目录
(1)策略网络的更新
为了最大化策略网络输出的动作在值函数网络中的Q值。DDPG的目标是让策略网络输出的动作能够最大化Q值,即 max θ Q ϕ ( s , μ θ ( s ) ) \max _ {\theta} Q_ {\phi}\left (s, \mu_ {\theta} (s)\right) θmaxQϕ(s,μθ(s)) 其中 θ \theta θ 是策略网络的参数, ϕ \phi ϕ 是值函数网络的参数, μ θ ( s ) \mu_ {\theta} (s) μθ(s) 是策略网络输出的动作。为了使用梯度下降法来更新 \theta ,我们需要求出目标函数对 \theta 的梯度,即 ∇ θ Q ϕ ( s , μ θ ( s ) ) \nabla_ {\theta} Q_ {\phi}\left (s, \mu_ {\theta} (s)\right) ∇θQϕ(s,μθ(s)) 由于Q值是由值函数网络计算的,而不是直接由策略网络输出的,所以我们需要使用链式法则来求出梯度,即 ∇ θ Q ϕ ( s , μ θ ( s ) ) = ∇ a Q ϕ ( s , a ) ∣ a = μ θ ( s ) ⋅ ∇ θ μ θ ( s ) \nabla_ {\theta} Q_ {\phi}\left (s, \mu_ {\theta} (s)\right)=\nabla_ {a} Q_ {\phi}\left (s, a\right) \mid _ {a=\mu_ {\theta} (s)} \cdot \nabla_ {\theta} \mu_ {\theta} (s) ∇θQϕ(s,μθ(s))=∇aQϕ(s,a)∣a=μθ(s)⋅∇θμθ(s) 其中,第一项是Q值对动作的梯度,第二项是策略网络对参数的梯度。为了最大化Q值,我们需要沿着梯度的方向更新参数,即 Δ θ = α ∇ θ Q ϕ ( s , μ θ ( s ) ) \Delta \theta=\alpha \nabla_ {\theta} Q_ {\phi}\left (s, \mu_ {\theta} (s)\right) Δθ=α∇θQϕ(s,μθ(s)) 其中 \alpha 是学习率。
但是在实际的代码实现中,我们通常使用一个损失函数来表示优化目标,并且使用梯度下降法来最小化损失函数。为了与最大化Q值的目标一致,我们需要将损失函数定义为Q值的负数,即 L = − Q ϕ ( s , μ θ ( s ) ) L=-Q_ {\phi}\left (s, \mu_ {\theta} (s)\right) L=−Qϕ(s,μθ(s)) 这样,损失函数对参数的梯度就是Q值对参数的梯度的负数,即 ∇ θ L = − ∇ θ Q ϕ ( s , μ θ ( s ) ) \nabla_ {\theta} L=-\nabla_ {\theta} Q_ {\phi}\left (s, \mu_ {\theta} (s)\right) ∇θL=−∇θQϕ(s,μθ(s)) 那么我们就可以使用梯度下降法来更新参数,即 Δ θ = − α ∇ θ L \Delta \theta=-\alpha \nabla_ {\theta} L Δθ=−α∇θL 这样就相当于沿着Q值对参数的梯度的方向更新参数,从而达到最大化Q值的目标。
(2)更新
价值网络更新:
- next_action=target_actor(next_state)
- target_value=target_critic(next_state,next_acion.detach())
- TD_target=reward + (1.0 - done) * self.gamma * target_value
- now_value=critic(state, action)
- value_loss = nn.MSELoss()(now_value, TD_target.detach())
策略网络更新:
- now_actor=actor(state)
- score_now=critic(state, now_actor)
- policy_loss = -score_now.mean()或-torch.mean(now_score)
注意有负号
(3)NormalizedActions(代码中的)
NormalizedActions是一个类,它的作用是对连续的动作空间进行归一化,使其范围在[-1, 1]之间1。NormalizedActions是一个gym的ActionWrapper,它可以对任何一个gym环境的动作空间进行包装,从而实现动作空间的归一化。NormalizedActions的主要方法有两个:_action和_reverse_action。_action方法是将原始的动作空间映射到[-1, 1]之间,_reverse_action方法是将归一化后的动作空间还原到原始的范围12。NormalizedActions有什么作用呢?一方面,它可以使得不同的环境具有相同的动作空间范围,方便进行算法的测试和比较。另一方面,它可以使得策略网络的输出更加稳定和可控,避免出现过大或过小的动作值3
(4)详解DDPG和AC算法区别!!!
1.DDPG价值网络的输入是状态s和动作a,输出是对这个动作a的打分; AC算法中价值网络的输入是状态 s,输出是每个动作的价值
2. DDPG 是一个基于 Q-learning 和 Policy gradient 的混合算法,它适用于连续动作空间的问题。AC 是一个基于 Policy gradient 的算法,它适用于离散或连续动作空间的问题。
3. DDPG 的 actor 网络是一个确定性的策略网络,它直接输出一个具体的动作,而不是一个动作的概率分布。AC 的 actor 网络可以是一个确定性的或者随机性的策略网络,根据不同的变种而定。
4. DDPG 是一个 off-policy 算法,它使用经验回放缓冲区来存储和重用历史经验。AC 是一个 on-policy 算法,它只使用当前策略产生的经验来更新网络。
(5)详解DDPG和AC的目标网络
- DDPG的目标网络有两个,一个是用来更新Q函数的,另一个是用来更新策略函数的。Q函数的目标网络是基于下一个状态和下一个动作的Q值,而策略函数的目标网络是基于当前状态的最优动作。这两个目标网络都利用了确定性策略梯度定理,这个定理表明,如果动作空间是连续的,那么最优策略也是确定性的,即对于每个状态,只有一个最优动作。因此,DDPG可以用一个神经网络来近似这个确定性策略,并用另一个神经网络来近似Q函数。DDPG在更新策略时,利用了Q函数对动作的梯度信息,从而避免了对每个动作求Q值的开销。
- DDPG不需要遵循当前的策略来生成数据,是因为它使用了一个目标网络来给出一致的目标值。目标网络是Q网络和策略网络的一个延迟版本,它们的参数定期从原始网络复制过来。这样,即使原始网络的参数在不断变化,目标网络的参数也保持相对稳定,从而减少了目标值的波动。因此,DDPG可以使用任何策略下的数据来更新原始网络,而不会导致不稳定的学习 。
- AC算法中的目标网络只有一个,是用来更新价值函数的,而不是策略函数。价值函数的目标值是基于下一个状态的价值,而不是基于下一个动作的Q值。因此,AC算法中的目标网络并不能解决在连续动作空间上求最大Q值的问题。AC算法需要遵循当前的策略来生成数据,是因为它使用了策略梯度定理,这个定理要求数据的分布与当前的策略一致。如果使用了不同策略下的数据,那么策略梯度定理就不再成立,导致学习失败。
(6)其他
- Pendulum-v1的动作空间是一个连续的一维空间,表示施加在摆杆自由端的扭矩,范围是[-2.0, 2.0]。
- Pendulum-v1的观察空间是一个连续的三维空间,表示摆杆自由端的x-y坐标和角速度,范围分别是[-1.0, 1.0],[-1.0, 1.0]和[-8.0, 8.0]
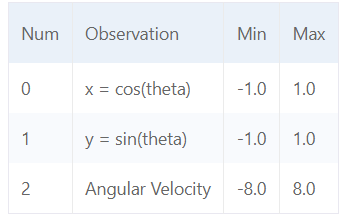
起始状态是一个在[-pi, pi]的随机角度和一个在[-1,1]的随机角速度。
- 软更新系数0.005;
高斯噪声标准差0.01 - 策略网络-价值网络(分别对应两个target网络)
- 激活函数最后一层使用的是tanh,调整数值到【-1,1】,然后乘以边界值即可。
- 在演员 (Actor) 网络中,需要输出连续动作;评论家 (Critic) 网络需要将状态和动作拼接起来作为其输入
来估计Q值,并用Q值来更新演员网络。 - target_update:2
- replay buffer可以放在DDPG对象里面,也可以单独拿出来
- take action函数,记得detach一下action的值
(6)代码
代码参考的一位博主的,忘了链接,侵删!!
import warnings
warnings.filterwarnings("ignore")
import argparse
import datetime
import time
import torch.optim as optim
import torch.nn.functional as F
import gym
from torch import nn
# 这里需要改成自己的RL_Utils.py文件的路径
from s08Nosie_Net.RL_Utils import *
# 将action范围重定在[0,1]之间
class NormalizedActions(gym.ActionWrapper):
def action(self, action):
low_bound = self.action_space.low
upper_bound = self.action_space.high
action = low_bound + (action + 1.0) * 0.5 * (upper_bound - low_bound)
action = np.clip(action, low_bound, upper_bound)
return action
def reverse_action(self, action):
low_bound = self.action_space.low
upper_bound = self.action_space.high
action = 2 * (action - low_bound) / (upper_bound - low_bound) - 1
action = np.clip(action, low_bound, upper_bound)
return action
# Ornstein–Uhlenbeck噪声
'''
在强化学习中,Ornstein–Uhlenbeck噪声通常被用作探索策略的一种方法,
因为它可以产生相关的噪声序列,从而使得动作选择更加平滑和连续23。
'''
class OUNoise(object):
def __init__(self, action_space, mu=0.0, theta=0.15, max_sigma=0.3, min_sigma=0.3, decay_period=100000):
self.mu = mu # OU噪声的参数
self.theta = theta # OU噪声的参数
self.sigma = max_sigma # OU噪声的参数
self.max_sigma = max_sigma
self.min_sigma = min_sigma
self.decay_period = decay_period
self.n_actions = action_space.shape[0]
self.low = action_space.low
self.high = action_space.high
self.reset()
def reset(self):
self.obs = np.ones(self.n_actions) * self.mu
def evolve_obs(self):
x = self.obs
dx = self.theta * (self.mu - x) + self.sigma * np.random.randn(self.n_actions)
self.obs = x + dx
return self.obs
def get_action(self, action, t=0):
ou_obs = self.evolve_obs()
self.sigma = self.max_sigma - (self.max_sigma - self.min_sigma) * min(1.0, t / self.decay_period) # sigma会逐渐衰减
return np.clip(action + ou_obs, self.low, self.high) # 动作加上噪声后进行剪切
# 经验回放对象
class ReplayBuffer:
def __init__(self, capacity):
self.capacity = capacity # 经验回放的容量
self.buffer = [] # 缓冲区
self.position = 0
def push(self, state, action, reward, next_state, done):
''' 缓冲区是一个队列,容量超出时去掉开始存入的转移(transition)
'''
if len(self.buffer) < self.capacity:
self.buffer.append(None)
self.buffer[self.position] = (state, action, reward, next_state, done)
self.position = (self.position + 1) % self.capacity
def sample(self, batch_size):
batch = random.sample(self.buffer, batch_size) # 随机采出小批量转移
state, action, reward, next_state, done = zip(*batch) # 解压成状态,动作等
return state, action, reward, next_state, done
def __len__(self):
''' 返回当前存储的量
'''
return len(self.buffer)
# 演员网络(给定状态,输出动作)
class Actor(nn.Module):
def __init__(self, n_states, n_actions, hidden_dim, init_w=3e-3):
super(Actor, self).__init__()
self.linear1 = nn.Linear(n_states, hidden_dim)
self.linear2 = nn.Linear(hidden_dim, hidden_dim)
self.linear3 = nn.Linear(hidden_dim, n_actions)
self.linear3.weight.data.uniform_(-init_w, init_w)
self.linear3.bias.data.uniform_(-init_w, init_w)
def forward(self, x):
x = F.relu(self.linear1(x))
x = F.relu(self.linear2(x))
x = torch.tanh(self.linear3(x))
return x
# 评论员网络(给定状态-动作对,做出评价)
class Critic(nn.Module):
def __init__(self, n_states, n_actions, hidden_dim, init_w=3e-3):
super(Critic, self).__init__()
self.linear1 = nn.Linear(n_states + n_actions, hidden_dim)
self.linear2 = nn.Linear(hidden_dim, hidden_dim)
self.linear3 = nn.Linear(hidden_dim, 1)
# 随机初始化为较小的值
self.linear3.weight.data.uniform_(-init_w, init_w)
self.linear3.bias.data.uniform_(-init_w, init_w)
def forward(self, state, action):
# 按维数1拼接
x = torch.cat([state, action], 1)
x = F.relu(self.linear1(x))
x = F.relu(self.linear2(x))
x = self.linear3(x)
return x
# 深度确定性策略梯度算法对象
class DDPG:
def __init__(self, n_states, n_actions, arg_dict):
self.device = torch.device(arg_dict['device'])
# DDPG要训练四个网络:Q网络,Q-target网络,策略网络,策略-target网络
self.critic = Critic(n_states, n_actions, arg_dict['hidden_dim']).to(self.device)
self.actor = Actor(n_states, n_actions, arg_dict['hidden_dim']).to(self.device)
self.target_critic = Critic(n_states, n_actions, arg_dict['hidden_dim']).to(self.device)
self.target_actor = Actor(n_states, n_actions, arg_dict['hidden_dim']).to(self.device)
# 复制参数到目标网络
for target_param, param in zip(self.target_critic.parameters(), self.critic.parameters()):
target_param.data.copy_(param.data)
for target_param, param in zip(self.target_actor.parameters(), self.actor.parameters()):
target_param.data.copy_(param.data)
self.critic_optimizer = optim.Adam(
self.critic.parameters(), lr=arg_dict['critic_lr'])
self.actor_optimizer = optim.Adam(self.actor.parameters(), lr=arg_dict['actor_lr'])
self.memory = ReplayBuffer(arg_dict['memory_capacity'])
self.batch_size = arg_dict['batch_size']
self.soft_tau = arg_dict['soft_tau'] # 软更新参数
self.gamma = arg_dict['gamma']
def choose_action(self, state):
state = torch.FloatTensor(state).unsqueeze(0).to(self.device)
action = self.actor(state)
return action.detach().cpu().numpy()[0, 0]
def update(self):
if len(self.memory) < self.batch_size: # 当 memory 中不满足一个批量时,不更新策略
return
# 从经验回放中(replay memory)中随机采样一个批量的转移(transition)
state, action, reward, next_state, done = self.memory.sample(self.batch_size)
# 转变为张量
state = torch.FloatTensor(np.array(state)).to(self.device)
next_state = torch.FloatTensor(np.array(next_state)).to(self.device)
action = torch.FloatTensor(np.array(action)).to(self.device)
reward = torch.FloatTensor(reward).unsqueeze(1).to(self.device)
done = torch.FloatTensor(np.float32(done)).unsqueeze(1).to(self.device)
policy_loss = self.critic(state, self.actor(state))
policy_loss = -policy_loss.mean()
next_action = self.target_actor(next_state)
target_value = self.target_critic(next_state, next_action.detach())
expected_value = reward + (1.0 - done) * self.gamma * target_value
expected_value = torch.clamp(expected_value, -np.inf, np.inf)
value = self.critic(state, action)
value_loss = nn.MSELoss()(value, expected_value.detach())
self.actor_optimizer.zero_grad()
policy_loss.backward()
self.actor_optimizer.step()
self.critic_optimizer.zero_grad()
value_loss.backward()
self.critic_optimizer.step()
# 软更新
for target_param, param in zip(self.target_critic.parameters(), self.critic.parameters()):
target_param.data.copy_(
target_param.data * (1.0 - self.soft_tau) +
param.data * self.soft_tau
)
for target_param, param in zip(self.target_actor.parameters(), self.actor.parameters()):
target_param.data.copy_(
target_param.data * (1.0 - self.soft_tau) +
param.data * self.soft_tau
)
def save_model(self, path):
Path(path).mkdir(parents=True, exist_ok=True)
torch.save(self.actor.state_dict(), path + 'checkpoint.pt')
def load_model(self, path):
self.actor.load_state_dict(torch.load(path + 'checkpoint.pt'))
# 训练函数
def train(arg_dict, env, agent):
# 开始计时
startTime = time.time()
print(f"环境名: {
arg_dict['env_name']}, 算法名: {
arg_dict['algo_name']}, Device: {
arg_dict['device']}")
print("开始训练智能体......")
ou_noise = OUNoise(env.action_space) # noise of action
rewards = [] # 记录所有回合的奖励
ma_rewards = [] # 记录所有回合的滑动平均奖励
for i_ep in range(arg_dict['train_eps']):
state = env.reset()
ou_noise.reset()
done = False
ep_reward = 0
i_step = 0
while not done:
if arg_dict['train_render']:
env.render()
i_step += 1
action = agent.choose_action(state)
action = ou_noise.get_action(action, i_step)
next_state, reward, done, _ = env.step(action)
ep_reward += reward
agent.memory.push(state, action, reward, next_state, done)
agent.update()
state = next_state
if (i_ep + 1) % 10 == 0:
print(f'Env:{
i_ep + 1}/{
arg_dict["train_eps"]}, Reward:{
ep_reward:.2f}')
rewards.append(ep_reward)
if ma_rewards:
ma_rewards.append(0.9 * ma_rewards[-1] + 0.1 * ep_reward)
else:
ma_rewards.append(ep_reward)
print('训练结束 , 用时: ' + str(time.time() - startTime) + " s")
# 关闭环境
env.close()
return {
'episodes': range(len(rewards)), 'rewards': rewards, 'ma_rewards': ma_rewards}
# 测试函数
def test(arg_dict, env, agent):
startTime = time.time()
print("开始测试智能体......")
print(f"环境名: {
arg_dict['env_name']}, 算法名: {
arg_dict['algo_name']}, Device: {
arg_dict['device']}")
rewards = [] # 记录所有回合的奖励
ma_rewards = [] # 记录所有回合的滑动平均奖励
for i_ep in range(arg_dict['test_eps']):
state = env.reset()
done = False
ep_reward = 0
i_step = 0
while not done:
if arg_dict['test_render']:
env.render()
i_step += 1
action = agent.choose_action(state)
next_state, reward, done, _ = env.step(action)
ep_reward += reward
state = next_state
rewards.append(ep_reward)
if ma_rewards:
ma_rewards.append(0.9 * ma_rewards[-1] + 0.1 * ep_reward)
else:
ma_rewards.append(ep_reward)
print(f"Epside:{
i_ep + 1}/{
arg_dict['test_eps']}, Reward:{
ep_reward:.1f}")
print("测试结束 , 用时: " + str(time.time() - startTime) + " s")
env.close()
return {
'episodes': range(len(rewards)), 'rewards': rewards}
# 创建环境和智能体
def create_env_agent(arg_dict):
env = NormalizedActions(gym.make(arg_dict['env_name'])) # 装饰action噪声
env.seed(arg_dict['seed']) # 随机种子
n_states = env.observation_space.shape[0]
n_actions = env.action_space.shape[0]
agent = DDPG(n_states, n_actions, arg_dict)
return env, agent
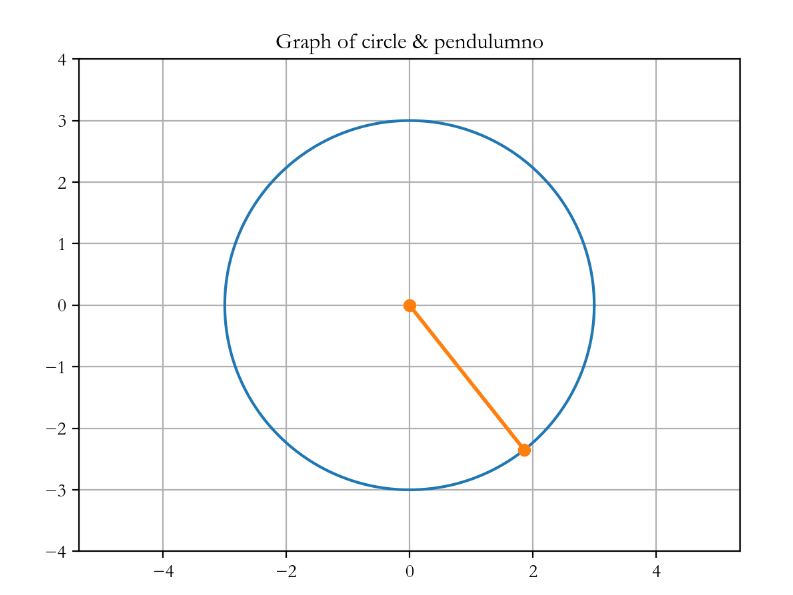
'''
动作:往左转还是往右转,用力矩来衡量,即力乘以力臂。范围[-2,2]
状态:cos(theta), sin(theta) , thetadot(角速度)
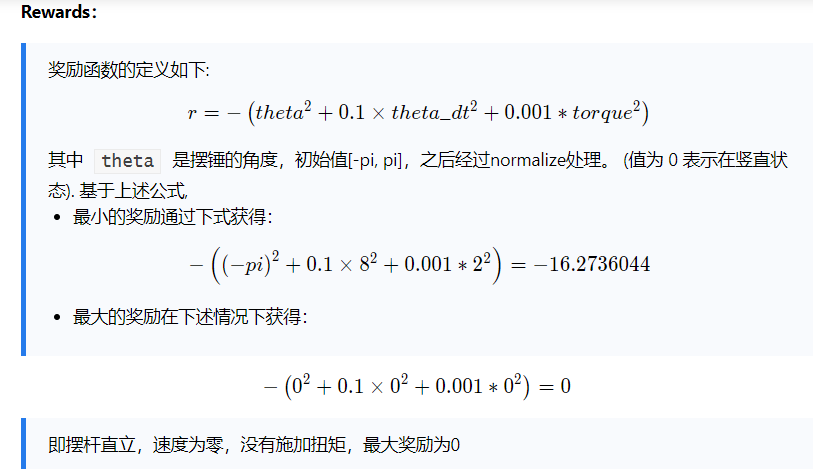
奖励:总的来说,越直立拿到的奖励越高,越偏离,奖励越低。
游戏结束:200步后游戏结束。所以要在200步内拿到的分越高越好
'''
if __name__ == '__main__':
# 防止报错 OMP: Error #15: Initializing libiomp5md.dll, but found libiomp5md.dll already initialized.
os.environ["KMP_DUPLICATE_LIB_OK"] = "TRUE"
# 获取当前路径
curr_path = os.path.dirname(os.path.abspath(__file__))
# 获取当前时间
curr_time = datetime.datetime.now().strftime("%Y_%m_%d-%H_%M_%S")
# 相关参数设置
parser = argparse.ArgumentParser(description="hyper parameters")
parser.add_argument('--algo_name', default='DDPG', type=str, help="name of algorithm")
parser.add_argument('--env_name', default='Pendulum-v1', type=str, help="name of environment")
parser.add_argument('--train_eps', default=300, type=int, help="episodes of training")
parser.add_argument('--test_eps', default=20, type=int, help="episodes of testing")
parser.add_argument('--gamma', default=0.99, type=float, help="discounted factor")
parser.add_argument('--critic_lr', default=1e-3, type=float, help="learning rate of critic")
parser.add_argument('--actor_lr', default=1e-4, type=float, help="learning rate of actor")
parser.add_argument('--memory_capacity', default=8000, type=int, help="memory capacity")
parser.add_argument('--batch_size', default=128, type=int)
parser.add_argument('--target_update', default=2, type=int)
parser.add_argument('--soft_tau', default=1e-2, type=float)
parser.add_argument('--hidden_dim', default=256, type=int)
parser.add_argument('--device', default='cuda', type=str, help="cpu or cuda")
parser.add_argument('--seed', default=520, type=int, help="seed")
parser.add_argument('--show_fig', default=False, type=bool, help="if show figure or not")
parser.add_argument('--save_fig', default=True, type=bool, help="if save figure or not")
parser.add_argument('--train_render', default=False, type=bool,
help="Whether to render the environment during training")
parser.add_argument('--test_render', default=True, type=bool,
help="Whether to render the environment during testing")
args = parser.parse_args()
default_args = {
'result_path': f"{
curr_path}/outputs/{
args.env_name}/{
curr_time}/results/",
'model_path': f"{
curr_path}/outputs/{
args.env_name}/{
curr_time}/models/",
}
# 将参数转化为字典 type(dict)
arg_dict = {
**vars(args), **default_args}
print("算法参数字典:", arg_dict)
# 创建环境和智能体
env, agent = create_env_agent(arg_dict)
# 传入算法参数、环境、智能体,然后开始训练
res_dic = train(arg_dict, env, agent)
print("算法返回结果字典:", res_dic)
# 保存相关信息
agent.save_model(path=arg_dict['model_path'])
save_args(arg_dict, path=arg_dict['result_path'])
save_results(res_dic, tag='train', path=arg_dict['result_path'])
plot_rewards(res_dic['rewards'], arg_dict, path=arg_dict['result_path'], tag="train")
# =================================================================================================
# 创建新环境和智能体用来测试
print("=" * 300)
env, agent = create_env_agent(arg_dict)
# 加载已保存的智能体
agent.load_model(path=arg_dict['model_path'])
res_dic = test(arg_dict, env, agent)
save_results(res_dic, tag='test', path=arg_dict['result_path'])
plot_rewards(res_dic['rewards'], arg_dict, path=arg_dict['result_path'], tag="test")
(8)OUNoise(Ornstein-Uhlenbeck Noise)
在强化学习中,OUNoise(Ornstein-Uhlenbeck Noise)是一种常用的随机噪声模型,通常用于探索性策略(Exploration Strategy)。它模拟了一个连续时间和自相关性的高斯过程,可以为智能体的动作添加随机性,以促进探索和学习。
OUNoise 的特点是具有自回归性质,即当前噪声值受到过去噪声值的影响。这使得 OUNoise 生成的噪声在一定程度上具有平滑性,避免了剧烈的随机变动。这对于强化学习任务中的连续动作空间非常有用,可以帮助智能体探索更广泛的动作空间。
在强化学习中,OUNoise 常用于确定动作噪声的大小和方向。通过为智能体的动作添加 OUNoise,可以使智能体在训练过程中保持一定的探索性,以便发现更优的策略。随着训练的进行,噪声的强度通常会逐渐减小,使智能体逐渐收敛到最佳策略。
OUNoise 的参数包括:
-
mu:OU噪声的均值,通常设置为0。
-
theta:OU噪声的自相关时间常数,控制了噪声的平滑性和自回归特性。
-
sigma:OU噪声的标准差,控制了噪声的强度。
-
max_sigma 和 min_sigma:用于在训练过程中逐渐减小噪声强度的上下限。
-
decay_period:噪声强度衰减的时间周期。
通过在训练过程中应用 OUNoise,智能体可以更好地探索环境,增加对未知情况的适应能力,并提高学习的稳定性和收敛速度。在测试阶段,可以选择禁用 OUNoise 或减小噪声的强度,以获得更稳定和确定性的动作输出。
(9)DDPG解决离散动作问题
DDPG(Deep Deterministic Policy Gradient)是一种强化学习算法,通常用于解决连续动作空间的问题。然而,DDPG本身是基于确定性策略的算法,不直接适用于离散动作空间。但是,可以通过一些技巧将DDPG算法扩展到离散动作问题上。
下面是一种常见的方法,称为混合策略(Hybrid Policy):
-
离散动作空间的表示:将离散动作空间离散化为一组有限的离散动作。可以通过将连续动作空间分成离散的区域,或者使用动作索引来表示离散动作。
-
值函数网络:使用一个值函数网络(Q-network)来估计离散动作状态对的值函数。这个网络接受状态作为输入,并输出每个离散动作的值。
-
策略网络:使用一个策略网络(Actor-network)来学习选择离散动作的策略。策略网络接受状态作为输入,并输出每个离散动作的概率分布。
-
混合策略更新:在训练过程中,使用DDPG的经验回放和梯度更新方法来更新值函数网络和策略网络。值函数网络用于估计动作值,策略网络用于选择动作。
有篇论文(Cooperative Caching and Beamforming for CoMP-Enabled Mobile Edge Networks)示例:
- 本文为了将DDPG算法应用于离散动作空间,采用了一种混合编码的方法,即将离散动作转化为连续动作。具体地,本文将每个内容的缓存决策编码为一个0-1向量,其中1表示缓存该内容,0表示不缓存该内容。然后,本文将这个0-1向量转化为一个实数向量,其中每个元素的值介于0和1之间,表示缓存该内容的概率。这样,本文就可以用DDPG算法输出一个实数向量作为内容缓存决策。其中策略网络的输出层是一个全连接层,激活函数是sigmoid函数,可以输出介于0和1之间的实数值。在执行决策时,本文再将这个实数向量转化为一个0-1向量,根据每个元素的值与一个随机数的大小关系,确定是否缓存该内容。
- 也就是说,输出结果小于0.5就取值为0,大于0.5就取值为1。
还有篇论文(Collaborative Edge Caching and Transcoding for 360◦ Video Streaming Based on Deep Reinforcement Learning):