Eigen库对于很多需要做SLAM、图像、自动驾驶等方向的人肯定不陌生非常值得学习,本文将整理一些Eigen库的使用教程供初学者能够快速熟悉并入门。
首先,有能力的同学请阅读官方文档,这里是最全的教程资料查找地点:
Eigen https://eigen.tuxfamily.org/index.php?title=Main_Page本文主要内容也来自于官网。
https://eigen.tuxfamily.org/index.php?title=Main_Page本文主要内容也来自于官网。
Eigen库最显著的特点是,使用时只需要包含头文件即可(它是纯用头文件搭建起来的库),不需要链接库。从而在使用诸如cmake等工具时,只需要添加 find_package(Eigen3 REQUIRED) 即可,无需link。或者通过include_directories(\eigen-3.4.0)添加包含即可(常在PC中使用)。
这里忽略一下安装流程(非常简单),但请注意工程所依赖的Eigen版本。
首先举一个简短的例子:
#include <iostream>
#include <eigen3/Eigen/Dense> //Dense是最常用的
using namespace std;
using namespace Eigen;
int main()
{
MatrixXd m(2,2);
MatrixXd n(2,2);//MatrixXd 代表X维度(Dynamic)的矩阵
m(0,0) = 3;
m(1,0) = 2.5;
m(0,1) = -1;
m(1,1) = m(1,0) + m(0,1);
n<<1, 1,
1,1; //通过操作符重载赋值
cout << m <<endl;
cout << n <<endl;
}
//输出为
// 3 -1
//2.5 1.5
//1 1
//1 1说明我们的Eigen已经用起来了。那么上面写的 Dense是最常用的,我们包含的时候如何选择呢?
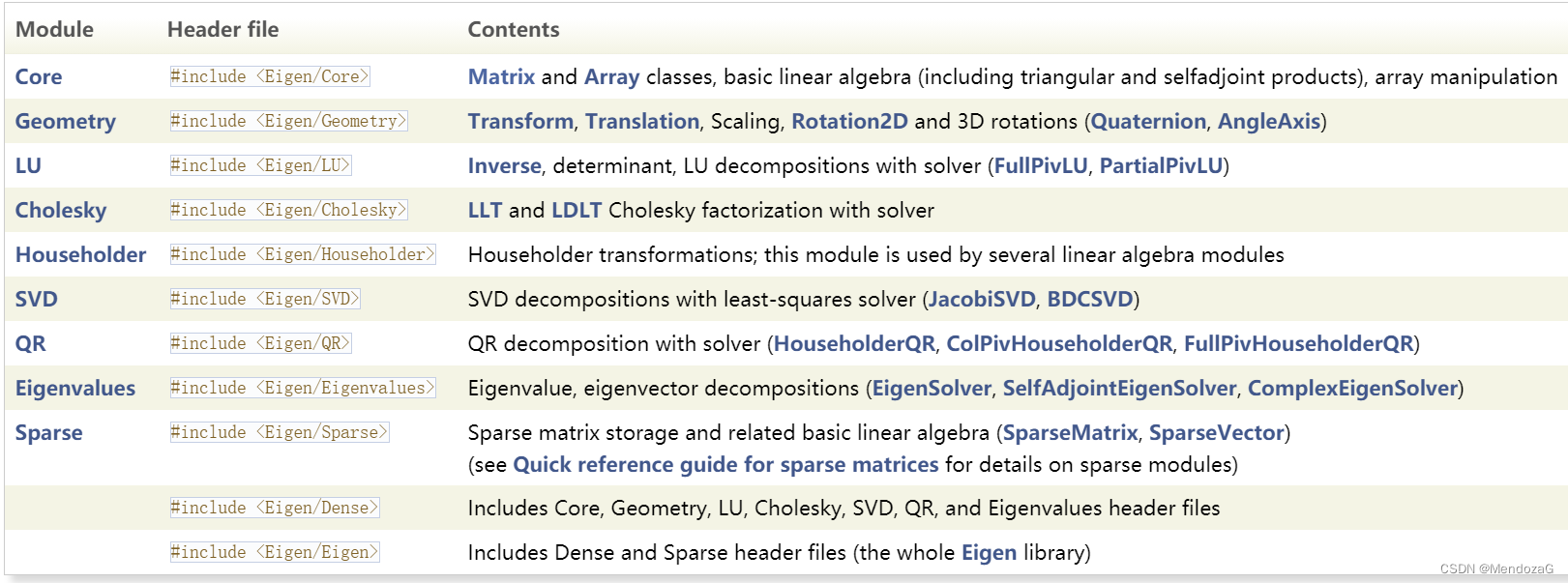
解释如上,所以为什么常常使用Dense呢?因为一个Dense就包含了Core, Geometry, LU, Cholesky, SVD, QR, 以及 Eigenvalues 的头文件。
好,我们继续,Eigen提供了两种dense object 矩阵matrix以及向量vector都用由模板类Matrix表征,对于一维和二维的数组,则由模板Array数组表征,语法如下:
typedef Matrix<Scalar, RowsAtCompileTime, ColsAtCompileTime, Options> MyMatrixType;
typedef Array<Scalar, RowsAtCompileTime, ColsAtCompileTime, Options> MyArrayType; 其中Scalar代表常数的类型,例如float, double, bool, int等等。
RowsAtCompileTime 以及ColsAtCompileTime 代表行列数,或者使用Dynamic,动态
OPtions 可以选择ColMajor or RowMajor 默认是col列排列(也就是行排列还是列排列,互为转置)
合法的写法可以是:
Matrix<double, 6, Dynamic> m1 // 列是动态的,调用堆
Matrix<double, Dynamic, 2> m2 // 行是动态的,调用堆
Matrix<double, Dynamic, Dynamic, RowMajor> m3 // 全动态,调用堆
Matrix<double, 13, 3> m4 // 全是确定的(通常保存在栈上)通常,使用的时候我们不需要这么麻烦,库本身已经提供了许多的typedefs :

我们都知道对于矩阵来说,维度和运算是尤为重要的,那么矩阵和数组都有哪些转换呢?
Array44f a1, a1; //定义两个数组(二维)和两个矩阵
Matrix4f m1, m2;
m1 = a1 * a2; // 共轭乘积,这样两个向量之积为矩阵(4*4)
a1 = m1 * m2; // 两个矩阵相乘,将矩阵转换为向量
a2 = a1 + m1.array(); // 矩阵和向量是不能直接运算的,使用.array()转换
m2 = a1.matrix() + m1; // 或者.Matrix()的显示转换
ArrayWrapper<Matrix4f> m1a(m1); // m1a是m1的指代值得注意的是不同类型的数据类型不能直接计算,需要cast转换 例如 m1.cast<double>() 。
矩阵基本的操作:
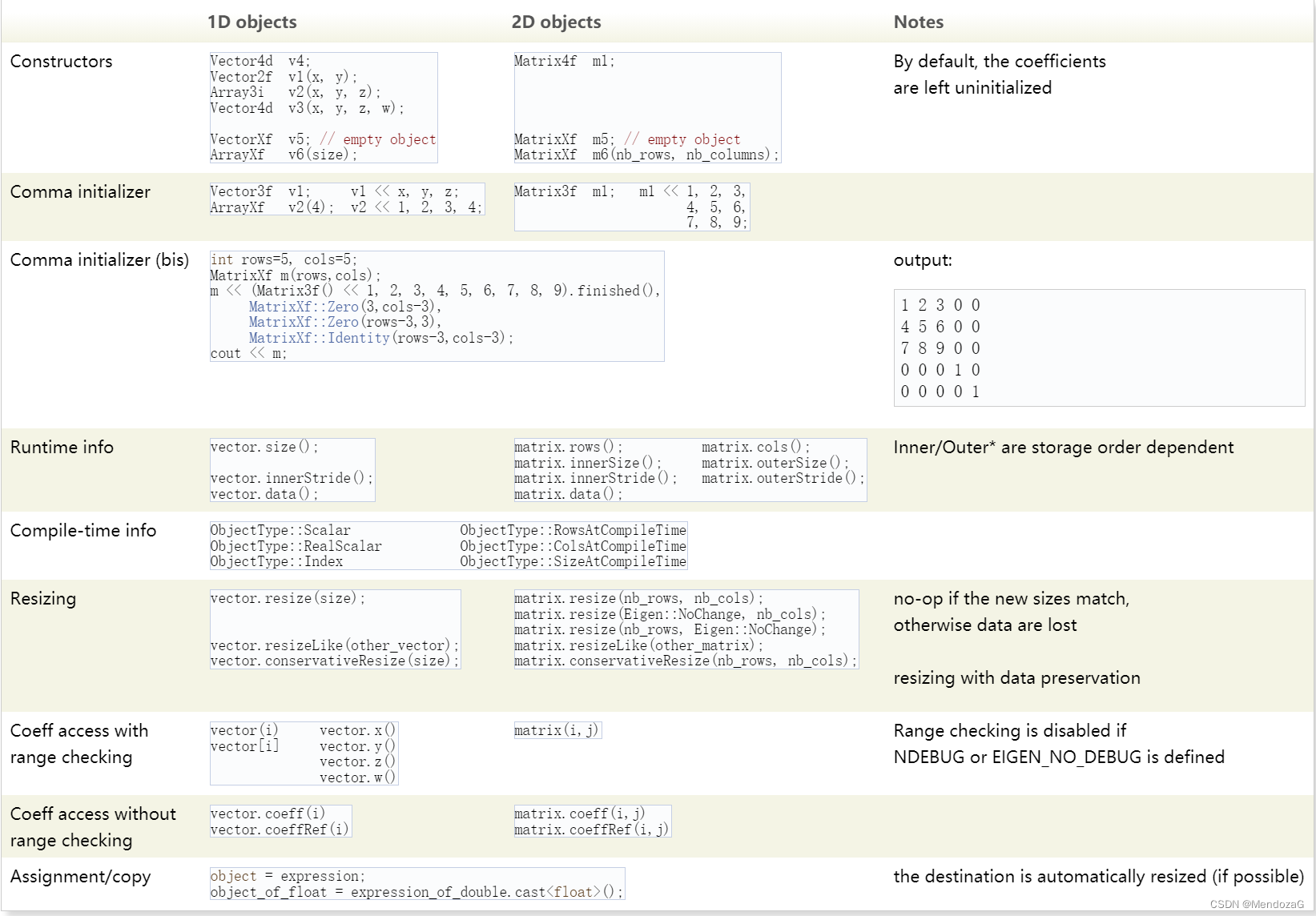
其中需要注意的是 MatrixXf::Zero(m, n) 以及 MatrixXf::Identity(m, n),分别代表全0矩阵和对角线为1的矩阵。
暂且写到这块吧,后续随缘更新~
推荐阅读:(博主总结得很全!)