ResNet
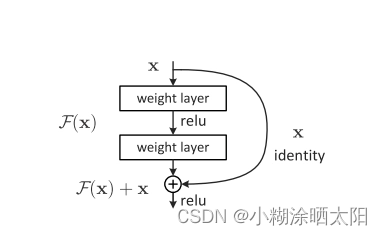
ResNet也叫残差网络,容易优化,并且能够通过增加相当的深度来提高准确率。其内部的残差块使用了跳跃连接,缓解了在深度网络中增加深度带来的梯度消失问题。一下是残差函数和残差学习。
ResNeXt
ResNeXt是ResNet和Inception的结合体。ResNeXt提出了一种介于普通卷积核深度可分离卷积的这种策略:分组卷积,通过控制分组的数量(基数)来达到两种策略的平衡。
猫狗大战实操
首先创建VGG模型
model_vgg = models.vgg16(pretrained=True)
with open('./imagenet_class_index.json') as f:
class_dict = json.load(f)
dic_imagenet = [class_dict[str(i)][1] for i in range(len(class_dict))]
inputs_try , labels_try = inputs_try.to(device), labels_try.to(device)
model_vgg = model_vgg.to(device)
outputs_try = model_vgg(inputs_try)
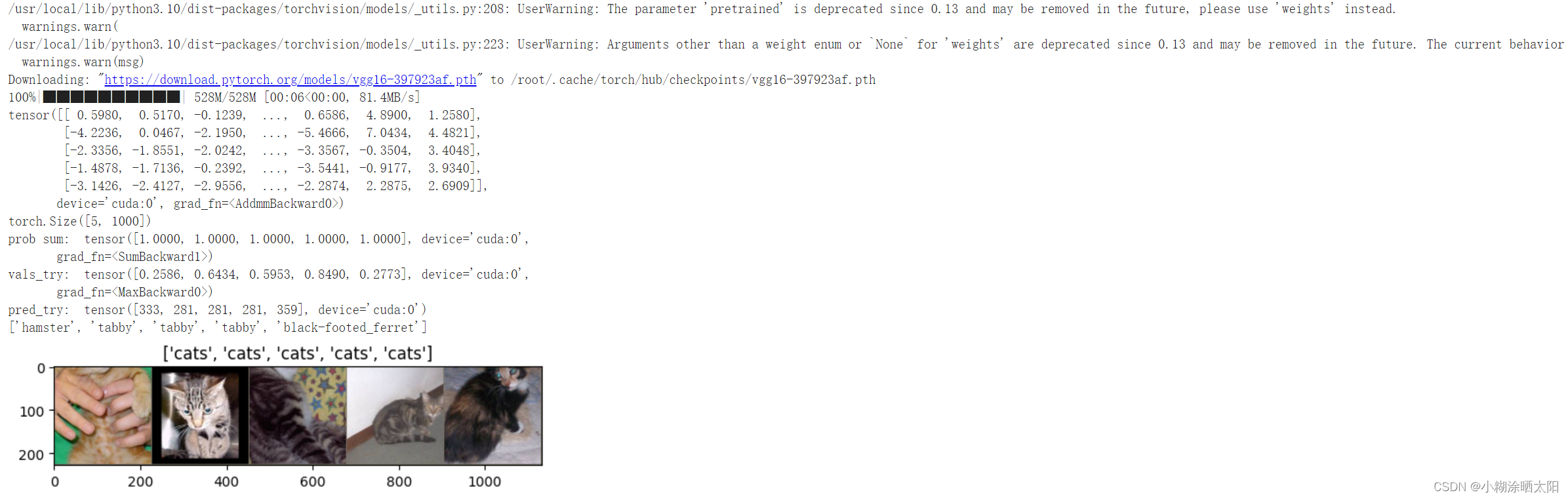
print(outputs_try)
print(outputs_try.shape)
'''
可以看到结果为5行,1000列的数据,每一列代表对每一种目标识别的结果。
但是我也可以观察到,结果非常奇葩,有负数,有正数,
为了将VGG网络输出的结果转化为对每一类的预测概率,我们把结果输入到 Softmax 函数
'''
m_softm = nn.Softmax(dim=1)
probs = m_softm(outputs_try)
vals_try,pred_try = torch.max(probs,dim=1)
print( 'prob sum: ', torch.sum(probs,1))
print( 'vals_try: ', vals_try)
print( 'pred_try: ', pred_try)
print([dic_imagenet[i] for i in pred_try.data])
imshow(torchvision.utils.make_grid(inputs_try.data.cpu()),
title=[dset_classes[x] for x in labels_try.data.cpu()])
修改最后一层,冻结前面层的参数
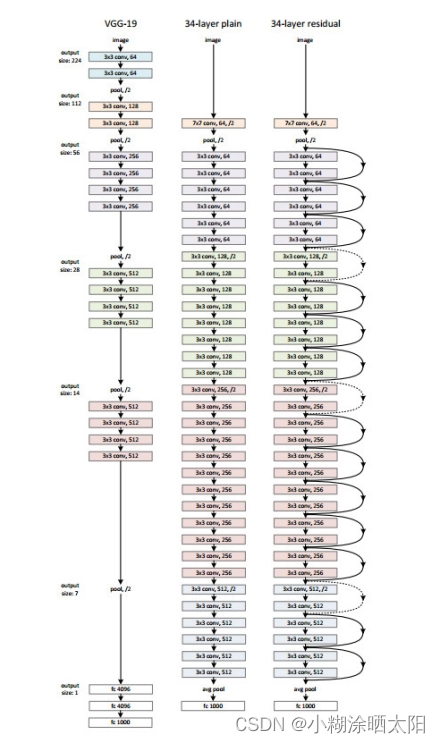
VGG 模型如下图所示,注意该网络由三种元素组成:
- 卷积层(CONV)是发现图像中局部的 pattern
- 全连接层(FC)是在全局上建立特征的关联
- 池化(Pool)是给图像降维以提高特征的 invariance
VGG我们的目标是使用预训练好的模型,因此,需要把最后的 nn.Linear 层由1000类,替换为2类。为了在训练中冻结前面层的参数,需要设置 required_grad=False。这样,反向传播训练梯度时,前面层的权重就不会自动更新了。训练中,只会更新最后一层的参数。
print(model_vgg)
model_vgg_new = model_vgg;
for param in model_vgg_new.parameters():
param.requires_grad = False
model_vgg_new.classifier._modules['6'] = nn.Linear(4096, 2)
model_vgg_new.classifier._modules['7'] = torch.nn.LogSoftmax(dim = 1)
model_vgg_new = model_vgg_new.to(device)
print(model_vgg_new.classifier)
训练并测试全连接层包括三个步骤:第1步,创建损失函数和优化器;第2步,训练模型;第3步,测试模型。
'''
第一步:创建损失函数和优化器
损失函数 NLLLoss() 的 输入 是一个对数概率向量和一个目标标签.
它不会为我们计算对数概率,适合最后一层是log_softmax()的网络.
'''
criterion = nn.NLLLoss()
# 学习率
lr = 0.001
# 随机梯度下降
optimizer_vgg = torch.optim.SGD(model_vgg_new.classifier[6].parameters(),lr = lr)
'''
第二步:训练模型
'''
def train_model(model,dataloader,size,epochs=1,optimizer=None):
model.train()
for epoch in range(epochs):
running_loss = 0.0
running_corrects = 0
count = 0
for inputs,classes in dataloader:
inputs = inputs.to(device)
classes = classes.to(device)
outputs = model(inputs)
loss = criterion(outputs,classes)
optimizer = optimizer
optimizer.zero_grad()
loss.backward()
optimizer.step()
_,preds = torch.max(outputs.data,1)
# statistics
running_loss += loss.data.item()
running_corrects += torch.sum(preds == classes.data)
count += len(inputs)
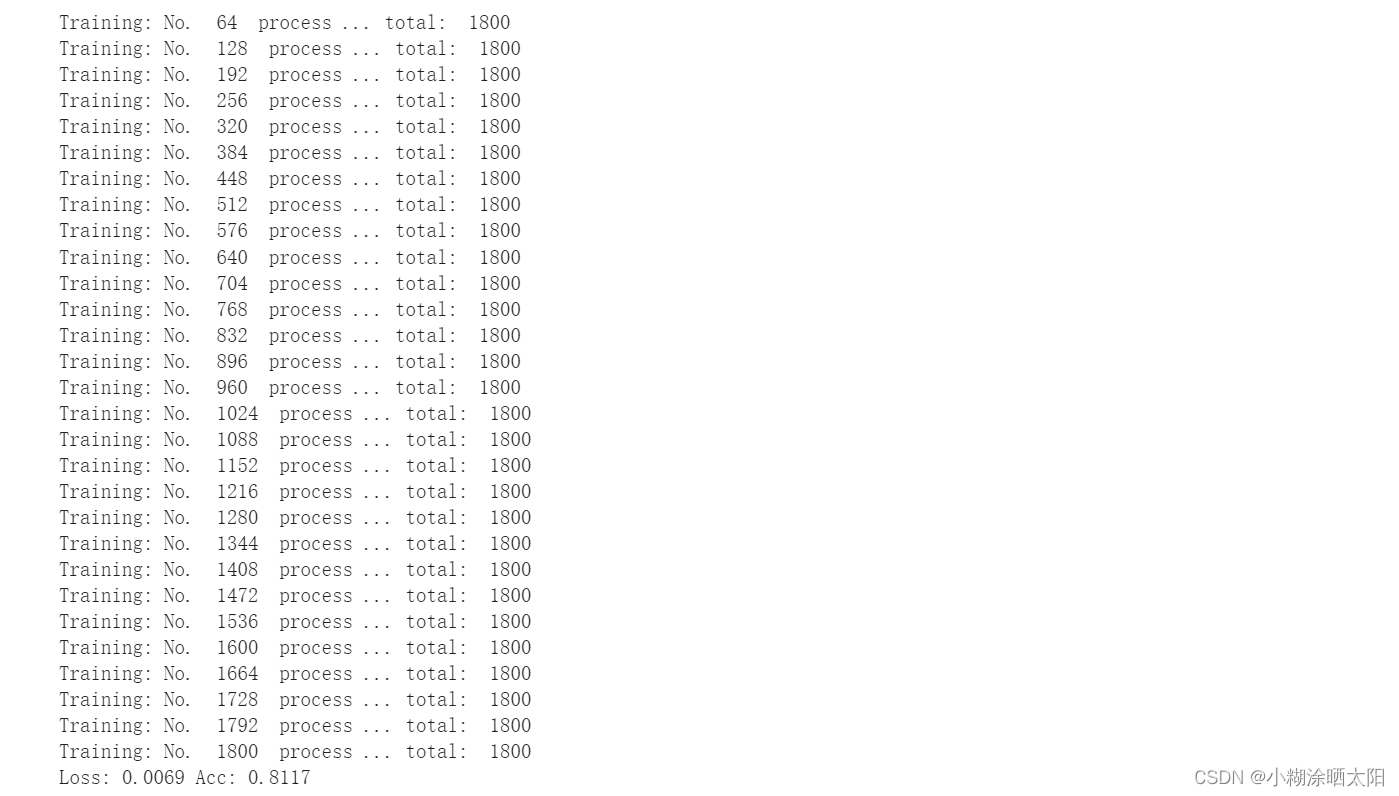
print('Training: No. ', count, ' process ... total: ', size)
epoch_loss = running_loss / size
epoch_acc = running_corrects.data.item() / size
print('Loss: {:.4f} Acc: {:.4f}'.format(
epoch_loss, epoch_acc))
# 模型训练
train_model(model_vgg_new,loader_train,size=dset_sizes['train'], epochs=1,
optimizer=optimizer_vgg)
def test_model(model,dataloader,size):
model.eval()
predictions = np.zeros(size)
all_classes = np.zeros(size)
all_proba = np.zeros((size,2))
i = 0
running_loss = 0.0
running_corrects = 0
for inputs,classes in dataloader:
inputs = inputs.to(device)
classes = classes.to(device)
outputs = model(inputs)
loss = criterion(outputs,classes)
_,preds = torch.max(outputs.data,1)
# statistics
running_loss += loss.data.item()
running_corrects += torch.sum(preds == classes.data)
predictions[i:i+len(classes)] = preds.to('cpu').numpy()
all_classes[i:i+len(classes)] = classes.to('cpu').numpy()
all_proba[i:i+len(classes),:] = outputs.data.to('cpu').numpy()
i += len(classes)
print('Testing: No. ', i, ' process ... total: ', size)
epoch_loss = running_loss / size
epoch_acc = running_corrects.data.item() / size
print('Loss: {:.4f} Acc: {:.4f}'.format(
epoch_loss, epoch_acc))
return predictions, all_proba, all_classes
predictions, all_proba, all_classes = test_model(model_vgg_new,loader_valid,size=dset_sizes['valid'])
最后是可视化模型预测结果(主观分析)
主观分析就是把预测的结果和相对应的测试图像输出出来看看,一般有四种方式:
随机查看一些预测正确的图片
随机查看一些预测错误的图片
预测正确,同时具有较大的probability的图片
预测错误,同时具有较大的probability的图片
最不确定的图片,比如说预测概率接近0.5的图片
# 单次可视化显示的图片个数
n_view = 8
correct = np.where(predictions==all_classes)[0]
from numpy.random import random, permutation
idx = permutation(correct)[:n_view]
print('random correct idx: ', idx)
loader_correct = torch.utils.data.DataLoader([dsets['valid'][x] for x in idx],
batch_size = n_view,shuffle=True)
for data in loader_correct:
inputs_cor,labels_cor = data
# Make a grid from batch
out = torchvision.utils.make_grid(inputs_cor)
imshow(out, title=[l.item() for l in labels_cor])
# 类似的思路,可以显示错误分类的图片,这里不再重复代码
小结
1、Residual learning 的基本原理?
残差在数理统计中是指实际观察值于估计值(拟合值)之间的差。
残差网络的思想就是将网络学习的映射从X到Y转为学习从X到Y-X的差,
然后把学习到的残差信息加到原来的输出上即可。
2、Batch Normailization 的原理,思考 BN、LN、IN 的主要区别。
Batch Normailization(批归一化)是深度学习中非常重要的一个概念,它是一种优化深度神经网络训练的技术,可以加速训练过程,提高模型的准确性。
Batch Normailization的原理是在进行深度神经网络的训练时,每一层的输入都会受到上一层输出的影响而发生变化,使得输入的均值和方差发生变化。
这样,每一层的输出都不再具有稳定性,容易发生梯度消失和梯度爆炸的问题。而BN通过对每个mini-batch的输出进行归一化,使得每一层的输出都具有稳定性,避免上述问题的发生。
具体来说,BN就是在每个mini-batch上对数据进行归一化,将数据按照均值和方差进行标准化,使得数据的均值为0,方差为1.
BN计算均值和标准差时,固定channel(在一个channel内),对HW和batch作平均。
LN计算均值和标准差时,固定batch(在同一个样本内),对HW和channel作平均。
IN计算均值和标准差时,同时固定channel和batch(在同一个样本的一个channel内),对HW作平均。
3、为什么分组卷积可以提升准确率?即然分组卷积可以提升准确率,同时还能降低计算量,分数数量尽量多不行吗?
分组卷积可以减少运算量和参数量,相同输入输出大小的情况下,减少为原来的1/g。
分组卷积可以隔绝不同组的信息交换。
在某些情况下,如每个输出与输入的一部分特征图相关联时,分组卷积可以取得比常规卷积更好的性能,如输出通道为2。但对于需要考虑所有输入特征图信息的情况,分组卷积会降低模型的性能。