前导
更多文章代码详情可查看博主个人网站:https://www.iwtmbtly.com/
导入需要使用的库和文件:
>>> import torch
>>> import numpy as np
一、什么是Tensor
在深度学习中,从数据的组织,到模型内部的参数,都是通过一种叫做张量(Tensor)的数据结构进行表示和处理。
Tensor 是深度学习框架中极为基础的概念,也是 PyTroch、TensorFlow 中最重要的知识 点之一,它是一种数据的存储和处理结构。
回忆一下我们目前知道的几种数据表示:
- 标量,也称 Scalar,是一个只有大小,没有方向的量,比如 1.8、e、10 等。
- 向量,也称 Vector,是一个有大小也有方向的量,比如 (1,2,3,4) 等。
- 矩阵,也称 Matrix,是多个向量合并在一起得到的量,比如[(1,2,3),(4,5,6)]等。
为了帮助你更好理解标量、向量和矩阵,我特意准备了一张示意图,可以结合图片理解。
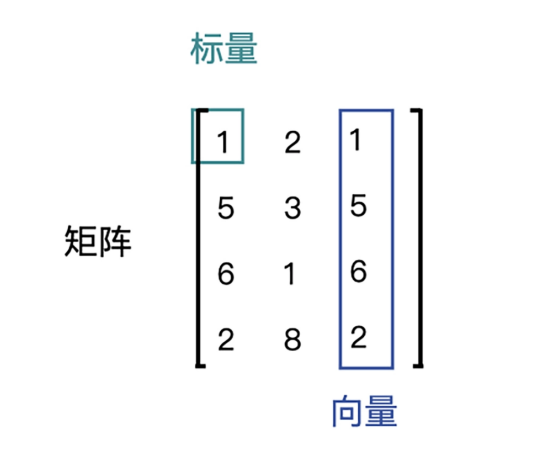
不难发现,几种数据表示其实都是有着联系的,标量可以组合成向量,向量可以组合成矩 阵。那么,我们可否将它们看作是一种数据形式呢?
答案是可以的,这种统一的数据形式,在 PyTorch 中我们称之为张量 (Tensor)。从标 量、向量和矩阵的关系来看,你可能会觉得它们就是不同“维度”的 Tensor,这个说法 对,也不全对。
说它不全对是因为在 Tensor 的概念中,我们更愿意使用 Rank(秩)来表示这种“维 度”,比如标量,就是 Rank 为 0 阶的 Tensor;向量就是 Rank 为 1 阶的 Tensor;矩阵 就是 Rank 为 2 阶的 Tensor。也有 Rank 大于 2 的 Tensor。当然啦,你如果说维度其实 也没什么错误,平时很多人也都这么叫。
说完 Tensor 的含义,我们一起看一下 Tensor 的类型,以及如何创建 Tensor。
二、Tensor 的类型、创建及转换
在不同的深度学习框架下,Tensor 呈现的特点大同小异,我们使用它的方法也差不多。这 节课我们就以 PyTorch 中的使用方法为例进行学习。
Tensor 的类型
在 PyTorch 中,Tensor 支持的数据类型有很多种,这里列举较为常用的几种格式:
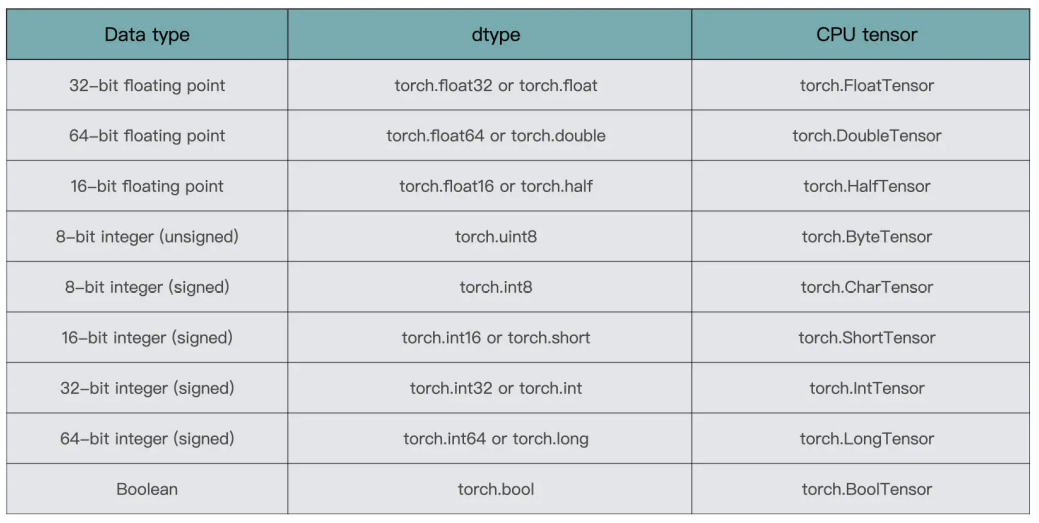
一般来说,torch.float32、torch.float64、torch.uint8 和 torch.int64 用得相对较多一 些,但是也不是绝对,还是要根据实际情况进行选择。
Tensor 的创建
PyTorch 对于 Tensor 的操作已经非常友好了,你可以通过多种不同的方式创建一个任意 形状的 Tensor,而且每种方式都很简便,我们一起来看一下。
直接创建
首先来看直接创建的方法,这也是最简单创建的方法。我们需要用到下面的 torch.tensor 函数直接创建。
torch.tensor(data, dtype=None, device=None,requires_grad=False)
例如:
>>> A = torch.tensor([x for x in range(6)])
>>> A
tensor([0, 1, 2, 3, 4, 5])
结合代码,我们看看其中的参数是什么含义。
我们从左往右依次来看,首先是 data,也就是我们要传入模型的数据。PyTorch 支持通过 list、 tuple、numpy array、scalar 等多种类型进行数据传入,并转换为 tensor。
接着是 dtype,它声明了你需要返回一个怎样类型的 Tensor,具体类型可以参考前面表格 里列举的 Tensor 的那些类型。
然后是 device,这个参数指定了数据要返回到的设备,目前暂时不需要关注,缺省即可。
最后一个参数是 requires_grad,用于说明当前量是否需要在计算中保留对应的梯度信 息。在 PyTorch 中,只有当一个 Tensor 设置 requires_grad 为 True 的情况下,才会对 这个 Tensor 以及由这个 Tensor 计算出来的其他 Tensor 进行求导,然后将导数值存在 Tensor 的 grad 属性中,便于优化器来更新参数。
所以,你需要注意的是,把 requires_grad 设置成 true 或者 false 要灵活处理。如果是训 练过程就要设置为 true,目的是方便求导、更新参数。而到了验证或者测试过程,我们的 目的是检查当前模型的泛化能力,那就要把 requires_grad 设置成 Fasle,避免这个参数 根据 loss 自动更新。
从 NumPy 中创建
在实际应用中,我们在处理数据的阶段很多时候使用的是 NumPy,而数据处理好之后想要传入 PyTorch 的深度学习模型中,则 需要借助 Tensor,所以 PyTorch 提供了一个从 NumPy 转到 Tensor 的语句:
torch.from_numpy(ndarry)
例如:
>>> A = torch.from_numpy(np.array([x for x in range(6)]))
>>> A
tensor([0, 1, 2, 3, 4, 5])
有时候我们在开发模型的过程中,需要用到一些特定形式的矩阵 Tensor,比如全是 0 的, 或者全是 1 的。这时我们就可以用这个方法创建,比如说,先生成一个全是 0 的 NumPy数组,然后转换成 Tensor。但是这样也挺麻烦的,因为这意味着你要引入更多的包 (NumPy),也会使用更多的代码,这会增加出错的可能性。
不过你别担心,PyTorch 内部已经提供了更为简便的方法,我们接着往下看。
创建特殊形式的 Tensor
我们一块来看一下后面的几个常用函数,它们都是在 PyTorch 模型内部使用的。
创建零矩阵 Tensor:零矩阵顾名思义,就是所有的元素都为 0 的矩阵。
torch.zeros(size, dtype=None...)
例如:
>>> A = torch.zeros((3,4), dtype=float)
>>> A
tensor([[0., 0., 0., 0.],
[0., 0., 0., 0.],
[0., 0., 0., 0.]], dtype=torch.float64)
其中,我们用得比较多的就是 size 参数和 dtype 参数。size 定义输出张量形状的整数序 列。
这里你可能注意到了,在函数参数列表中我加入了省略号,这意味着 torch.zeros 的参数 有很多。不过,现在是介绍零矩阵的概念,形状相对来说更重要。其他的参数(比如 前面提到的 requires_grad 参数)与此无关,现阶段我们暂时不关注。
创建单位矩阵 Tensor:单位矩阵是指主对角线上的元素都为 1 的矩阵。
torch.eye(size, dtype=None...)
例如:
>>> A = torch.eye(6)
>>> A
tensor([[1., 0., 0., 0., 0., 0.],
[0., 1., 0., 0., 0., 0.],
[0., 0., 1., 0., 0., 0.],
[0., 0., 0., 1., 0., 0.],
[0., 0., 0., 0., 1., 0.],
[0., 0., 0., 0., 0., 1.]])
创建全一矩阵 Tensor:全一矩阵顾名思义,就是所有的元素都为 1 的矩阵。
torch.ones(size, dtype=None...)
例如:
>>> A = torch.ones((6,6))
>>> A
tensor([[1., 1., 1., 1., 1., 1.],
[1., 1., 1., 1., 1., 1.],
[1., 1., 1., 1., 1., 1.],
[1., 1., 1., 1., 1., 1.],
[1., 1., 1., 1., 1., 1.],
[1., 1., 1., 1., 1., 1.]])
创建随机矩阵 Tensor:在 PyTorch 中有几种较为经常使用的随机矩阵创建方式,分别 如下。
torch.rand(size)
torch.randn(size)
torch.normal(size, mean, std)
torch.randint(low, high, size)
这些方式各自有不同的用法,你可以根据自己的需要灵活使用。
-
torch.rand 用于生成数据类型为浮点型且维度指定的随机 Tensor,随机生成的浮点数 据在 0~1 区间均匀分布。
-
torch.randn 用于生成数据类型为浮点型且维度指定的随机 Tensor,随机生成的浮点数 的取值满足均值为 0、方差为 1 的标准正态分布。
-
torch.normal 用于生成数据类型为浮点型且维度指定的随机 Tensor,可以指定均值和 标准差。
-
torch.randint 用于生成随机整数的 Tensor,其内部填充的是在[low,high) 均匀生成的 随机整数。
Tensor 的转换
在实际项目中,我们接触到的数据类型有很多,比如 Int、list、NumPy 等。为了让数据在 各个阶段畅通无阻,不同数据类型与 Tensor 之间的转换就非常重要了。接下来我们一起 来看看 int、list、NumPy 是如何与 Tensor 互相转换的。
int 与 Tensor 的转换:
>>> a = torch.Tensor([1])
>>> b = a.item()
>>> b
1.0
我们通过 torch.Tensor 将一个数字(或者标量)转换为 Tensor,又通过 item() 函数,将 Tensor 转换为数字(标量),item() 函数的作用就是将 Tensor 转换为一个 python number。
list 与 tensor 的转换:
>>> a = [1, 2, 3]
>>> b = torch.Tensor(a)
>>> c = b.numpy().tolist()
>>> c
[1.0, 2.0, 3.0]
在这里对于一个 list a,我们仍旧直接使用 torch.Tensor,就可以将其转换为 Tensor 了。 而还原回来的过程要多一步,需要我们先将 Tensor 转为 NumPy 结构,之后再使用 tolist() 函数得到 list。
NumPy 与 Tensor 的转换:
有了前面两个例子,你是否能想到 NumPy 怎么转换为 Tensor 么?对,我们仍旧 torch.Tensor 即可,是不是特别方便。
CPU 与 GPU 的 Tensor 之间的转换:
CPU->GPU: data.cuda()
GPU->CPU: data.cpu()
三、Tensor 的常用操作
好,刚才我们一起了解了 Tensor 的类型,如何创建 Tensor,以及如何实现 Tensor 和一 些常见的数据类型之间的相互转换。其实 Tensor 还有一些比较常用的功能,比如获取形 状、维度转换、形状变换以及增减维度,接下来我们一起来看看这些功能。
获取形状
在深度学习网络的设计中,我们需要时刻对 Tensor 的情况做到了如指掌,其中就包括获 取 Tensor 的形式、形状等。
为了得到 Tensor 的形状,我们可以使用 shape 或 size 来获取。两者的不同之处在于, shape 是 torch.tensor 的一个属性,而 size() 则是一个 torch.tensor 拥有的方法。
>>> a = torch.zeros(2, 3, 5)
>>> a.shape
torch.Size([2, 3, 5])
>>> a.size()
torch.Size([2, 3, 5])

知道了 Tensor 的形状,我们就能知道这个 Tensor 所包含的元素的数量了。具体的计算方 法就是直接将所有维度的大小相乘,比如上面的 Tensor a 所含有的元素的个数为 235=30 个。这样似乎有点麻烦,我们在 PyTorch 中可以使用 numel() 函数直接统计元素数量。
>>> a.numel()
30
矩阵转置(维度转换)
在 PyTorch 中有两个函数,分别是 permute() 和 transpose() 可以用来实现矩阵的转秩, 或者说交换不同维度的数据。比如在调整卷积层的尺寸、修改 channel 的顺序、变换全连接层的大小的时候,我们就要用到它们。
其中,用 permute 函数可以对任意高维矩阵进行转置,但只有 tensor.permute() 这个调用方式,我们先看一下代码:
>>> x = torch.rand(2,3,5)
>>> x.shape
torch.Size([2, 3, 5])
>>> x = x.permute(2,1,0)
>>> x.shape
torch.Size([5, 3, 2])
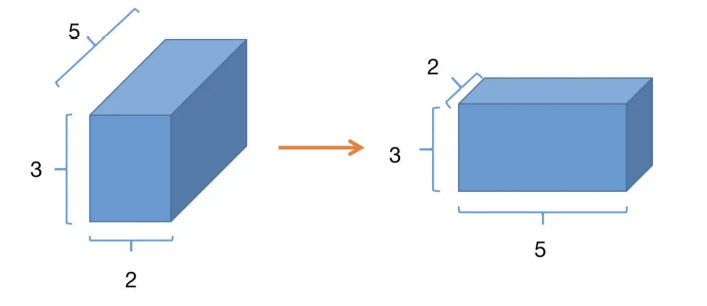
有没有发现,原来的 Tensor 的形状是[2,3,5],我们在 permute 中分别写入原来索引位置 的新位置,x.permute(2,1,0),2 表示原来第二个维度现在放在了第零个维度;同理 1 表示 原来第一个维度仍旧在第一个维度;0 表示原来第 0 个维度放在了现在的第 2 个维度,形 状就变成了[5,3,2]。
而另外一个函数 transpose,不同于 permute,它每次只能转换两个维度,或者说交换两 个维度的数据。我们还是来看一下代码:
>>> x.shape
torch.Size([5, 3, 2])
>>> x = x.transpose(1,0)
>>> x.shape
torch.Size([3, 5, 2])
需要注意的是,经过了 transpose 或者 permute 处理之后的数据,变得不再连续了,什 么意思呢?
还是接着刚才的例子说,我们使用 torch.rand(2,3,4) 得到的 tensor,在内存中是连续的, 但是经过 transpose 或者 permute 之后呢,比如 transpose(1,0),内存虽然没有变化, 但是我们得到的数据“看上去”是第 0 和第 1 维的数据发生了交换,现在的第 0 维是原来 的第 1 维,所以 Tensor 都会变得不再连续。
那你可能会问了,不连续就不连续呗,好像也没啥影响吧?这么想你就草率了,我们继续 来看看 Tensor 的形状变换,学完以后你就知道 Tensor 不连续的后果了。
形状变换
在 PyTorch 中有两种常用的改变形状的函数,分别是 view 和 reshape。我们先来看一下 view。
>>> x = torch.randn(4, 4)
>>> x.shape
torch.Size([4, 4])
>>> x = x.view(2,8)
>>> x.shape
torch.Size([2, 8])
我们先声明了一个[4, 4]大小的 Tensor,然后通过 view 函数,将其修改为[2, 8]形状的 Tensor。我们还是继续刚才的 x,再进行一步操作,代码如下:
>>> x = x.permute(1,0)
>>> x.shape
torch.Size([8, 2])
>>> x.view(4, 4)
Traceback (most recent call last):
File "<stdin>", line 1, in <module>
RuntimeError: view size is not compatible with input tensor's size and stride (at least one dimension spans across two contiguous subspaces). Use .reshape(...) instead.
结合代码可以看到,利用 permute,我们将第 0 和第 1 维度的数据进行了变换,得到了 [8, 2]形状的 Tensor,在这个新 Tensor 上进行 view 操作,忽然就报错了,为什么呢?其 实就是因为 view 不能处理内存不连续 Tensor 的结构。
那这时候要怎么办呢?我们可以使用另一个函数,reshape:
>>> x = x.reshape(4, 4)
>>> x.shape
torch.Size([4, 4])
增减维度
有时候我们需要对 Tensor 增加或者删除某些维度,比如删除或者增加图片的几个通道。 PyTorch 提供了 squeeze() 和 unsqueeze() 函数解决这个问题。
我们先来看 squeeze()。如果 dim 指定的维度的值为 1,则将该维度删除,若指定的维度 值不为 1,则返回原来的 Tensor。为了方便你理解,我还是结合例子来讲解。
>>> x = torch.rand(2,1,3)
>>> x.shape
torch.Size([2, 1, 3])
>>> y = x.squeeze(1)
>>> y.shape
torch.Size([2, 3])
>>> z = y.squeeze(1)
>>> z.shape
torch.Size([2, 3])
结合代码我们可以看到,我们新建了一个维度为[2, 1, 3]的 Tensor,然后将第 1 维度的数 据删除,得到 y,squeeze 执行成功是因为第 1 维度的大小为 1。然而在 y 上我们打算进 一步删除第 1 维度的时候,就会发现删除失败了,这是因为 y 此刻的第 1 维度的大小为 3,suqeeze 不能删除。
unsqueeze():这个函数主要是对数据维度进行扩充。给指定位置加上维数为 1 的维度, 我们同样结合代码例子来看看。
>>> x = torch.rand(2,1,3)
>>> y = x.unsqueeze(2)
>>> y.shape
torch.Size([2, 1, 1, 3])
这里我们新建了一个维度为[2, 1, 3]的 Tensor,然后在第 2 维度插入一个数据,这样就得 到了一个[2,1,1,3]大小的 tensor。
四、Tensor 的连接操作
在项目开发中,深度学习某一层神经元的数据可能有多个不同的来源,那么就需要将数据 进行组合,这个组合的操作,我们称之为连接。
cat
连接的操作函数如下:
torch.cat(tensors, dim = 0, out = None)
cat 是 concatnate 的意思,也就是拼接、联系的意思。该函数有两个重要的参数需要你掌 握。
第一个参数是 tensors,它很好理解,就是若干个我们准备进行拼接的 Tensor。
第二个参数是 dim,我们回忆一下 Tensor 的定义,Tensor 的维度(秩)是有多种情况 的。比如有两个 3 维的 Tensor,可以有几种不同的拼接方式(如下图),dim 参数就可 以对此作出约定。

看到这里,你可能觉得上面画的图是三维的,看起来比较晦涩,所以咱们先从简单的二维 的情况说起,我们先声明两个 3x3 的矩阵,代码如下:
>>> A=torch.ones(3,3)
>>> B=2*torch.ones(3,3)
>>> A
tensor([[1., 1., 1.],
[1., 1., 1.],
[1., 1., 1.]])
>>> B
tensor([[2., 2., 2.],
[2., 2., 2.],
[2., 2., 2.]])
我们先看看 dim=0 的情况,拼接的结果是怎样的:
>>> C=torch.cat((A,B),0)
>>> C
tensor([[1., 1., 1.],
[1., 1., 1.],
[1., 1., 1.],
[2., 2., 2.],
[2., 2., 2.],
[2., 2., 2.]])
你会发现,两个矩阵是按照“行”的方向拼接的。
我们接下来再看看,dim=1 的情况是怎样的:
>>> D=torch.cat((A,B),1)
>>> D
tensor([[1., 1., 1., 2., 2., 2.],
[1., 1., 1., 2., 2., 2.],
[1., 1., 1., 2., 2., 2.]])
显然,两个矩阵,是按照“列”的方向拼接的。那如果 Tensor 是三维甚至更高维度的 呢?其实道理也是一样的,dim 的数值是多少,两个矩阵就会按照相应维度的方向链接两个 Tensor。
看到这里你可能会问了,cat 实际上是将多个 Tensor 在已有的维度上进行连接,那如果想 增加新的维度进行连接,又该怎么做呢?这时候就需要 stack 函数登场了。
stack
为了让你加深理解,我们还是结合具体例子来看看。假设我们有两个二维矩阵 Tensor,把 它们“堆叠”放在一起,构成一个三维的 Tensor,如下图:
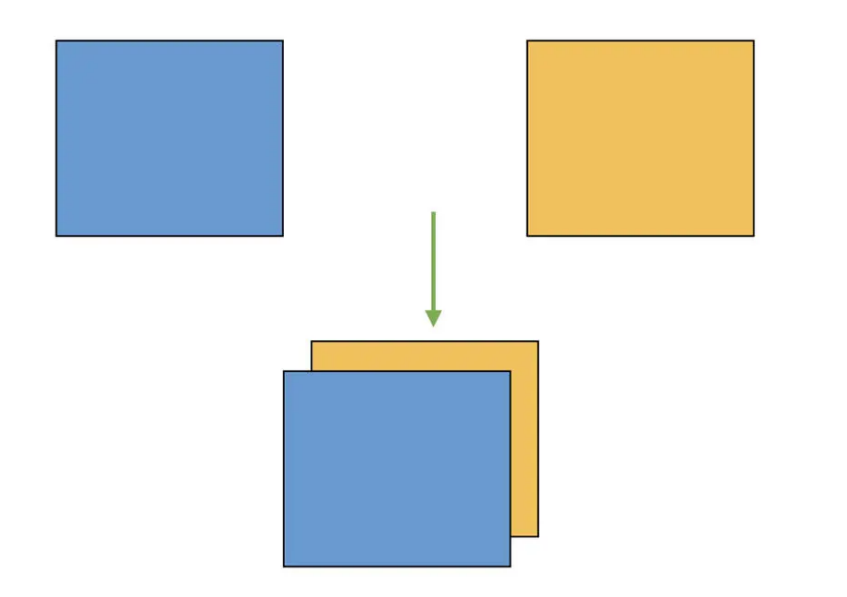
这相当于原来的维度(秩)是 2,现在变成了 3,变成了一个立体的结构,增加了一个维 度。你需要注意的是,这跟前面的 cat 不同,cat 中示意图的例子,原来就是 3 维的,cat 之后仍旧是 3 维的,而现在咱们是从 2 维变成了 3 维。
在实际图像算法开发中,咱们有时候需要将多个单通道 Tensor(2 维)合并,得到多通道 的结果(3 维)。而实现这种增加维度拼接的方法,我们把它叫做 stack。
stack 函数的定义如下:
torch.stack(inputs, dim=0)
其中,inputs 表示需要拼接的 Tensor,dim 表示新建立维度的方向。
那 stack 如何使用呢?我们一块来看一个例子:
>>> A=torch.arange(0,4)
>>> A
tensor([0, 1, 2, 3])
>>> B=torch.arange(5,9)
>>> B
tensor([5, 6, 7, 8])
>>> C=torch.stack((A,B),0)
>>> C
tensor([[0, 1, 2, 3],
[5, 6, 7, 8]])
>>> D=torch.stack((A,B),1)
>>> D
tensor([[0, 5],
[1, 6],
[2, 7],
[3, 8]])
结合代码,我们可以看到,首先我们构建了两个 4 元素向量 A 和 B,它们的维度是 1。然 后,我们在 dim=0,也就是“行”的方向上新建一个维度,这样维度就成了 2,也就得到 了 C。而对于 D,我们则是在 dim=1,也就是“列”的方向上新建维度。
五、Tensor 的切分操作
学完了连接操作之后,我们再来看看连接的逆操作:切分。
切分就是连接的逆过程,有了刚才的经验,你很容易就会想到,切分的操作也应该有很多 种,比如切片、切块等。没错,切分的操作主要分为三种类型:chunk、split、unbind。
乍一看有不少,其实是因为它们各有特点,适用于不同的使用情景,让我们一起看一下。
chunk
chunk 的作用就是将 Tensor 按照声明的 dim,进行尽可能平均的划分。
比如说,我们有一个 32channel 的特征,需要将其按照 channel 均匀分成 4 组,每组 8 个 channel,这个切分就可以通过 chunk 函数来实现。具体函数如下:
torch.chunk(input, chunks, dim=0)
我们挨个来看看函数中涉及到的三个参数:
首先是 input,它表示要做 chunk 操作的 Tensor。
接着,我们看下 chunks,它代表将要被划分的块的数量,而不是每组的数量。请注意, chunks 必须是整型。
最后是 dim,想想这个参数是什么意思呢?对,就是按照哪个维度来进行 chunk。
还是跟之前一样,我们通过几个代码例子直观感受一下。我们从一个简单的一维向量开始:
>>> A=torch.tensor([x for x in range(1,11)])
>>> B = torch.chunk(A, 2, 0)
>>> B
(tensor([1, 2, 3, 4, 5]), tensor([ 6, 7, 8, 9, 10]))
这里我们通过 chunk 函数,将原来 10 位长度的 Tensor A,切分成了两个一样 5 位长度 的向量。(注意,B 是两个切分结果组成的 tuple)。
那如果 chunk 参数不能够整除的话,结果会是怎样的呢?我们接着往下看:
>>> B = torch.chunk(A, 3, 0)
>>> B
(tensor([1, 2, 3, 4]), tensor([5, 6, 7, 8]), tensor([ 9, 10]))
我们发现,10 位长度的 Tensor A,切分成了三个向量,长度分别是 4,4,2 位。这是怎 么分的呢,不应该是 3,3,4 这样更为平均的方式么?
想要解决问题,就得找到规律。让我们再来看一个更大一点的例子,将 A 改为 17 位长度。
>>> A=torch.tensor([x for x in range(1, 18)])
>>> B = torch.chunk(A, 4, 0)
>>> B
(tensor([1, 2, 3, 4, 5]), tensor([ 6, 7, 8, 9, 10]), tensor([11, 12, 13, 14, 15]), tensor([16, 17]))
17 位长度的 Tensor A,切分成了四个分别为 5,5,5,2 位长度的向量。这时候你就会 发现,其实在计算每个结果元素个数的时候,chunk 函数是先做除法,然后再向上取整得 到每组的数量。
比如上面这个例子,17/4=4.25,向上取整就是 5,那就先逐个生成若干个长度为 5 的向 量,最后不够的就放在一块,作为最后一个向量(长度 2)。
那如果 chunk 参数大于 Tensor 可以切分的长度,又要怎么办呢?我们实际操作一下,代 码如下:
>>> A=torch.tensor([1,2,3])
>>> B = torch.chunk(A, 5, 0)
>>> B
(tensor([1]), tensor([2]), tensor([3]))
显然,被切分的 Tensor 只能分成若干个长度为 1 的向量。
由此可以推论出二维的情况,我们再举一个例子, 看看二维矩阵 Tensor 的情况 :
>>> A=torch.ones(4,4)
>>> A
tensor([[1., 1., 1., 1.],
[1., 1., 1., 1.],
[1., 1., 1., 1.],
[1., 1., 1., 1.]])
>>> B = torch.chunk(A, 2, 0)
>>> B
(tensor([[1., 1., 1., 1.],
[1., 1., 1., 1.]]),
tensor([[1., 1., 1., 1.],
[1., 1., 1., 1.]]))
还是跟前面的 cat 一样,这里的 dim 参数,表示的是第 dim 维度方向上进行切分。
刚才介绍的 chunk 函数,是按照“切分成确定的份数”来进行切分的,那如果想按照“每 份按照确定的大小”来进行切分,该怎样做呢?PyTorch 也提供了相应的方法,叫做 split。
split
split 的函数定义如下,跟前面一样,我们还是分别看看这里涉及的参数。
torch.split(tensor, split_size_or_sections, dim=0)
首先是 tensor,也就是待切分的 Tensor。
然后是 split_size_or_sections 这个参数。当它为整数时,表示将 tensor 按照每块大小为 这个整数的数值来切割;当这个参数为列表时,则表示将此 tensor 切成和列表中元素一样 大小的块。
最后同样是 dim,它定义了要按哪个维度切分。
同样的,我们举几个例子来看一下 split 的具体操作。首先是 split_size_or_sections 是整数的情况:
>>> A=torch.rand(4,4)
>>> A
tensor([[0.3480, 0.4864, 0.2071, 0.6849],
[0.5214, 0.6468, 0.9263, 0.6596],
[0.8465, 0.0030, 0.9253, 0.3342],
[0.7469, 0.4648, 0.8200, 0.4193]])
>>> B=torch.split(A, 2, 0)
>>> B
(tensor([[0.3480, 0.4864, 0.2071, 0.6849],
[0.5214, 0.6468, 0.9263, 0.6596]]), tensor([[0.8465, 0.0030, 0.9253, 0.3342],
[0.7469, 0.4648, 0.8200, 0.4193]]))
在这个例子里,我们看到,原来 4x4 大小的 Tensor A,沿着第 0 维度,也就是 沿“行”的方向,按照每组 2“行”的大小进行切分,得到了两个 2x4 大小的 Tensor。
那么问题来了,如果 split_size_or_sections 不能整除对应方向的大小的话,会有怎样的结 果呢?我们将代码稍作修改就好了:
>>> C=torch.split(A, 3, 0)
>>> C
(tensor([[0.3480, 0.4864, 0.2071, 0.6849],
[0.5214, 0.6468, 0.9263, 0.6596],
[0.8465, 0.0030, 0.9253, 0.3342]]), tensor([[0.7469, 0.4648, 0.8200, 0.4193]]))
根据刚才的代码我们就能发现,原来,PyTorch 会尽可能凑够每一个结果,使得其对应 dim 的数据大小等于 split_size_or_sections。如果最后剩下的不够,那就把剩下的内容放 到一块,作为最后一个结果。
接下来,我们再看一下 split_size_or_sections 是列表时的情况。刚才提到了,当 split_size_or_sections 为列表的时候,表示将此 tensor 切成和列表中元素大小一样的大 小的块,我们来看一段对应的代码:
>>> A=torch.rand(5,4)
>>> A
tensor([[0.0871, 0.9387, 0.2978, 0.8540],
[0.4216, 0.5009, 0.6090, 0.1782],
[0.7486, 0.6665, 0.3248, 0.9010],
[0.0457, 0.1507, 0.5208, 0.3595],
[0.4709, 0.9482, 0.0524, 0.0906]])
>>> B=torch.split(A,(2,3),0)
>>> B
(tensor([[0.0871, 0.9387, 0.2978, 0.8540],
[0.4216, 0.5009, 0.6090, 0.1782]]), tensor([[0.7486, 0.6665, 0.3248, 0.9010],
[0.0457, 0.1507, 0.5208, 0.3595],
[0.4709, 0.9482, 0.0524, 0.0906]]))
这部分代码怎么解释呢?其实也很好理解,就是将 Tensor A,沿着第 0 维进行切分,每一 个结果对应维度上的尺寸或者说大小,分别是 2(行),3(行)。
unbind
通过学习前面的几个函数,咱们知道了怎么按固定大小做切分,或者按照索引 index 来进 行选择。现在我们想象一个应用场景,如果我们现在有一个 3 channel 图像的 Tensor,想 要逐个获取每个 channel 的数据,该怎么做呢?
假如用 chunk 的话,我们需要将 chunks 设为 3;如果用 split 的话,需要将 split_size_or_sections 设为 1。
虽然它们都可以实现相同的目的,但是如果 channel 数量很大,逐个去取也比较折腾。这 时候,就需要用到另一个函数:unbind,它的函数定义如下:
torch.unbind(input, dim=0)
其中,input 表示待处理的 Tensor,dim 还是跟前面的函数一样,表示切片的方向。
我们结合例子来理解:
>>> A=torch.arange(16).view(4,4)
>>> A
tensor([[ 0, 1, 2, 3],
[ 4, 5, 6, 7],
[ 8, 9, 10, 11],
[12, 13, 14, 15]])
>>> b=torch.unbind(A, 0)
>>>
>>> b
(tensor([0, 1, 2, 3]), tensor([4, 5, 6, 7]), tensor([ 8, 9, 10, 11]), tensor([12, 13, 14, 15]))
在这个例子中,我们首先创建了一个 4x4 的二维矩阵 Tensor,随后我们从第 0 维,也就 是“行”的方向进行切分 ,因为矩阵有 4 行,所以就会得到 4 个结果。
接下来,我们看一下:如果从第 1 维,也就是“列”的方向进行切分,会是怎样的结果 呢:
>>> b=torch.unbind(A, 1)
>>> b
(tensor([ 0, 4, 8, 12]), tensor([ 1, 5, 9, 13]), tensor([ 2, 6, 10, 14]), tensor([ 3, 7, 11, 15]))
不难发现,这里是按照“列”的方向进行拆解的。所以,unbind 是一种降维切分的方 式,相当于删除一个维度之后的结果。
六、Tensor 的索引操作
你有没有发现,刚才我们讲的 chunk 和 split 操作,我们都是将数据整体进行切分,并获 得全部结果。但有的时候,我们只需要其中的一部分,这要怎么做呢?一个很自然的想法 就是,直接告诉 Tensor 我想要哪些部分,这种方法我们称为索引操作。
索引操作有很多方式,有提供好现成 API 的,也有用户自行定制的操作,其中最常用的两 个操作就是 index_select 和 masked_select,我们分别去看看用法。
index_select
这里就需要 index_select 这个函数了,其定义如下:
torch.index_select(tensor, dim, index)
这里的 tensor、dim 跟前面函数里的一样,不再赘述。我们重点看一看 index,它表示从 dim 维度中的哪些位置选择数据,这里需要注意,index是 torch.Tensor 类型。
还是跟之前一样,我们来看几个示例代码:
>>> A=torch.arange(16).view(4,4)
>>> A
tensor([[ 0, 1, 2, 3],
[ 4, 5, 6, 7],
[ 8, 9, 10, 11],
[12, 13, 14, 15]])
>>> B=torch.index_select(A,0,torch.tensor([1,3]))
>>> B
tensor([[ 4, 5, 6, 7],
[12, 13, 14, 15]])
>>> C=torch.index_select(A,1,torch.tensor([0,3]))
>>> C
tensor([[ 0, 3],
[ 4, 7],
[ 8, 11],
[12, 15]])
在这个例子中,我们先创建了一个 4x4 大小的矩阵 Tensor A。然后,我们从第 0 维选择 第 1(行)和 3(行)的数据,并得到了最终的 Tensor B,其大小为 2x4。随后我们从 Tensor A 中选择第 0(列)和 3(列)的数据,得到了最终的 Tensor C,其大小为 4x2。
怎么样,是不是非常简单?
masked_select
刚才介绍的 indexed_select,它是基于给定的索引来进行数据提取的。但有的时候,我们 还想通过一些判断条件来进行选择,比如提取深度学习网络中某一层中数值大于 0 的参数。
这时候,就需要用到 PyTorch 提供的 masked_select 函数了,我们先来看它的定义:
torch.masked_select(input, mask, out=None)
这里我们只需要关心前两个参数,input 和 mask。
input 表示待处理的 Tensor。mask 代表掩码张量,也就是满足条件的特征掩码。这里你 需要注意的是,mask 须跟 input 张量有相同数量的元素数目,但形状或维度不需要相同。
你是不是还感觉有些云里雾里?让我来举一个例子,你看了之后,一下子就能明白。
你在平时的练习中有没有想过,如果我们让 Tensor 和数字做比较,会有什么样的结果? 比如后面这段代码,我们随机生成一个 5 位长度的 Tensor A:
>>> A=torch.rand(5)
>>> A
tensor([0.7484, 0.7311, 0.6890, 0.0034, 0.3469])
>>> B=A>0.3
>>> B
tensor([ True, True, True, False, True])
在这段代码里,我们让 A 跟 0.3 做比较,得到了一个新的 Tensor,内部每一个数值表示 的是 A 中对应数值是否大于 0.3。
比如第一个数值原来是 0.3731,大于 0.3,所以是 True;最后一个数值 0.2285 小于 0.3,所以是 False。
这个新的 Tensor 其实就是一个掩码张量,它的每一位表示了一个判断条件是否成立的结果。
然后,我们继续写一段代码,看看基于掩码 B 的选择是怎样的结果 :
>>> C=torch.masked_select(A, B)
>>> C
tensor([0.7484, 0.7311, 0.6890, 0.3469])
你会发现,C 实际上得到的就是:A 中“满足 B 里面元素值为 True 的”对应位置的数据。
好了,这下你应该知道了 masked_select 的作用了吧?其实就是我们根据要筛选的条件, 得到一个掩码张量,然后用这个张量去提取 Tensor 中的数据。
根据这个思路,上面的例子就可以简化为:
>>> A=torch.rand(5)
>>> A
tensor([0.8546, 0.7931, 0.5147, 0.7306, 0.2706])
>>> C=torch.masked_select(A, A>0.3)
>>> C
tensor([0.8546, 0.7931, 0.5147, 0.7306])
是不是非常简单呢?
再来做一个小练习:
现在有个 Tensor,如下:
>>> A=torch.tensor([[4,5,7], [3,9,8],[2,3,4]])
>>> A
tensor([[4, 5, 7],
[3, 9, 8],
[2, 3, 4]])
我们想提取出其中第一行的第一个,第二行的第一、第二个,第三行的最后一个,该怎么做呢?
很明显,通过masked_select()就可以做到:
>>> B = torch.tensor([[1,0,0],[1,1,0],[0,0,1]])
>>> C = B==1
>>> C
tensor([[ True, False, False],
[ True, True, False],
[False, False, True]])
>>> D = torch.masked_select(A, C)
>>> D
tensor([4, 3, 9, 4])
Tensor 中的主要函数跟用法还有很多,总结如下表,我们在使用的时候,根据需要灵活查询相关的参数列表即可:
