一、视频接入
参数说明:视频输入接口
支持 8-Lane image sensor 串行输入,支持 MIPI/LVDS/Sub-LVDS/HiSPi 多种接口
支持 2x4-Lane 或 4x2-Lane 等多种组合,最高支持 4 路 sensor 串行输入
最大分辨率 8192 x 8192
支持 8/10/12/14 Bit RGB Bayer DC 时序视频输入,时钟频率最高 150MHz
支持 BT.601、BT.656、BT.1120 视频输入接口
支持主流 CMOS 电平热成像传感器
数字摄像头(DC)接口时序
-
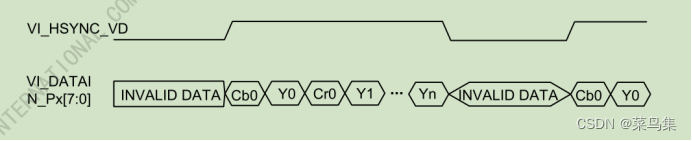
水平时序
VICAP 接数字摄像头时,VI_HSYNC_VD 表示数据有效信号,数据有效信号极性可
配,水平时序所示。
-
垂直时序
VICAP 支持两种垂直时序脉冲方式和行有效方式,如下图所示。垂直同步极性可配数字摄像头垂直时序脉冲方式
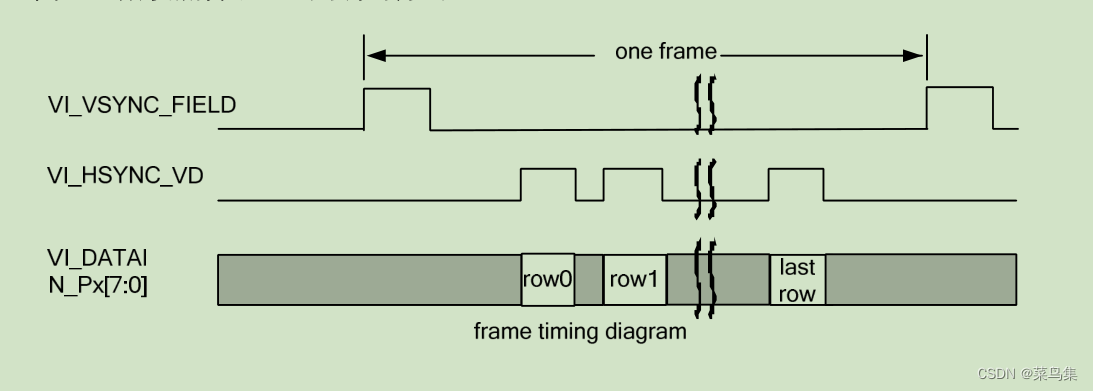
数字摄像头垂直时序行有效方式
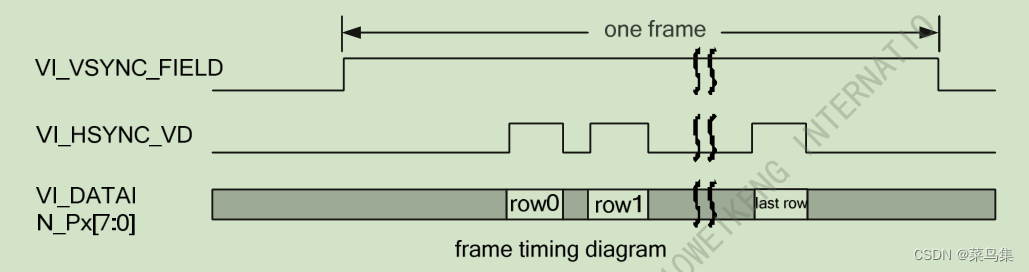
对于 VICAP 内部处理来说,这两种时序相同,VICAP 内部检测到一个上升沿或下降
沿,这认为是一帧的开始,然后检测数据有效信号,来判断当前数据是否有效。
二、复用寄存器
- 管脚复用
- 查看手册mipi dev/vi dev/vi chn/vi pipe/所支持的编号;
- mipi配置,设置接入模式为cmos;(dc接口不需要lain id)
- 设置vi离线还是在线模式;
- 设置vi属性,使能vi设备;
- vi绑定pipe;
- 设置pipe属性,创建并开始pipe;
- 设置通道属性,使能通道;
详细说明
- 参考SS928V100 VI 输入场景详细说明.xlsx 中DC接入需要复用的寄存器
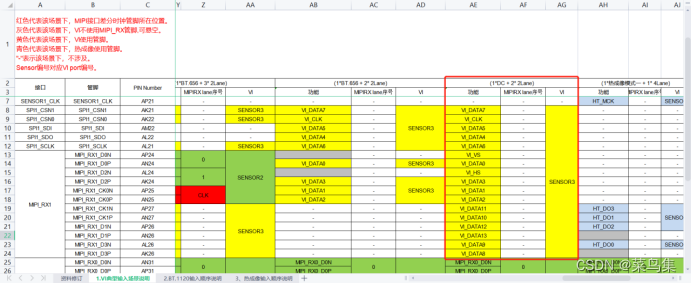
- 复用寄器
static void vi_DC_mode_mux(void)
{
void *iocfg2_base = sys_config_get_reg_iocfg2();
sys_writel(iocfg2_base + 0x0158, 0x0206); /* VI_CLK */
sys_writel(iocfg2_base + 0x0168, 0x0005); /* VI_VS */
sys_writel(iocfg2_base + 0x0170, 0x0005); /* VI_HS */
sys_writel(iocfg2_base + 0x016C, 0x0006); /* VI_DATA0 */
sys_writel(iocfg2_base + 0x0178, 0x0006); /* VI_DATA1 */
sys_writel(iocfg2_base + 0x017C, 0x0006); /* VI_DATA2 */
sys_writel(iocfg2_base + 0x0174, 0x0006); /* VI_DATA3 */
sys_writel(iocfg2_base + 0x0160, 0x0206); /* VI_DATA4 */
sys_writel(iocfg2_base + 0x015C, 0x0206); /* VI_DATA5 */
sys_writel(iocfg2_base + 0x0164, 0x0206); /* VI_DATA6 */
sys_writel(iocfg2_base + 0x0154, 0x0206); /* VI_DATA7 */
sys_writel(iocfg2_base + 0x0194, 0x0006); /* VI_DATA8 */
sys_writel(iocfg2_base + 0x0190, 0x0006); /* VI_DATA9 */
sys_writel(iocfg2_base + 0x0184, 0x0006); /* VI_DATA10 */
sys_writel(iocfg2_base + 0x0180, 0x0006); /* VI_DATA11 */
sys_writel(iocfg2_base + 0x0188, 0x0006); /* VI_DATA12 */
sys_writel(iocfg2_base + 0x018C, 0x0006); /* VI_DATA13 */
}
- 选择类型
static void vi_pin_mux(int vi_intf_type)
{
switch (vi_intf_type) {
case VI_MIPI_RX_MODE:
mipi_rx_pin_mux(MIPI_RX_0);
mipi_rx_pin_mux(MIPI_RX_1);
break;
case VI_CMOS_BT1120_MODE:
mipi_rx_pin_mux(MIPI_RX_0);
vi_bt1120_mode_mux();
break;
case VI_THERMO_MODE:
mipi_rx_pin_mux(MIPI_RX_0);
thermo_sensor_pin_mux();
break;
case VI_THERMO_T3_MODE:
mipi_rx_pin_mux(MIPI_RX_0);
thermo_t3_pin_mux();
break;
case VI_MODE_1_DC:
mipi_rx_pin_mux(MIPI_RX_0);
vi_DVP_mode_mux();
sys_config_print("========== DVP ==========\n");
break;
default:
break;
}
}
- 选择COMS
static int is_coms(const char *name, unsigned int name_len)
{
unsigned int len;
if (name_len == 0) {
sys_config_print("name len is 0!\n");
return 0;
}
len = SENSOR_NAME_LEN;
if ((strncmp("bt1120", name, len) == 0) || (strncmp("bt656", name, len) == 0) ||
(strncmp("bt601", name, len) == 0) || (strncmp("DC", name, len) == 0))
{
return 1;
} else {
return 0;
}
}
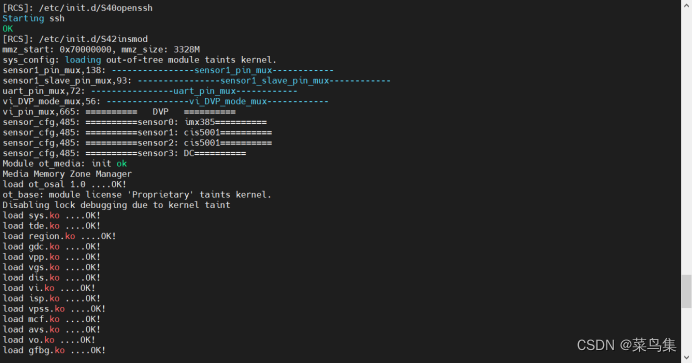
三、加载驱动
四、修改mpp代码
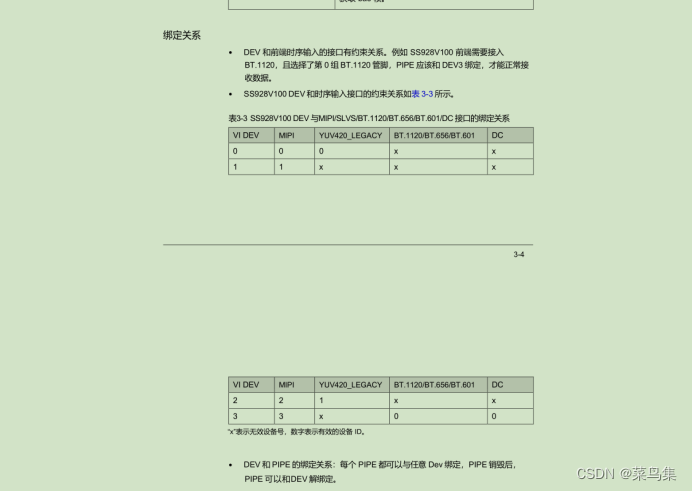
根据 MPP 媒体处理软件 V5.0 开发参考.pdf中所说的绑定关系确定DC的videv、MIPI选择3
- comm_vi配置
static ot_vi_dev_attr g_DC_dev_attr = {
.intf_mode = OT_VI_INTF_MODE_DC,
/* Invalid argument */
.work_mode = OT_VI_WORK_MODE_MULTIPLEX_1, // 1 路复合工作模式
/* mask component */
.component_mask = {
0xFF0000, 0x0},
.scan_mode = OT_VI_SCAN_PROGRESSIVE, // VI 输入为逐行图像 OT_VI_SCAN_INTERLACED // VI 输入为隔行图像
/* Invalid argument */
.ad_chn_id = {
-1, -1, -1, -1},
/* data seq */
.data_seq = OT_VI_DATA_SEQ_UYVY,
/* sync param */
.sync_cfg = {
.vsync = OT_VI_VSYNC_PULSE, // 垂直同步脉冲模式,即一个脉冲到来表示新的一帧或一场
// .vsync = OT_VI_VSYNC_FIELD, // DC 模式下表示行有效信号
.vsync_neg = OT_VI_VSYNC_NEG_HIGH, // OT_VI_VSYNC_FIELD 表示偶数场的 vsync 信号为高电平 // OT_VI_VSYNC_PULSE 表示vsync 同步脉冲为正脉冲
.hsync = OT_VI_HSYNC_VALID_SIG, // 水平同步数据有效信号 // OT_VI_HSYNC_PULSE
.hsync_neg = OT_VI_HSYNC_NEG_HIGH, // OT_VI_HSYNC_VALID_SIG 表示高电平表示有效数据
.vsync_valid = OT_VI_VSYNC_VALID_SIG, // 表示垂直同步时序行有效信号 // OT_VI_VSYNC_NORM_PULSE 表示垂直有效同步标识
.vsync_valid_neg = OT_VI_VSYNC_NORM_PULSE, // OT_VI_VSYNC_VALID_SIG 表示高电平为有效信号
.timing_blank = {
//水平前消隐区宽度 水平有效宽度 水平后消隐区宽度
/* hsync_hfb hsync_act hsync_hhb */
0, 0, 0,
//帧图像或隔行输入 帧图像或隔行 帧图像或隔行输入时
//时奇场图像的垂直 输入时奇场垂 奇场垂直后消隐区高
//前消隐区高度 直有效高度 度
/* vsync0_vhb vsync0_act vsync0_hhb */
0, 0, 0,
//隔行输入时偶场垂 隔行输入时偶 隔行输入时偶场垂
//直前消隐区高度 场垂直有效高度 直后消隐区高度
/* vsync1_vhb vsync1_act vsync1_hhb */
0, 0, 0
}
},
/* data type */
.data_type = OT_VI_DATA_TYPE_RAW, //OT_VI_DATA_TYPE_YUV, //OT_VI_DATA_TYPE_RAW
/* data reverse */
.data_reverse = TD_FALSE,
/* input size */
.in_size = {
640, 512},
/* data rate */
.data_rate = OT_DATA_RATE_X1,
};
static combo_dev_attr_t g_mipi_DC_attr =
{
.devno = 0,
.input_mode = INPUT_MODE_MIPI, // /* input mode */
.data_rate = MIPI_DATA_RATE_X1,
.img_rect = {
0, 0, 640, 512},
.mipi_attr =
{
DATA_TYPE_RAW_12BIT,
OT_MIPI_WDR_MODE_NONE,
{
0, 1, 2, 3, 4, 5, 6, 7}
}
};
- sample_vi_cfg配置
根据输入格式选择不同的类型
例如:
vi_cfg[i].pipe_info[j].pipe_attr.pixel_format = OT_PIXEL_FORMAT_YUV_400;
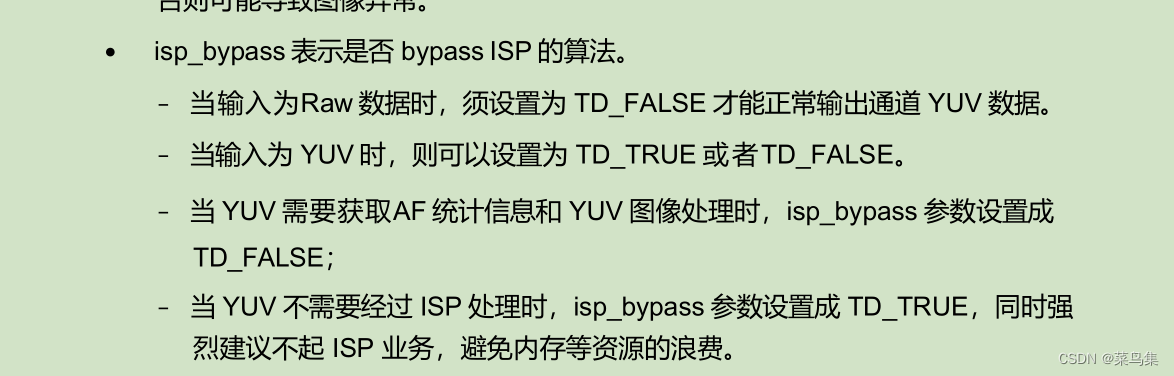
vi_cfg[i].pipe_info[j].isp_need_run = TD_FALSE;
vi_cfg[i].pipe_info[j].pipe_attr.isp_bypass = TD_TRUE; // yuv true
vi_cfg[i].pipe_info[j].chn_info[0].chn_attr.pixel_format = OT_PIXEL_FORMAT_YUV_400;
配置完vpss和venc就可以输出视频了
五、输出红外视频