官方解释:
pcnormals - Estimate normals for point cloud
This MATLAB function returns a matrix that stores a normal for each
point in the input ptCloud.
normals = pcnormals(ptCloud)
normals = pcnormals(ptCloud,k)
输入参数
ptCloud - Object for storing point cloud
pointCloud object
k - Number of points used for local plane fitting
integer greater than or equal to 3
输出参数
normals - Normals used to fit a local plane
M-by-3 | M-by-N-by-3
翻译:
估计点云的法线
这个MATLAB函数返回一个矩阵,该矩阵存储输入ptCloud中每个点的法线。
normal = pcnormals(ptCloud)
normals = pcnormals(ptCloud,k)
输入参数
ptCloud -存储点云的对象
pointCloud对象
k -用于局部平面拟合的点数
大于或等于3的整数
输出参数
法线-用于拟合局部平面的法线
m × 3 | m × n × 3
k是最邻近点的数量,默认是8。
clear
% 加载茶壶的点云
ptCloud = pcread('teapot.ply');
% 计算法向量,6个邻近点
normals = pcnormals(ptCloud);
% 读取x
x = ptCloud.Location(1:5:end,1);
% 读取y
y = ptCloud.Location(1:5:end,2);
% 读取z
z = ptCloud.Location(1:5:end,3);
% uvw为法向量的三列
u = normals(1:5:end,1);
v = normals(1:5:end,2);
w = normals(1:5:end,3);
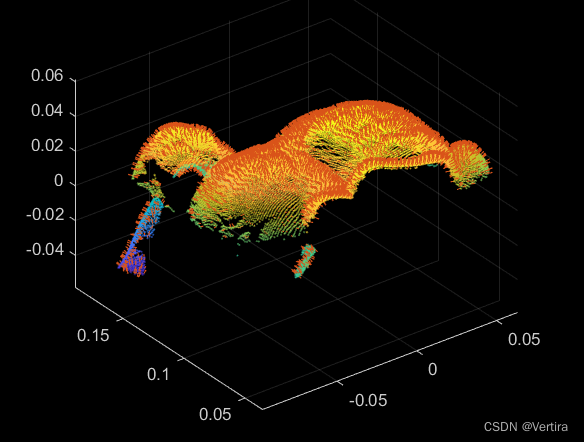
pcshow(ptCloud)
hold on
% 显示法向量
quiver3(x,y,z,u,v,w);
hold off
曲率计算-并计算法向量 直接采用了协方差矩阵进行计算
clear
% 读取茶壶点云
ptCloud = pcread('teapot.ply');
% 读取xyz
a = ptCloud.Location;
%vec储存法向量
vec = zeros(size(a));
%q储存曲率
q = zeros(length(a),1);
k = 8;
% 搜索每个点的最邻近点
neighbors = knnsearch(a(:,1:3),a(:,1:3), 'k', k+1);
for i = 1:length(a)
curtemp = neighbors(i,2:end);
indpoint = a(curtemp,:);
% 计算协方差并提取特征
[v, c] = eig(cov(indpoint));
%特征值按照升序排列1<2<3
c = diag(c)';
%计算特征值的总和
z = sum(c);
%计算曲率,用最小特征值除/特征值总和,这也是特征归一化
p1 = c(:,1)/z;
q(i,:) = abs(p1);
%最小特征值对应的列向量就是法向量,dot是交叉相乘
vec(i,:) = v(:,1)';
end
% 读取x
x = ptCloud.Location(1:5:end,1);
% 读取y
y = ptCloud.Location(1:5:end,2);
% 读取z
z = ptCloud.Location(1:5:end,3);
% uvw为法向量的三列
u = vec(1:5:end,1);
v = vec(1:5:end,2);
w = vec(1:5:end,3);
pcshow(ptCloud)
hold on
% 显示法向量
quiver3(x,y,z,u,v,w);
hold off