原文链接:点击打开链接
摘要: 1.什么是ROS? 是一款帮助阿里云用户简化云计算资源管理和自动化运维的服务,其本质是一个UTF8 编码的json格式的文件。 2.应用场景: 3.ROS限制和约束: 每个堆栈允许创建的最大资源数(云服务资源,ECS/RDS….
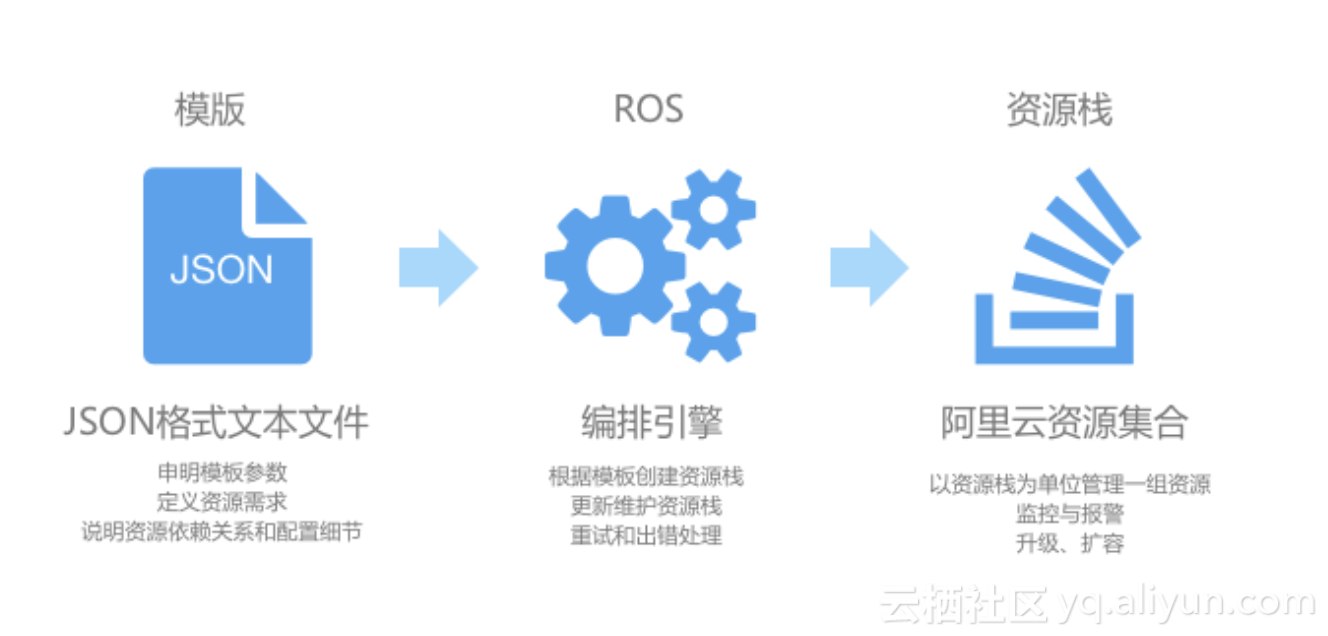
1.什么是ROS?
是一款帮助阿里云用户简化云计算资源管理和自动化运维的服务,其本质是一个UTF8 编码的json格式的文件。
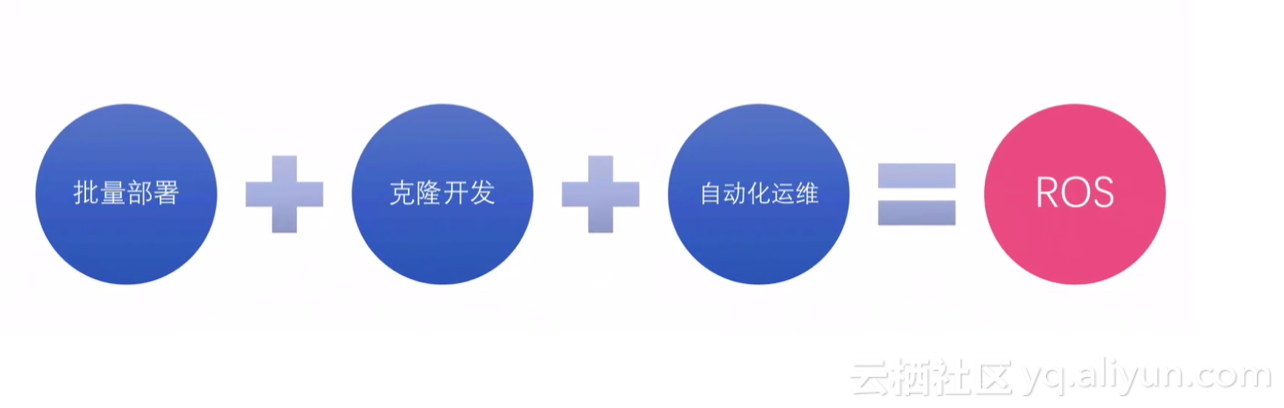
2.应用场景:
3.ROS限制和约束:
- 每个堆栈允许创建的最大资源数(云服务资源,ECS/RDS…..)为200个
- 每个用户允许创建的堆栈数最大为50个
- 每个模版的大小为512kb
4.ROS支持与费用:
目前阿里云支持12种产品和服务 ,分别为:“云服务器ECS/RDS/VPC/SLB/OSS/ESS/EIP/MongoDB/Redis/Memcache/SLS/RAM
费用问题:ROS无需为资源编排(ros)支付额外的费用,只需要支付资源栈内所包含阿里云资源的费用
5.管理方式:控制台/CLI/SDK/API 四种方式进行资源栈的部署和更新。
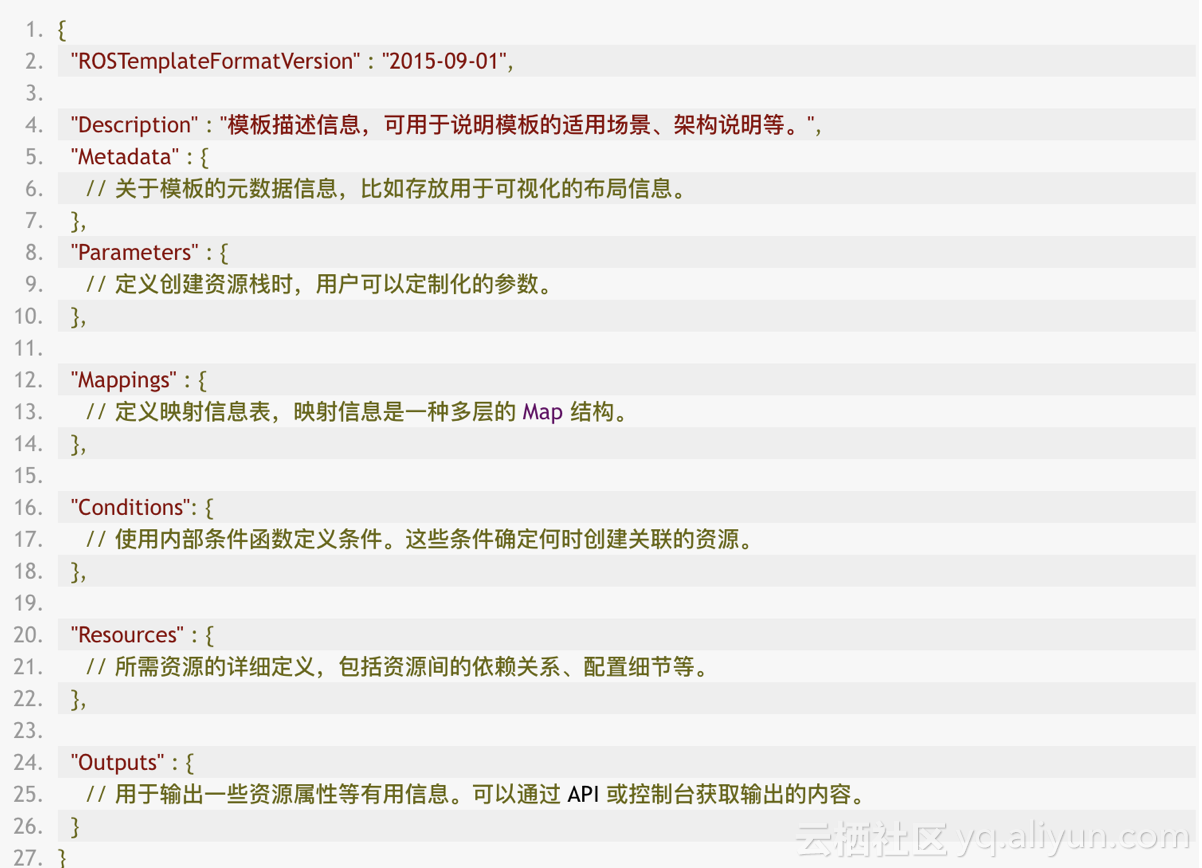
6.ROS模版结构详解
7.专业术语:
ROSTemplateFormatVersion(必填)
ROS支持的模版版本号
Description(可选)
创建的模版的描述信息,用于描述创建的模版主要架构,适用场景是怎么样的。
Metadata(可选)
用于存放与模版相关的元数据信息
Parameters(可选)
创建资源栈时,用户自定义的参数,定义要创建产品的参数类型是怎么样的。
Mappings(可选)
定义了一个多层的映射表,可以通过Fn::FindlnMap函数来选择key对应的值。
Conditions(可选)
在创建资源时,先使用Fn:And,Fn::Or, Fn::Equals内部条件函数定义条件,然后再创建资源,创建与true条件相关联的所有资源,忽略与falase条件关联的所有资源。
Resources(可选)
定义所需要的资源,包含资源间的依赖关系及细节配置
Outputs(可选)
用于输出一些资源属性等信息。
8.最佳实战
问题:在创建资源栈,指定参数密码的时候,由于只需输入一次密码,有可能由于手误输入一个错误的密码,导致已创建的ECS实例等产品,无法进行登陆
解决方法:
在编辑资源栈模版时,指定参数属性Confirm为true来解决这个问题。
具体方法如下:
1.在编辑模版时,增加一个“Confirm”:ture。
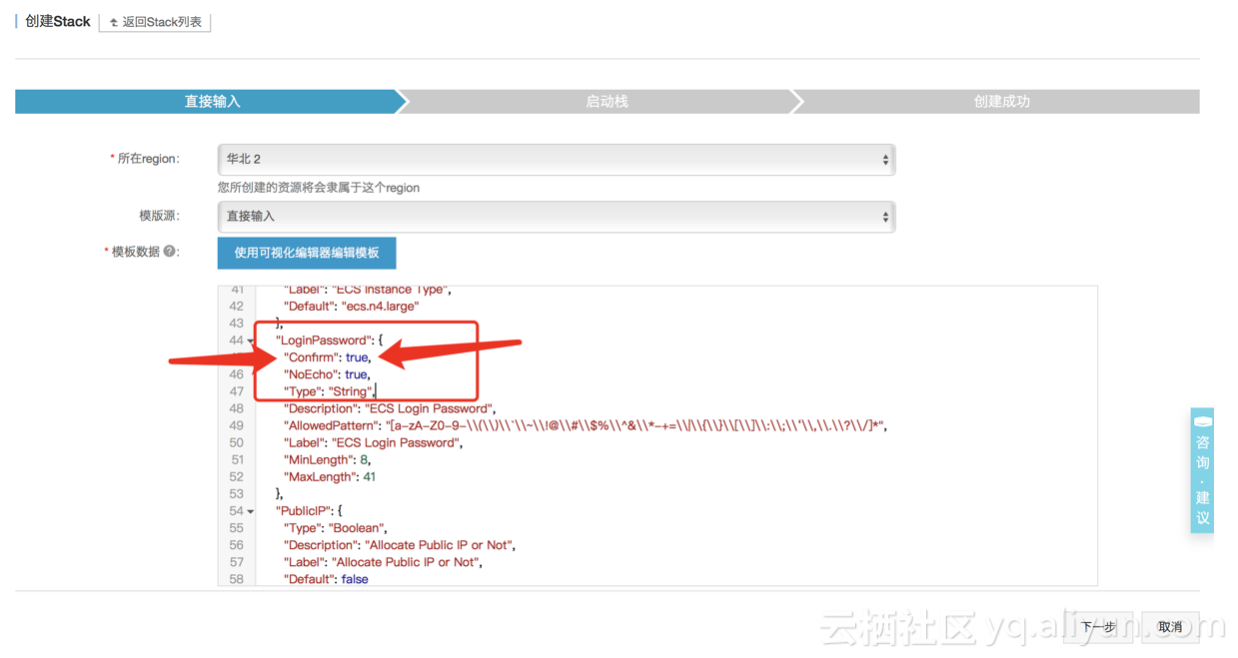
2.在创建资源栈时,启动栈页面中可以看到我们定义的二次密码。
