
与机器人的交互有很多方式,小伙伴们可根据喜好进行选择。
但实践过程中我们发现对于初学者来说配置ROS开发环境可能有一定挑战,于是我们准备了方便快捷的Ubuntu系统U盘,包含了安装好的ROS和配置好的开发环境。小伙伴们拿到手就可以插入电脑,选择U盘启动进入系统进行操作。简单直接。

不过,随后我们又发现,不同品牌的电脑使用U盘启动系统的方式不太一样,有些还需要进行一些设置,因品牌众多,我们很难对每一种品牌提供具体的支持,并且有些电脑可能也不支持这样的启动方式。
因此,我们这里介绍另一种方式以方便小伙伴们根据情况进行选择。
这个方式就是使用虚拟机。并且我们已尽可能的简化流程。且看下文:
此次教程的开发环境(注意软硬件不同,步骤和设置可能有所不同):
硬件:
-
台式/笔记本电脑
-
研发机器人
软件:
-
Windows 10
-
VirtualBox-7.0.8
-
Ubuntu 18.04
-
ROS melodic
步骤:
1. 安装VirtualBox
首先到 VirtualBox 官方网站下载安装文件,默认安装即可。
https://www.virtualbox.org/wiki/Downloads2. 安装Ubuntu18.04及ROS等或导入配置好的虚拟电脑
到Ubuntu官方网站下载ubuntu-18.04.6-desktop-amd64.iso。
https://releases.ubuntu.com/18.04/可参考官方教程将系统安装到虚拟机。
https://ubuntu.com/tutorials/how-to-run-ubuntu-desktop-on-a-virtual-machine-using-virtualbox#1-overview接着进行ROS melodic的安装以及开发环境的设置以及对应依赖的安装。
http://wiki.ros.org/melodic/Installation/Ubuntu安装过程中可能会有一些小问题,可以根据出现的问题搜索相关解决方法。不过,随着时间的推移有些参考方法可能不再适用,需要不断尝试。
为节省大家时间,将更多精力投入到实际的机器人研发,提高研发效率。我们为大家准备了安装配置好的虚拟电脑。只需进行简单的导入就可以与机器人进行交互了。

如果是使用我们提供的安装配置好的虚拟电脑ova格式文件,则可以跳过以上Ubuntu安装、ROS安装及开发环境配置等步骤,直接按以下方式导入配置好的系统及开发环境:
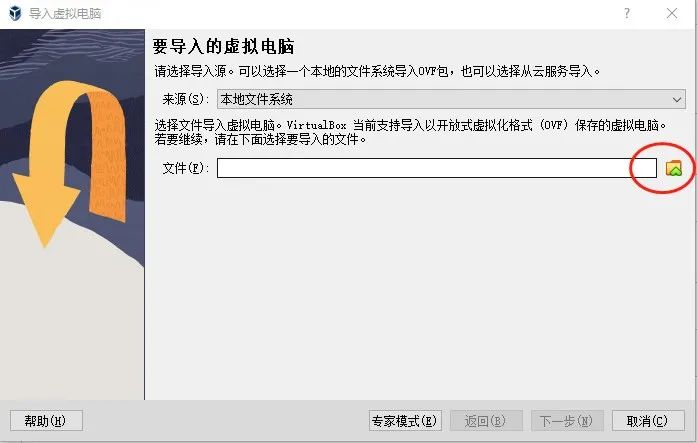
在VirtualBox左上角点击 管理 > 导入虚拟电脑

在弹出的对话框中点击下图所示文件夹图标:
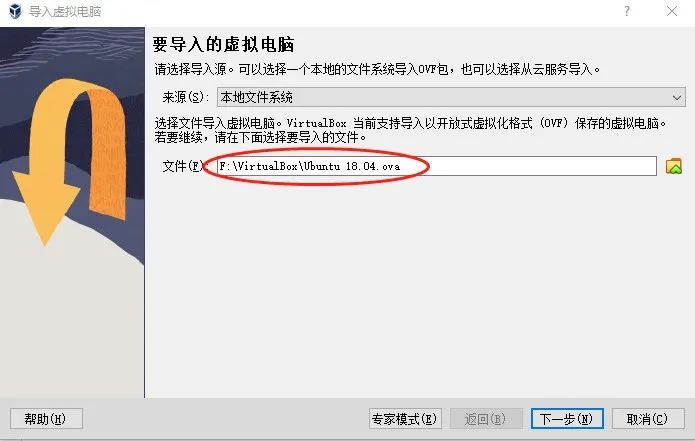
找到存放Ubuntu 18.04.ova的位置,如下所示:
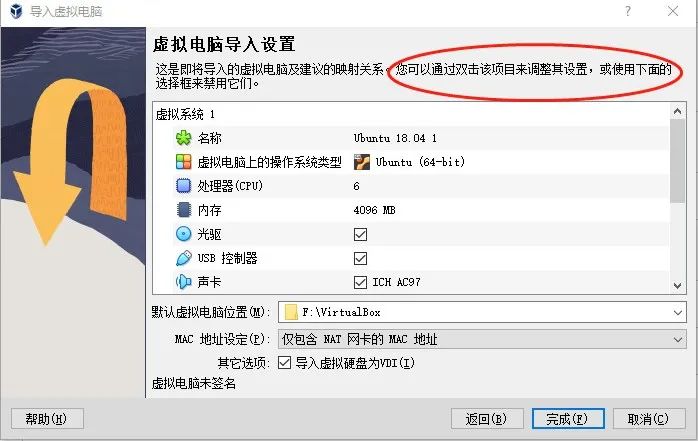
你可以根据具体情况和个人喜好修改各项配置:
这里主要强调一下虚拟电脑位置的设置,因为其会占用的空间较大,请选择一个较大的硬盘存储空间。
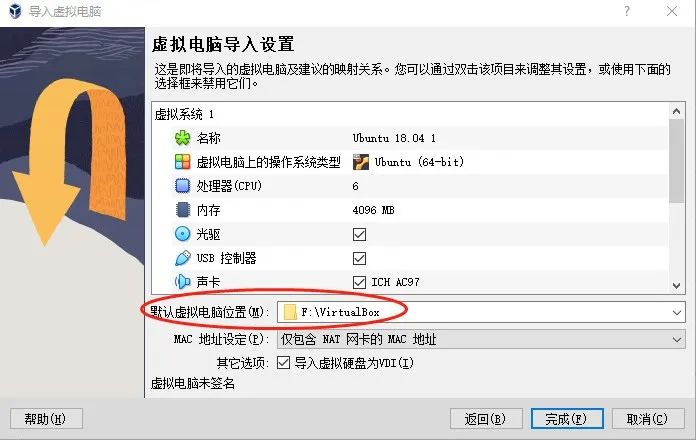
设置好之后就可以点击完成等待导入啦:
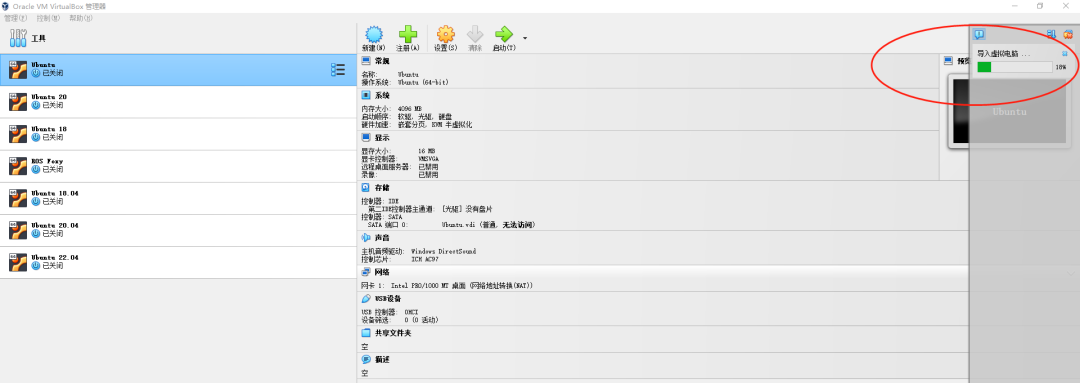
导入成功后就会看到新增的虚拟电脑啦,点击启动就可以使用了:

3. 网络配置
ROS melodic主要通过主从机的方式与机器人进行交互,为实现稳定的网络连接,需要虚拟机连接到机器人的WiFi热点。

这就需要对虚拟机网络模式进行设置。默认为 网络地址转换(NAT)模式,需要变更为 桥接网卡 模式。可通过如下步骤快速变更:
点击如图所示区域:

弹出网络模式选择对话框:

选择 桥接网卡:

也可以在设置处找到网络设置进行相应变更:

然后将你的电脑通过WiFi连接到机器人的WiFi热点,检查主从机配置,确认好之后就可以对机器人进行远程控制、建图、导航等操作了。
小技巧:
在设备栏有一些实用功能,比如USB外设的使用,与主机(注意这里的主机是指安装虚拟机的设备,请勿与机器人上的设备如NVIDIA Jetson与虚拟机构成的机器人主从机混淆)之间的互操作等。比如,你可能需要将主机的文件复制到虚拟机,那么可以按如下所示,简单点击进行设置,就可以将主机的文件拖放到虚拟机,反之亦然。比 共享文件夹 更简单直接。

本期的分享就到这里啦,不足之处,敬请提出意见和建议。欢迎大家一起交流机器人研发的经验与心得。