矩阵乘计算GPU实现中通常为线程块计算一个较大的[m_tile, k] *[k, n_tile]的矩阵乘,最后分配到每个线程后同样为每个线程计算更小的一个[m_tile, k] *[k, n_tile]。
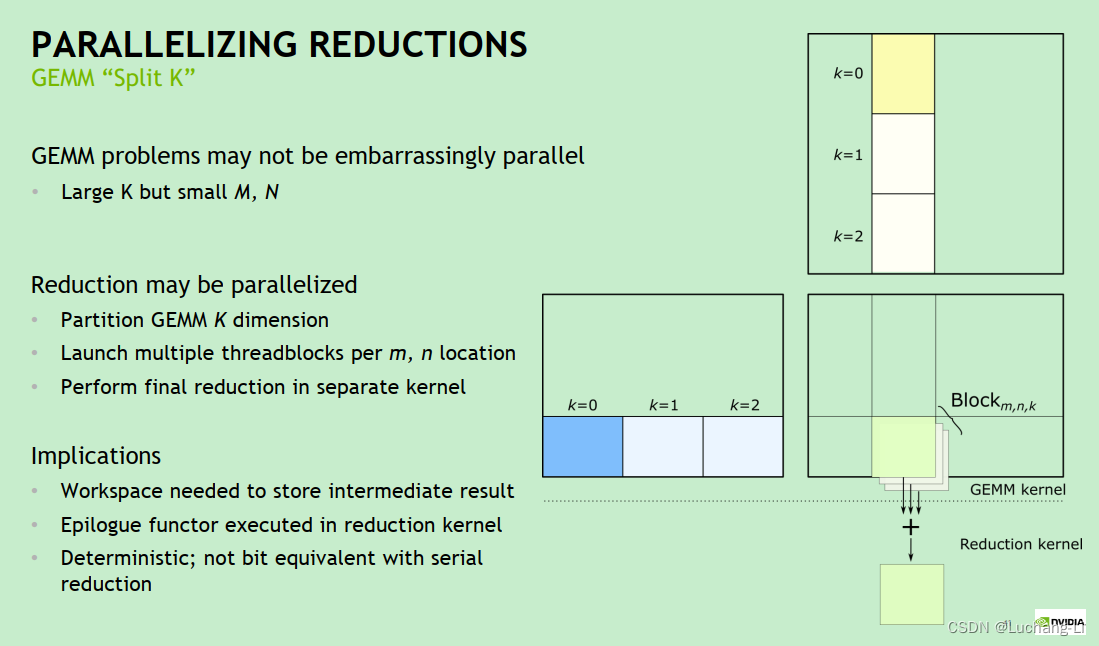
这样存在的一个问题主要是在于m和n较小而k很大时,如下图所示的矩阵乘案例,只能分配很少的线程和线程块,并且每个线程内部的循环次数很大,GPU无法被充分利用,导致矩阵乘实现的性能比较差。这种情况可能广泛出现在卷积通过im2col/im2row方法转换得到的矩阵乘:OpenPPL 中的卷积优化技巧 - 知乎

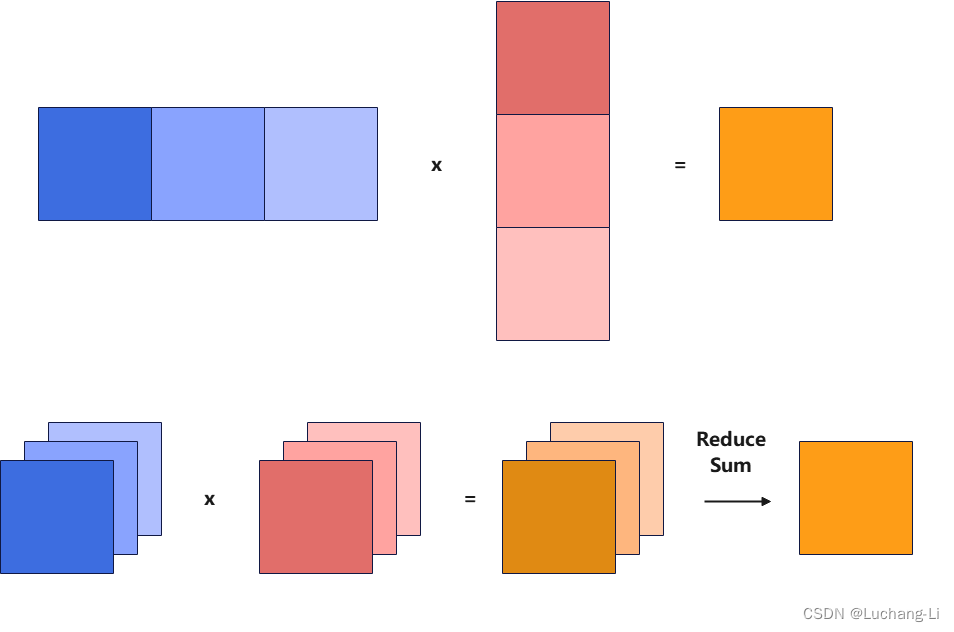
splitk的原理则是把矩阵乘的k方向split成多个k_n更小的k_size,从而得到了k_n个[m, k_tile] x [k_tile, n]矩阵乘,每个矩阵乘的k loop大小缩短,从而每个线程的计算时间缩短,并且可以创建更多的线程数量来执行计算。
基本原理如下图所示,也就是并行计算多个k更小的矩阵乘,并且增加一个额外的ReduceSum算子进行累加计算。
有没有一个简单的方法来实现上述优化呢?
答案是可以通过一个非常简单通用的图优化,而不需要新增和修改推理引擎现有的算子实现,但是可能性能比专门实现的splitk矩阵乘略差点。
假定矩阵乘input a的shape为[Ba, M, K]。 Ba为input a的batch,可以为任一多个维度。现在首先进行一个reshape得到[Ba, M, Kn, K0],然后进行一个transpose得到[Ba, Kn, M, K0],即可得到splitk后矩阵乘新的input a。
同样矩阵乘input b的shape为[Bb, K, N]。Bb为input b的batch,可以为任一多个维度。现在进行reshape得到[Bb, Kn, K0, N],即为splitk后矩阵乘新的input b。
那么[Ba, Kn, M, K0]与[Bb, Kn, K0, N]的batch矩阵乘就达到了split k的效果。最后在矩阵乘算子后面插入一个ReduceSum(axis=-3),即可完成。
这个图优化插入了两个reshape,一个transpose,一个reduce。reduce不可避免,reshape算子实际上只是内存重解释,不需要真正计算耗时。因此相比专门的splitk矩阵乘多了一个transpose耗时,当然通常这个算子耗时远远低于矩阵乘的耗时。
需要注意的一点是矩阵乘的bias,上面把splitk转换为batch矩阵乘的时候,如果有bias,那么会导致每个k split的batch都加上了一份bias,而本来应该只加一份bias。一种解决方法是把bias拆分为一个add算子添加到reduceSum后面,这个add可以与matmul后面的其他elemwise融合从而降低性能损失。
在NV GPU这个方法性能收益可能没有端侧GPU那么高,因为端侧GPU很难使用shared mem加速,本文的方法反而可能是一种不错的方法。
numpy参考代码
import numpy as np
shape_a = [1, 49, 2016]
shape_b = [2016, 448]
np.random.seed(1)
data_a = np.random.uniform(-1, 1, size=shape_a).astype("float32")
data_b = np.random.uniform(-1, 1, size=shape_b).astype("float32")
matmul_0 = np.matmul(data_a, data_b)
orig_k = 2016
k_num = 8
k_tile = orig_k // k_num
data_a1 = data_a.reshape([1, 49, k_num, k_tile])
data_a2 = np.transpose(data_a1, [0, 2, 1, 3])
data_b1 = data_b.reshape([k_num, k_tile, 448])
matmul_1 = np.matmul(data_a2, data_b1)
matmul_2 = np.sum(matmul_1, axis=-3)
error = matmul_0 - matmul_2