H264编码(帧内预测)
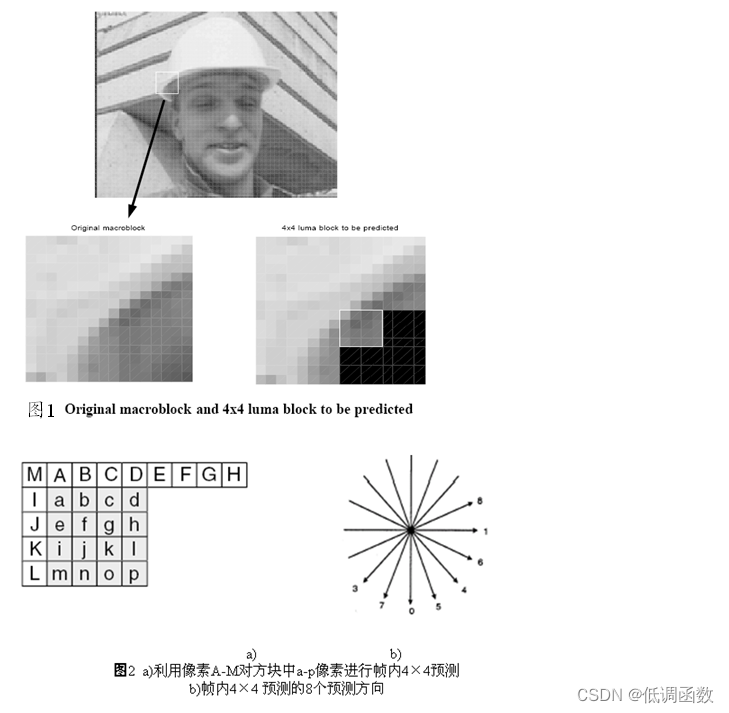
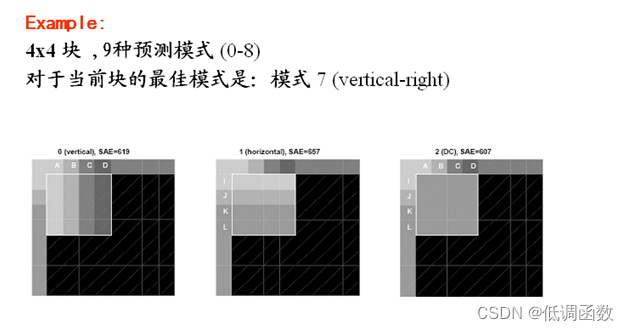
在帧内预测模式中,预测块P是基于已编码重建块和当前块形成的。对亮度像素而言,P块用于4×4子块或者16×16宏块的相关操作。4×4亮度子块有9种可选预测模式,独立预测每一个4×4亮度子块,适用于带有大量细节的图像编码;16×16亮度块有4种预测模式,预测整个16×16亮度块,适用于平坦区域图像编码;色度块也有4种预测模式,类似于16×16亮度块预测模式。编码器通常选择使P块和编码块之间差异最小的预测模式。
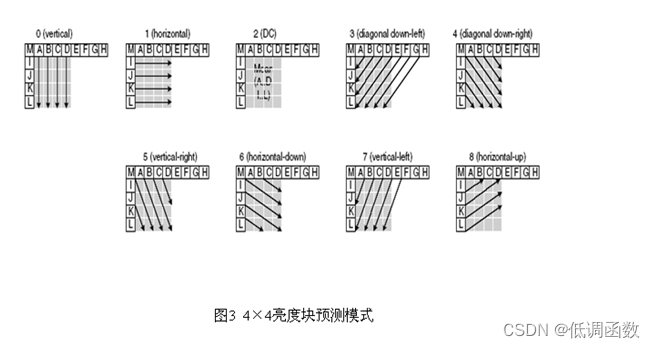
4×4亮度预测模式
如图6.14所示,4×4亮度块的上方和左方像素A~M为已编码和重构像素,用作编解码器中的预测参考像素。a~p为待预测像素,利用A~M值和9种模式实现。其中模式2(DC预测)根据A~M中已编码像素预测,而其余模式只有在所需预测像素全部提供才能使用。图6.15箭头表明了每种模式预测方向。对模式3~8,预测像素由A~M加权平均而得。例如,模式4中,d=round(B/4+C/2+D/4)。
| 模式 | 描 述 |
|---|---|
| 模式0(垂直) | 由A、B、C、D 垂直推出相应像素值 |
| 模式1(水平) | 由I、J、K、L 水平推出相应像素值 |
| 模式2(DC) | 由A~D 及I~L 平均值推出所有像素值 |
| 模式3(下左对角线) | 由45°方向像素内插得出相应像素值 |
| 模式4(下右对角线) | 由45°方向像素内插得出相应像素值 |
| 模式5(右垂直) | 由26.6°方向像素值内插得出相应像素值 |
| 模式6(下水平) | 由26.6°方向像素值内插得出相应像素值 |
| 模式7(左垂直) | 由26.6° 方向像素值内插得出相应像素值 |
| 模式8(上水平) | 由26.6° 方向像素值内插得出相应像素值 |
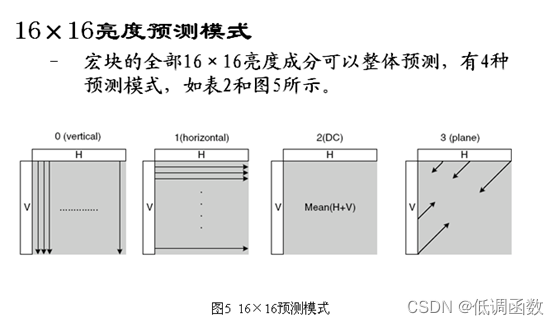
16×16预测模式
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-5Rt0ISof-1690336701808)(img/18.png)]](https://img-blog.csdnimg.cn/331df8e51c6d4907952d35a57a63238a.png)
| 模式 | 描 述 |
|---|---|
| 模式0(垂直) | 由上边像素推出相应像素值 |
| 模式1(水平) | 由左边像素推出相应像素值 |
| 模式2(DC) | 由上边和左边像素平均值推出相应像素值 |
| 模式3(平面) | 利用线形“plane”函数及左、上像素推出相应像素值,适用于亮度变化平缓区域 |
8×8色度块预测模式
每个帧内编码宏块的8×8色度成分由已编码左上方色度像素预测而得,两种色度成分常用同一种预测模式。
4种预测模式类似于帧内16×16预测的4种预测模式,只是模式编号不同。其中DC(模式0)、水平(模式1)、垂直(模式2)、平面(模式3)。
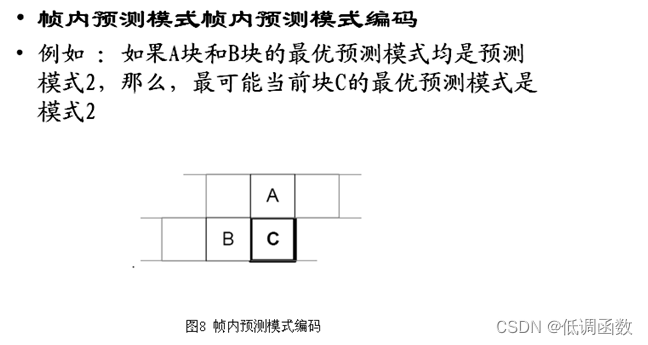
对于当前块C, 编解码器按照如下方法计算
probableprediction mode=
min{prediction mode of A, predictionmodes of B}
当A (或者 B)的预测模式不可用时,
prediction mode of A= 2.
例如
A 和 B块的预测模式分别为 3 和1
most probable mode for block C =1
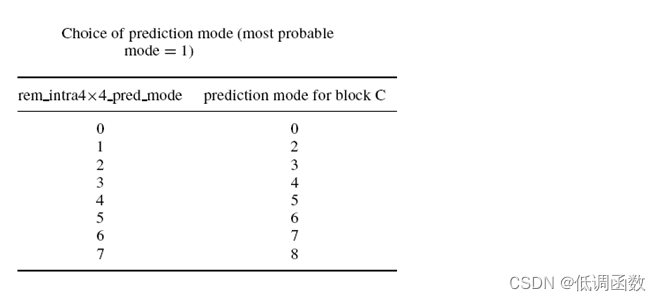
编码器为每个4x4 块发送一个标记 flag,解码器按照如下方式 解码
Ifflag==1, prediction mode=most_probable_mode
Ifflag==0
If rem_intra4×4_pred_mode< most_probable_mode
prediction mode=rem_intra4×4_pred_mode
else
prediction mode=rem_intra4×4_pred_mode+1
这样表示9中预测模式只需要8个值 (0 to 7)