前言回顾
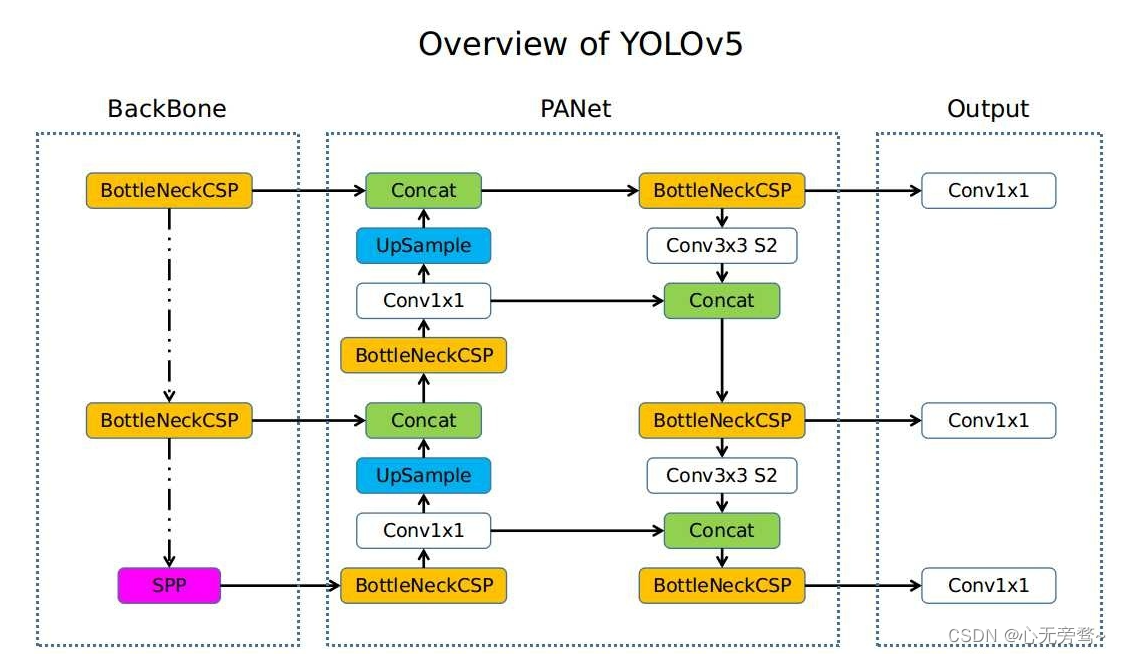
在这里粗略回顾一下YOLOv5,这里直接提供YOLOv5的整理的结构图吧
- Backbone:CSPDarkNet结构,主要结构思想的体现在C3模块,这里也是梯度分流的主要思想所在的地方;
- PAN-FPN:双流的FPN,必须香,也必须快,但是量化还是有些需要图优化才可以达到最优的性能,比如cat前后的scale优化等等,这里除了上采样、CBS卷积模块,最为主要的还有C3模块(记住这个C3模块哦);
- Head:Coupled Head+Anchor-base,毫无疑问,YOLOv3、YOLOv4、YOLOv5、YOLOv7都是Anchor-Base的,后面会变吗?
- Loss:分类用BEC Loss,回归用CIoU Loss。
众所周知,YOLOv5推出的时候,只推出了代码,没有发布论文。尽管其代码功能完善强大,但是由于没有原汁原味的论文,导致了大多数学者的遗憾。
而今天,YOLOv5研发公司Ultralytics再次推出YOLO系列的YOLOv8模型,同时还爆料声称这次将会发布论文到arxiv.org。这对于大部分研究者而言无疑是一个很不错的福音。
Ultralytics YOLOv8 是由 Ultralytics开发的一个前沿 SOTA 模型。它在以前 YOLO 版本的成功基础上,引入了新的功能和改进,进一步提升了性能和灵活性。YOLOv8 基于快速、准确和易于使用的理念设计,使其成为广泛的物体检测、图像分割和图像分类任务的绝佳选择。
YOLOv8的模型图如下:
总结来说yolov8更新大概是以下几点:
- Backbone:使用的依旧是CSP的思想,不过YOLOv5中的C3模块被替换成了C2f模块,实现了进一步的轻量化,同时YOLOv8依旧使用了YOLOv5等架构中使用的SPPF模块;
- PAN-FPN:毫无疑问YOLOv8依旧使用了PAN的思想,不过通过对比YOLOv5与YOLOv8的结构图可以看到,YOLOv8将YOLOv5中PAN-FPN上采样阶段中的卷积结构删除了,同时也将C3模块替换为了C2f模块;
- Decoupled-Head:是不是嗅到了不一样的味道?是的YOLOv8走向了Decoupled-Head;
- YOLOv8抛弃了以往的Anchor-Base,使用了Anchor-Free的思想;
- 损失函数:YOLOv8使用VFL Loss作为分类损失,使用DFL Loss+CIOU Loss作为分类损失;
- 样本匹配:YOLOv8抛弃了以往的IOU匹配或者单边比例的分配方式,而是使用了Task-Aligned Assigner匹配方式。
现在已经可以查看YOLOv8官方使用文档,虽然代码现在还没有公布。
模型优点
- YOLOv8的一个关键特性是它的可扩展性。它被设计成一个支持YOLO所有以前版本的框架,使得在不同版本之间切换和比较它们的性能变得很容易。这使得YOLOv8成为那些想要利用最新YOLO技术的用户的理想选择,同时仍然能够使用他们现有的YOLO模型。
- 除了其可扩展性,YOLOv8还包括许多其他创新,使其成为广泛的对象检测和图像分割任务的吸引人的选择。其中包括一个新的骨干网,一个新的无锚检测头,和一个新的损失函数。YOLOv8也非常高效,可以在各种硬件平台上运行,从cpu到gpu。
- 总的来说,YOLOv8是一个强大而灵活的对象检测和图像分割工具,提供了最好的两个世界:最新的SOTA技术和使用和比较所有以前的YOLO版本的能力。
Github官方模型文件
官网地址:https://github.com/ultralytics/ultralytics/tree/main/ultralytics/models/v8