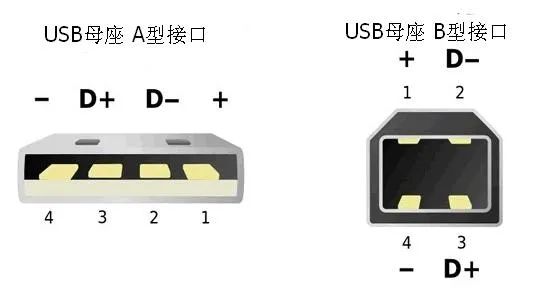
USB通信串行总线
USB接口最少有四根线,其中有两根是数据线,而所有的USB数据传输都是通过这两根线完成。它的通信远比串口复杂的多。
两根数据线采用差分传输,即需要两根数据线配合才能传输一个bit,因此是半双工通信,同一时间只能发送或者接收。
USB 规定,如果电压电平不变,代表逻辑1;如果电压电平变化,则代表逻辑0。
USB转TTL
一般USB转串口都是用CH340G芯片。
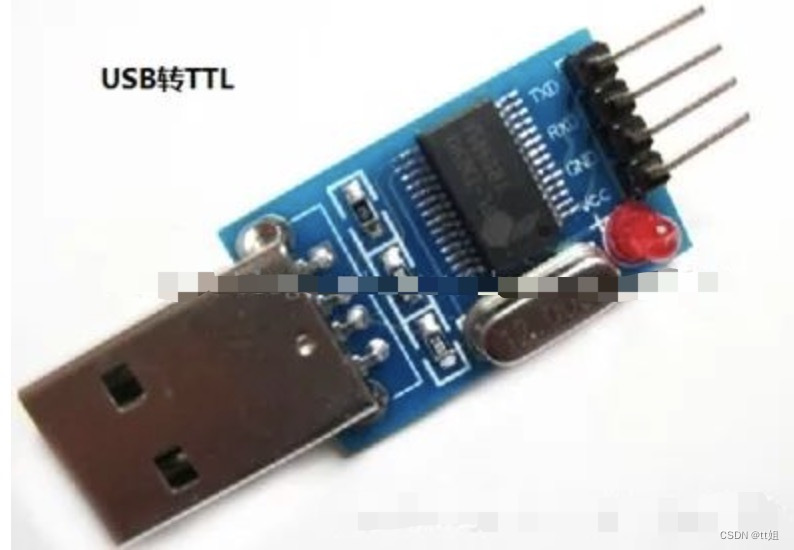
用串口通信比USB简单,因为串口通信没有协议。
SD卡
SD卡是一种存储卡,可用于手机作为内存卡使用。
嵌入式中,单片机与SD卡通信有两种模式:
-
SPI总线通信模式
-
SD总线通信模式
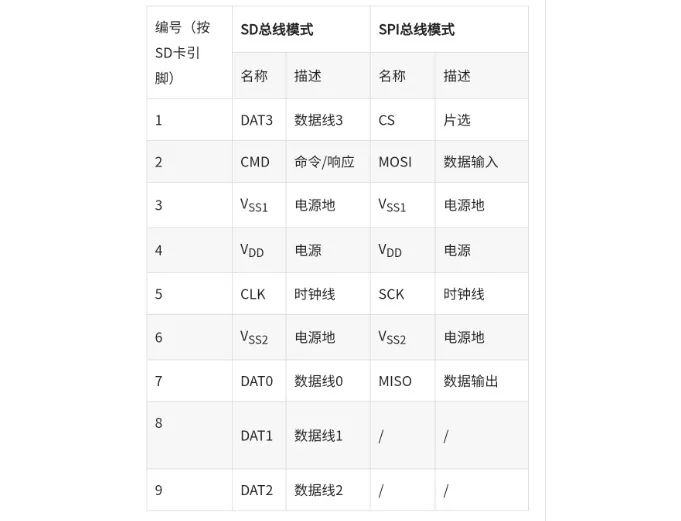
值得注意的是,SD总线模式中有4条数据线;SPI总线模式中仅有一条数据线(MOSI和MISO不能同时读数据,也不能同时写数据);这样在嵌入式中,单片机与SD卡通信时采用SD总线模式比SPI总线模式速度快几倍。

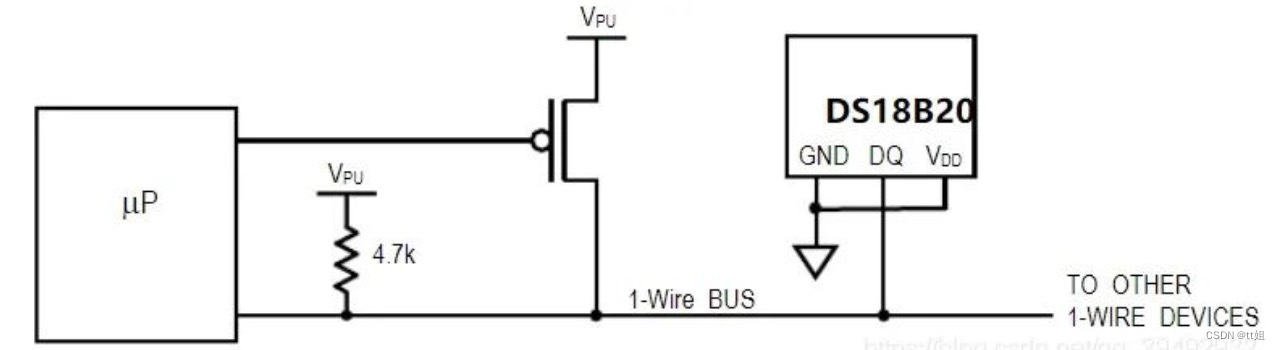
1-WIRE总线
1-Wire由美国Dallas(达拉斯)公司推出,是一种异步半双工串行传输。采用单根信号线,既传输时钟又传输数据,而且数据传输是双向的。
单总线的数据传输速率一般为16.3Kbit/s,最大可达142 Kbit/s,通常情况下采用100Kbit/s以下的速率传输数据。
1-Wire线端口为漏极开路或三态门的端口,因此一般需要加上拉电阻Rp,通常选用5K~10KΩ
主要应用在:打印墨盒或医疗消耗品的识别;印刷电路板、配件及外设的识别和认证。
DMA直接存储器访问
DMA是STM32内的一个硬件模块,相关文章:详解STM32中的DMA原理。它独立于CPU,在外围设备和内存之间进行数据传输,解放了CPU,可使CPU的效率大大提高。

它可以高速访问外设、内存,传输不受CPU的控制,并且是双向通信。因此,使用DMA可以大大提高数据传输速度,这也是ARM架构的一个亮点——DMA总线控制。
DMA就相应于一条高速公路,专用、高速的特性。如果不使用DMA,也可以达到目的,只是达到目的的时间比较长。
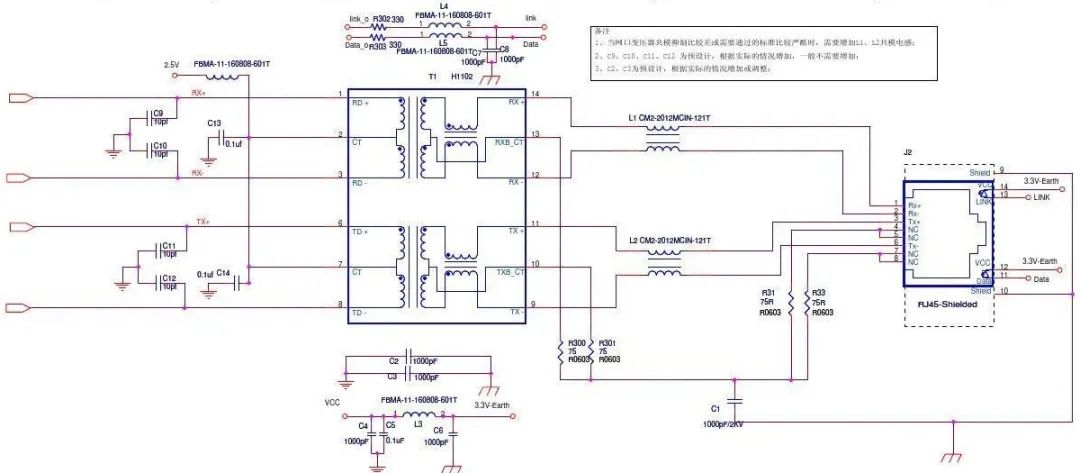
Ethernet以太网
以太网是目前应用最普遍的局域网技术。
大家知道,以太网接口可分为协议层和物理层。
协议层是由一个叫MAC(Media Access Layer)控制器的单一模块实现。
物理层由两部分组成,即PHY(Physical Layer)和传输器。
目前很多主板的南桥芯片已包含了以太网MAC控制功能,只是未提供物理层接口。因此,需外接PHY芯片以提供以太网的接入通道。

网络变压器的作用是:
-
耦合差分信号,抗干扰能力更强
-
变压器隔离网线端不同设备的不同电平,隔离直流信号
以太网接口参考电路,如下图所示。
二、总结电子工程师踩过的坑
电子工程师指从事各类电子设备和信息系统统研究、教学、产品设计、科技开发、生产和管理等工作的高级工程技术人才。一般分为硬件工程师和软件工程师。whaosoft aiot http://143ai.com
硬件工程师:
主要负责电路分析、设计;并以电脑软件为工具进行PCB设计,待工厂PCB制作完毕并且焊接好电子元件之后进行测试、调试;
软件工程师:
主要负责单片机、DSP、ARM、FPGA等嵌入式程序的编写及调试。FPGA程序有时属硬件工程师工作范畴。
错误一:
这些拉高/拉低的电阻用多大的阻值关系不大,就选个整数5K吧
点评:
市场上不存在5K的阻值,最接近的是 4.99K(精度1%),其次是5.1K(精度5%),其成本分别比精度为20%的4.7K高4倍和2倍。20%精度的电阻阻值只有1、1.5、2.2、 3.3、4.7、6.8几个类别(含10的整数倍);类似地,20%精度的电容也只有以上几种值,如果选了其它的值就必须使用更高的精度,成本就翻了几 倍,却不能带来任何好处。
错误二:
这部分电路只要要求软件这样设计就不会有问题
点评:
硬件上很多电气特性直接受软件控制,但软件是经常发生意外的,程序跑飞了之后无法预料会有什么操作。设计者应确保不论软件做什么样的操作硬件都不应在短时间内发生永久性损坏。
错误三:
这点逻辑用74XX的门电路搭也行,但太土,还是用CPLD吧,显得高档多了
点评:
74XX的门电路只几毛钱,而CPLD至少也得几十块。成本提高了N倍不说,还给生产、文档等工作增添数倍的工作。
错误四:
这板子的PCB设计要求不高,就用细一点的线,自动布吧
点评:
自动布线必然要占用更大的PCB面积,同时产生比手动布线多好多倍的过孔,在批量很大的产品中,PCB厂家降价所考虑的因素除了商务因素外,就是线宽和过孔数量,它们分别影响到PCB的成品率和钻头的消耗数量,节约了供应商的成本,也就给降价找到了理由。
错误五:
我们这系统是220V供电,就不用在乎功耗问题了
点评:
低功耗设计并不仅仅是为了省电,更多的好处在于降低了电源模块及散热系统的成本、由于电流的减小也减少了电磁辐射和热噪声的干扰。随着设备温度的降低,器件寿命则相应延长(半导体器件的工作温度每提高10度,寿命则缩短一半)。
错误六:
这些总线信号都用电阻拉一下,感觉放心些
点评:
信号需要上下拉的原因很多,但也不是个个都要拉。上下拉电阻拉一个单纯的输入信号,电流也就几十微安以下,但拉一个被驱动了的信号,其电流将达毫安 级,现在的系统常常是地址数据各32位,可能还有244/245隔离后的总线及其它信号,都上拉的话,几瓦的功耗就耗在这些电阻上了(不要用8毛钱一度电 的观念来对待这几瓦的功耗)。
错误七:
CPU和FPGA的这些不用的I/O口怎么处理呢?先让它空着吧,以后再说
点评:
不用的I/O口如果悬空的话,受外界的一点点干扰就可能成为反复振荡的输入信号了,而MOS器件的功耗基本取决于门电路的翻转次数。如果把它上拉的话,每个引脚也会有微安级的电流,所以最好的办法是设成输出(当然外面不能接其它有驱动的信号)。
错误八:
这款FPGA还剩这么多门用不完,可尽情发挥吧
点评:
FGPA的功耗与被使用的触发器数量及其翻转次数成正比,所以同一型号的FPGA在不同电路不同时刻的功耗可能相差100倍。尽量减少高速翻转的触发器数量是降低FPGA功耗的根本方法。
错误九:
这些小芯片的功耗都很低,不用考虑
点评:
对于内部不太复杂的芯片功耗是很难确定的,它主要由引脚上的电流确定,一个ABT16244,没有负载的话耗电大概不到1毫安,但它的指标是每个脚可 驱动60毫安的负载(如匹配几十欧姆的电阻),即满负荷的功耗最大可达60*16=960mA,当然只是电源电流这么大,热量都落到负载身上了。
错误十:
存储器有这么多控制信号,我这块板子只需要用OE和WE信号就可以了,片选就接地吧,这样读操作时数据出来得快多了
点评:
大部分存储器的功耗在片选有效时(不论OE和WE如何)将比片选无效时大100倍以上,所以应尽可能使用CS来控制芯片,并且在满足其它要求的情况下尽可能缩短片选脉冲的宽度。
错误十一:
这些信号怎么都有过冲啊?只要匹配得好,就可消除了
点评:
除了少数特定信号外(如100BASE-T、CML),都是有过冲的,只要不是很大,并不一定都需要匹配,即使匹配也并非要匹配得最好。象TTL的输 出阻抗不到50欧姆,有的甚至20欧姆,如果也用这么大的匹配电阻的话,那电流就非常大了,功耗是无法接受的,另外信号幅度也将小得不能用,再说一般信号 在输出高电平和输出低电平时的输出阻抗并不相同,也办法做到完全匹配。所以,TTL、LVDS、422等信号的匹配只要做到过冲可以接受即可。
错误十二:
降低功耗都是硬件人员的事,与软件没关系
点评:
硬件只是搭个舞台,唱戏的却是软件,总线上几乎每一个芯片的访问、每一个信号的翻转差不多都由软件控制的,如果软件能减少外存的访问次数(多使用寄存 器变量、多使用内部CACHE等)、及时响应中断(中断往往是低电平有效并带有上拉电阻)及其它争对具体单板的特定措施都将对降低功耗作出很大的贡献。
错误十三:
这主频100M的CPU只能处理70%,换200M主频的就没事了
点评:
系统的处理能力牵涉到多种多样的因素,在通信业务中其瓶颈一般都在存储器上,CPU再快,外部访问快不起来也是徒劳。
错误十四:
CPU用大一点的CACHE,就应该快了
点评:
CACHE的增大,并不一定就导致系统性能的提高,在某些情况下关闭CACHE反而比使用CACHE还快。原因是搬到CACHE中的数据必须得到多次 重复使用才会提高系统效率。所以在通信系统中一般只打开指令CACHE,数据CACHE即使打开也只局限在部分存储空间,如堆栈部分。同时也要求程序设计 要兼顾CACHE的容量及块大小,这涉及到关键代码循环体的长度及跳转范围,如果一个循环刚好比CACHE大那么一点点,又在反复循环的话,那就惨了。
错误十五:
一个CPU处理不过来,就用两个分布处理,处理能力可提高一倍
点评:
对于搬砖头来说,两个人应该比一个人的效率高一倍;对于作画来说,多一个人只能帮倒忙。使用几个CPU需对业务有较多的了解后才能确定,尽量减少两个CPU间协调的代价,使1+1尽可能接近2,千万别小于1。
错误十六:
这个CPU带有DMA模块,用它来搬数据肯定快
点评:
真正的DMA是由硬件抢占总线后同时启动两端设备,在一个周期内这边读,那边些。但很多嵌入CPU内的DMA只是模拟而已,启动每一次DMA之前要做 不少准备工作(设起始地址和长度等),在传输时往往是先读到芯片内暂存,然后再写出去,即搬一次数据需两个时钟周期,比软件来搬要快一些(不需要取指令, 没有循环跳转等额外工作),但如果一次只搬几个字节,还要做一堆准备工作,一般还涉及函数调用,效率并不高。所以这种DMA只对大数据块才适用。
错误十七:
为保证干净的电源,去偶电容是多多益善
点评:
总的来说去偶电容越多电源当然会更平稳,但太多了也有不利因素:浪费成本、布线困难、上电冲击电流太大等。去偶电容的设计关键是要选对容量并且放对地方,一般的芯片手册都有争对去偶电容的设计参考,最好按手册去做。
错误十八:
用户操作错误发生问题就不能怪我了
点评:
要求用户严格按手册操作是没错的,但用户是人,就有犯错的时候,不能说碰错一个键就死机,插错一个插头就烧板子。所以对用户可能犯的各种错误必须加以保护。
错误十九:
这板子坏的原因是对端的板子出问题了,也不是我的责任
点评:
对于各种对外的硬件接口应有足够的兼容性,不能因为对方信号不正常,你就歇着了。它不正常只应影响到与其有关的那部分功能,而其它功能应能正常工作,不应彻底罢工,甚至永久损坏,而且一旦接口恢复,你也应立即恢复正常。。
错误二十:
我们的系统要求这么高,包括MEM、CPU、FPGA等所有的芯片都要选最快的
点评:
在一个高速系统中并不是每一部分都工作在高速状态,而器件速度每提高一个等级,价格差不多要翻倍,另外还给信号完整性问题带来极大的负面影响。
三、嵌入式开发中RTOS的作用
嵌入式系统中,有很多方式实现任务调度。功能有限的小系统中,无限循环足够实现系统功能。当软件设计变得庞大且复杂时,设计师应该考虑使用RTOS(实时操作系统),RTOS相关文章:STM32嵌入式开发中的RTOS,你用过哪些?
下面给大家分享使用RTOS的8个理由:
硬实时响应
基于优先级抢占的RTOS,根据任务的实时需求,执行优先调度。有严格时序限制的任务可以优先执行,提高应用程序对时间关键事件的响应。延庆川北小区45孙老师 收卖废品破烂垃圾炒股 废品孙 再回收
系统性能最大化
针对大型的、复杂的嵌入式应用,使用一个事件驱动的RTOS,来替代基于轮询的超循环结构,可以生成一个更有效的设计,更小的存储占用,应用可以获得更多的处理器时间,相关文章推荐:分享两种单片机编程思想。
降低复杂度
RTOS允许应用划分为一个个小的自主运行的任务。任务执行自己的上下文中,不依赖其它任务或调度器。
高峰负载管理
RTOS提供了为管理系统高峰活动提供了一个有效的方法。更高的优先级分配给执行峰值负载活动的任务,确保他们在临界时间内访问处理器,在此期间,较低优先级的任务被延迟。
紧密集成的中间件
RTOS的模块化设计使得它可以很容易的增加中间件。中间件组件以任务和驱动的方式增加。他们使用RTOS提供的资源与其它任务通信。基于相应的事件被RTOS调度。
更大的开发团队
每个任务可以被认为是一个项目。通过RTOS提供的资源(队列、信号量等)来定义输入输出。将系统定义为一个个的任务,可以更容易的部署更多开发人员到一个项目。
易于调试和验证
系统划分为功能明确的任务,不依赖其它任务。在整个系统集成之前,可以很容易的调试和验证每个任务。
代码重用
RTOS系统中的模块化设计,鼓励将软件功能创建为独立的、验证过的任务。其独立性使得在其它设计中重用这些模块变得很简单。