前言
作为当前先进的深度学习目标检测算法YOLOv8,已经集合了大量的trick,但是还是有提高和改进的空间,针对具体应用场景下的检测难点,可以不同的改进方法。此后的系列文章,将重点对YOLOv8的如何改进进行详细的介绍,目的是为了给那些搞科研的同学需要创新点或者搞工程项目的朋友需要达到更好的效果提供自己的微薄帮助和参考。由于出到YOLOv8,YOLOv7、YOLOv5算法2020年至今已经涌现出大量改进论文,这个不论对于搞科研的同学或者已经工作的朋友来说,研究的价值和新颖度都不太够了,为与时俱进,以后改进算法以YOLOv7为基础,此前YOLOv5改进方法在YOLOv7同样适用,所以继续YOLOv5系列改进的序号。另外改进方法在YOLOv5等其他目标检测算法同样可以适用进行改进。希望能够对大家有帮助。
一、解决问题
尝试引入最新最先进的Transfomer模块,提高对特征的提取能力,从而提升检测效果。
二、基本原理
论文原文:[2304.08069] DETRs Beat YOLOs on Real-time Object Detection (arxiv.org)

摘要:近年来,基于变压器的端到端检测器(DETR)取得了显著的性能。然而,DETR的高计算成本问题尚未得到有效解决,这限制了它们的实际应用,并使它们无法充分利用无后处理的好处,例如非最大值抑制(NMS)。本文首先分析了现代实时对象检测器中NMS对推理速度的影响,并建立了端到端速度基准。为了避免NMS引起的推理延迟,我们提出了一种实时检测TRansformer(RT-DETR),这是我们所知的第一个实时端到端对象检测器。具体而言,我们设计了一种高效的混合编码器,通过解耦尺度内交互和跨尺度融合来高效处理多尺度特征,并提出了IoU感知查询选择,以提高对象查询的初始化能力。此外,我们提出的检测器支持通过使用不同的解码器层来灵活调整推理速度,而不需要重新训练,这有助于实时对象检测器的实际应用。我们的RT-DETR-L在COCO val2017上实现了53.0%的AP,在T4 GPU上实现了114 FPS,而RT-DETR-X实现了54.8%的AP和74 FPS,在速度和精度方面都优于相同规模的所有YOLO检测器。此外,我们的RT-DETR-R50实现了53.1%的AP和108 FPS,在精度上比DINO-Deformable-DETR-R5高出2.2%的AP,在FPS上高出约21倍。
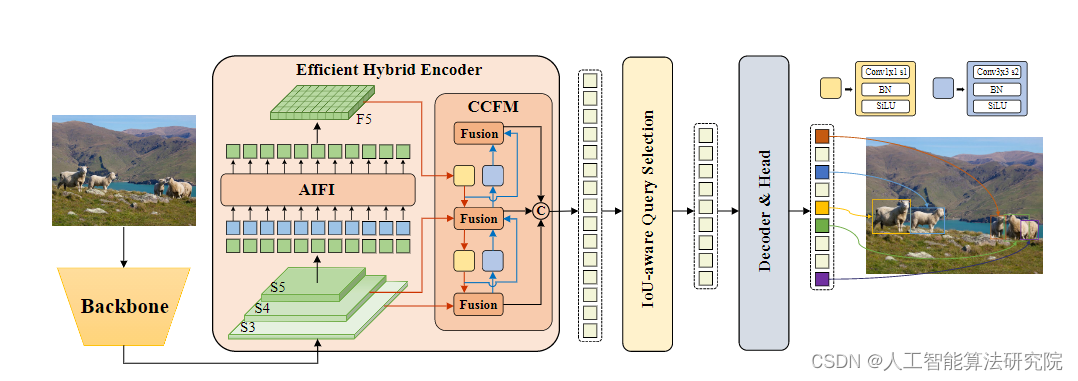
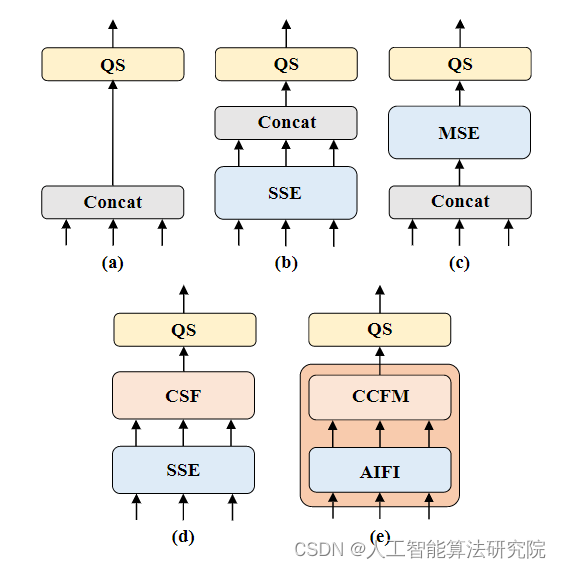
RT-DETR作者团队认为只需将Encoder作用在S5 特征上,既可以大幅度地减小计算量、提高计算速度,又不会损伤到模型的性能。为了验证这一点,作者团队设计了若干对照组。
三、添加方法
以下为改进前后的参数量,具体改进方法关注后私信咨询。
改进前:

改进后: 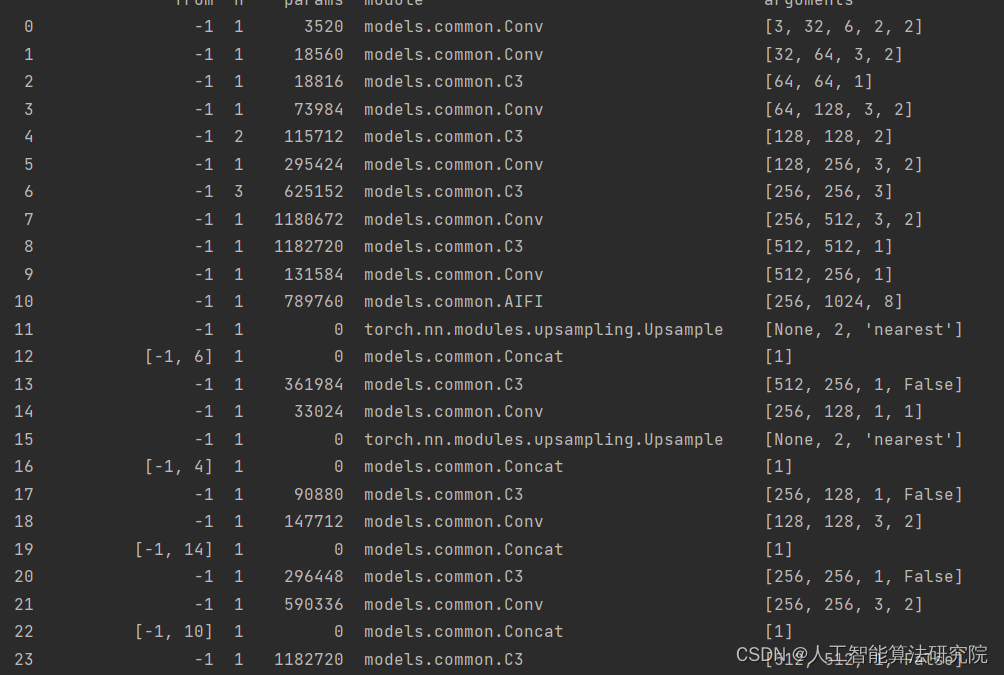

四、总结
预告一下:下一篇内容将继续分享深度学习算法相关改进方法。有兴趣的朋友可以关注一下我,有问题可以留言或者私聊我哦
PS:该方法不仅仅是适用改进YOLOv5,也可以改进其他的YOLO网络以及目标检测网络,比如YOLOv7、v6、v4、v3,Faster rcnn ,ssd等。
最后,有需要的请关注私信我吧。关注免费领取深度学习算法学习资料!