1、pytorch 基础训练
上一节为基础
视频与AI,与进程交互(二) pytorch 极简训练自己的数据集并识别
接着上面一节,我们开始使用迁移学习,训练自己的数据集和保存网络,加载网络并识别。
2、 pytorch加载resnet18
RetNet网络的基础是残差网络,其本架构是ResNet,顾名思义,网络的深度是18层。包括池化,激活,线性,不包括批量归一,池化,那为什么要加载resnet18 ?因为可以使用已经建立的模型,并且微调输出,pytorch里面,在自己收集的图像数据集上训练深度学习模型,可以使用 torchvision 中提供的在 ImageNet 上预训练好的图像分类模型。这样可以节省大量的时间,使用微调模型,最后的resnet18 模型输出层重置,实现了迁移学习。
2.1 数据标准化处理 标准化
定义:数据标准化处理:transforms.Normalize()
数据标准化,一般来说,即均值(mean)为0,标准差(std)为1
简单来说就是将数据按通道进行计算,将每一个通道的数据先计算出其方差与均值,然后再将其每一个通道内的每一个数据减去均值,再除以方差,得到归一化后的结果。标准化处理之后,可以使数据更好的响应激活函数,提高数据的表现力,减少梯度爆炸和梯度消失的出现。
from __future__ import print_function, division
import torch
import torch.nn as nn
import torch.optim as optim
from torch.optim import lr_scheduler
import torch.backends.cudnn as cudnn
import numpy as np
import torchvision
from torchvision import datasets, models, transforms
import matplotlib.pyplot as plt
import time
import os
import copy
#通过设置让内置的cuDNN的auto-tuner自动寻找最适合当前配置的高效算法,来达到优化运行效率的问题
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print(device)
cudnn.benchmark = True
plt.ion() # interactive mode 交互模式
#定义三个全局变量
dataloaders=None
dataset_sizes =None
class_names = None
定义标准化函数,里面的数值为resnet 网络标准化数值,不是随便写的。
#标准化函数
data_transforms = {
'train': transforms.Compose([
transforms.RandomResizedCrop(224),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
]),
'val': transforms.Compose([
transforms.Resize(256),
transforms.CenterCrop(224),
transforms.ToTensor(),
]),
}
2.2 训练函数
接下来进行训练函数的编写,参数已经解释
def train_model(model, criterion, optimizer, scheduler, num_epochs=25):
""" 训练模型,并返回在最佳模型
参数:
- model(nn.Module): 要训练的模型
- criterion: 损失函数
- optimizer(optim.Optimizer): 优化器
- scheduler: 学习率调度器
- num_epochs(int): 最大 epoch 数
返回:
- model(nn.Module): 最佳模型
- best_acc(float): checkpoint最好准确率
"""
since = time.time()
best_model_wts = copy.deepcopy(model.state_dict())
best_acc = 0.0
for epoch in range(num_epochs):
print(f'Epoch {
epoch}/{
num_epochs - 1}')
print('-' * 10)
# 训练集和验证集交替进行前向传播
for phase in ['train', 'val']:
if phase == 'train':
model.train() # 设置为训练模式,可以更新网络参数
else:
model.eval() # 设置为预估模式,不可更新网络参数
running_loss = 0.0
running_corrects = 0
# 遍历数据集
for inputs, labels in dataloaders[phase]:
global device
inputs = inputs.to(device)
labels = labels.to(device)
# 清空梯度,避免累加了上一次的梯度
optimizer.zero_grad()
with torch.set_grad_enabled(phase == 'train'):
# 正向传播
outputs = model(inputs)
_, preds = torch.max(outputs, 1)
loss = criterion(outputs, labels)
# 反向传播且仅在训练阶段进行优化
if phase == 'train':
loss.backward() # 反向传播
optimizer.step()
# 统计loss、准确率
running_loss += loss.item() * inputs.size(0)
running_corrects += torch.sum(preds == labels.data)
if phase == 'train':
scheduler.step()
epoch_loss = running_loss / dataset_sizes[phase]
epoch_acc = running_corrects.double() / dataset_sizes[phase]
print(f'{
phase} Loss: {
epoch_loss:.4f} Acc: {
epoch_acc:.4f}')
# 发现了更优的模型,记录起来
if phase == 'val' and epoch_acc > best_acc:
best_acc = epoch_acc
best_model_wts = copy.deepcopy(model.state_dict())
print()
time_elapsed = time.time() - since
print(f'Training complete in {
time_elapsed // 60:.0f}m {
time_elapsed % 60:.0f}s')
print(f'Best val Acc: {
best_acc:4f}')
# 加载训练的最好的模型
model.load_state_dict(best_model_wts)
return model
3、数据集的加载和放置
在data目录下放置两个目录,一个是train,一个是val,显然是训练集和验证集
三个类别,蚂蚁,蜜蜂和工程车,工程车使用上一篇文章里面的内容
工程车图像如下所示,放好就行,验证集同理
代码清单如下所示:
from __future__ import print_function, division
import torch
import torch.nn as nn
import torch.optim as optim
from torch.optim import lr_scheduler
import torch.backends.cudnn as cudnn
import numpy as np
import torchvision
from torchvision import datasets, models, transforms
import matplotlib.pyplot as plt
import time
import os
import copy
#通过设置让内置的cuDNN的auto-tuner自动寻找最适合当前配置的高效算法,来达到优化运行效率的问题
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
print(device)
cudnn.benchmark = True
plt.ion() # interactive mode 交互模式
dataloaders=None
dataset_sizes =None
class_names = None
def imshow(inp, title=None):
# 可视化一组 Tensor 的图片
inp = inp.numpy().transpose((1, 2, 0))
mean = np.array([0.485, 0.456, 0.406])
std = np.array([0.229, 0.224, 0.225])
inp = std * inp + mean
inp = np.clip(inp, 0, 1)
plt.imshow(inp)
if title is not None:
plt.title(title)
plt.pause(0.001) # 暂停一会儿,为了将图片显示出来
def train_model(model, criterion, optimizer, scheduler, num_epochs=25):
""" 训练模型,并返回在验证集上的最佳模型和准确率
Args:
- model(nn.Module): 要训练的模型
- criterion: 损失函数
- optimizer(optim.Optimizer): 优化器
- scheduler: 学习率调度器
- num_epochs(int): 最大 epoch 数
Return:
- model(nn.Module): 最佳模型
- best_acc(float): 最佳准确率
"""
since = time.time()
best_model_wts = copy.deepcopy(model.state_dict())
best_acc = 0.0
for epoch in range(num_epochs):
print(f'Epoch {
epoch}/{
num_epochs - 1}')
print('-' * 10)
# 训练集和验证集交替进行前向传播
for phase in ['train', 'val']:
if phase == 'train':
model.train() # 设置为训练模式,可以更新网络参数
else:
model.eval() # 设置为预估模式,不可更新网络参数
running_loss = 0.0
running_corrects = 0
# 遍历数据集
for inputs, labels in dataloaders[phase]:
global device
inputs = inputs.to(device)
labels = labels.to(device)
# 清空梯度,避免累加了上一次的梯度
optimizer.zero_grad()
with torch.set_grad_enabled(phase == 'train'):
# 正向传播
outputs = model(inputs)
_, preds = torch.max(outputs, 1)
loss = criterion(outputs, labels)
# 反向传播且仅在训练阶段进行优化
if phase == 'train':
loss.backward() # 反向传播
optimizer.step()
# 统计loss、准确率
running_loss += loss.item() * inputs.size(0)
running_corrects += torch.sum(preds == labels.data)
if phase == 'train':
scheduler.step()
epoch_loss = running_loss / dataset_sizes[phase]
epoch_acc = running_corrects.double() / dataset_sizes[phase]
print(f'{
phase} Loss: {
epoch_loss:.4f} Acc: {
epoch_acc:.4f}')
# 发现了更优的模型,记录起来
if phase == 'val' and epoch_acc > best_acc:
best_acc = epoch_acc
best_model_wts = copy.deepcopy(model.state_dict())
print()
time_elapsed = time.time() - since
print(f'Training complete in {
time_elapsed // 60:.0f}m {
time_elapsed % 60:.0f}s')
print(f'Best val Acc: {
best_acc:4f}')
# 加载训练的最好的模型
model.load_state_dict(best_model_wts)
return model
def visualize_model(model, num_images=6):
was_training = model.training
model.eval()
images_so_far = 0
fig = plt.figure()
with torch.no_grad():
for i, (inputs, labels) in enumerate(dataloaders['val']):
global device
inputs = inputs.to(device)
labels = labels.to(device)
outputs = model(inputs)
_, preds = torch.max(outputs, 1)
for j in range(inputs.size()[0]):
images_so_far += 1
ax = plt.subplot(num_images//2, 2, images_so_far)
ax.axis('off')
ax.set_title(f'predicted: {
class_names[preds[j]]}')
imshow(inputs.cpu().data[j])
if images_so_far == num_images:
model.train(mode=was_training)
return
model.train(mode=was_training)
def main():
# 在训练集上:扩充、归一化
# 在验证集上:归一化
data_transforms = {
'train': transforms.Compose([
transforms.RandomResizedCrop(224),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize([0.485, 0.456, 0.406], [0.229, 0.224, 0.225])
]),
'val': transforms.Compose([
transforms.Resize(256),
transforms.CenterCrop(224),
transforms.ToTensor(),
]),
}
data_dir = './data'
image_datasets = {
x: datasets.ImageFolder(os.path.join(data_dir, x),
data_transforms[x])
for x in ['train', 'val']}
global dataloaders
dataloaders = {
x: torch.utils.data.DataLoader(image_datasets[x], batch_size=4,
shuffle=True, num_workers=4)
for x in ['train', 'val']}
global dataset_sizes
dataset_sizes = {
x: len(image_datasets[x]) for x in ['train', 'val']}
global class_names
class_names = image_datasets['train'].classes
print(class_names)
# 获取一批训练数据
inputs, classes = next(iter(dataloaders['train']))
# 批量制作网格
out = torchvision.utils.make_grid(inputs)
imshow(out, title=[class_names[x] for x in classes])
model = models.resnet18(pretrained=True) # 加载预训练模型
for param in model.parameters():
param.requires_grad = False
num_ftrs = model.fc.in_features # 获取低级特征维度
model.fc = nn.Linear(num_ftrs, 3) # 替换新的输出层
model = model.to(device)
# 交叉熵作为损失函数
criterion = nn.CrossEntropyLoss()
# 所有参数都参加训练
optimizer_ft = optim.SGD(model.parameters(), lr=0.001, momentum=0.9)
# 每过 7 个 epoch 将学习率变为原来的 0.1
scheduler = optim.lr_scheduler.StepLR(optimizer_ft, step_size=7, gamma=0.1)
model_ft = train_model(model, criterion, optimizer_ft, scheduler, num_epochs=3) # 开始训练
visualize_model(model_ft)
PATH = './test.pth'
torch.save(model_ft.state_dict(), PATH)
if __name__== "__main__" :
main()
4、如何调用
我们在前面保存了pth文件,实际上使用了state_dict,他和直接模型保存是有一定的区别的
import torch
from PIL import Image
import torchvision.transforms as transforms
import matplotlib.pyplot as plt
import numpy as np
import torch.nn as nn
from torchvision import models
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
PATH = './test.pth'
transform = transforms.Compose(
[transforms.Resize((256, 256)),transforms.ToTensor(),
transforms.Normalize((0.485, 0.456, 0.406), (0.229, 0.224, 0.225))])
model = models.resnet18(pretrained=True) # 加载预训练模型
num_ftrs = model.fc.in_features # 获取低级特征维度
model.fc = nn.Linear(num_ftrs, 3) # 替换新的输出层
print(device)
model = model.to(device)
model.load_state_dict(torch.load(PATH))
model.eval()
img = Image.open("./ant.jpg") .convert('RGB')
img = transform(img)
img = img.unsqueeze(0)
img = img.to(device)
with torch.no_grad():
outputs = model(img)
_, predicted = torch.max(outputs.data, 1)
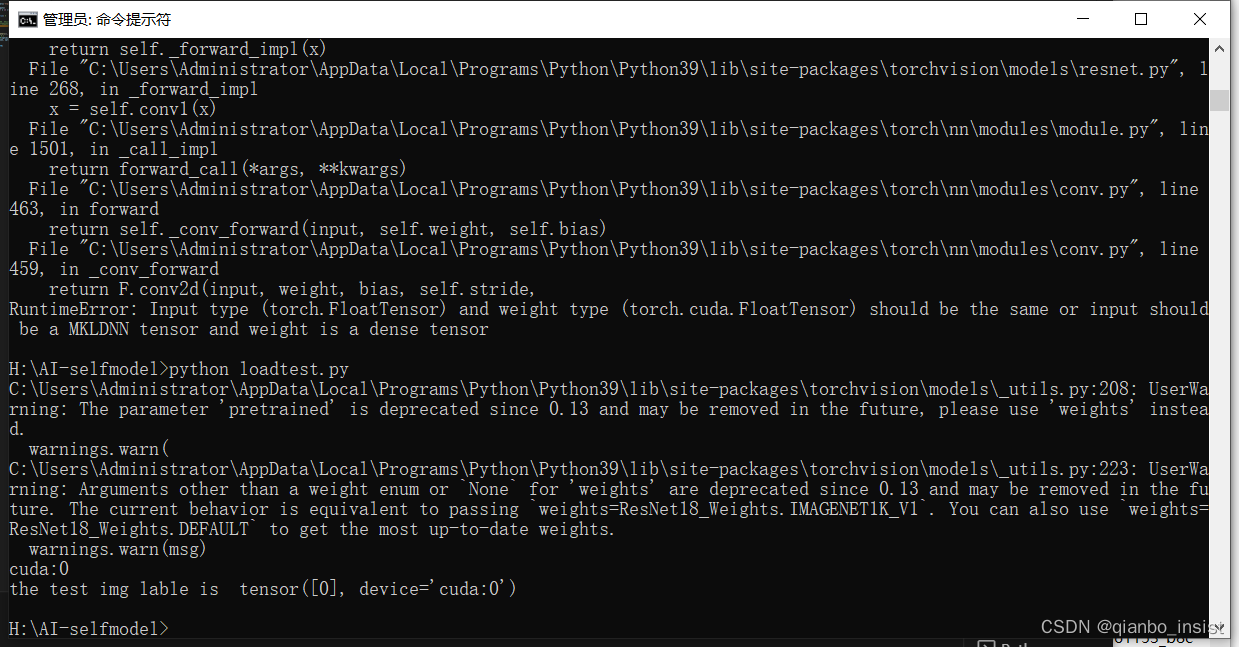
print("the test img lable is ",predicted)
里面unsqueeze函数是必须的,注意这一点,加载图像时,图像通常有3个维度,宽度、高度、和颜色通道数。对于黑白图像,颜色通道数为1,对于彩色图像,有3个颜色通道(红色、绿色和蓝色,RGB)。因此,加载图像并将其存储为张量,维度的顺序是[通道, 高度,宽度],对于二维卷积神经网络来说,三维数据量不能对应。在深度卷积网络中,数据是成批处理的。卷积神经网络不是一次只处理一个图像,而是同时并行处理N个图像。我们称这组图像为批处理。因此,不是维度[C, H, W],而是[N, C, H, W]。,如果一次只处理一个图像,仍然需要将其放入批处理表单中,以便模型接受。如,有一个形状为[3, 255, 255]的图像,则需要将其转换为[1, 3, 255, 255]。这就是unsqueeze(0)函数做的事情。
训练的时候使用的cuda, 在识别的时候可以使用cuda,也可以使用非cuda,也就是"cpu",也是可以的。调用结果如下所示:
python test.py 里面是ant.jpg

放一个工程车进去,里面是

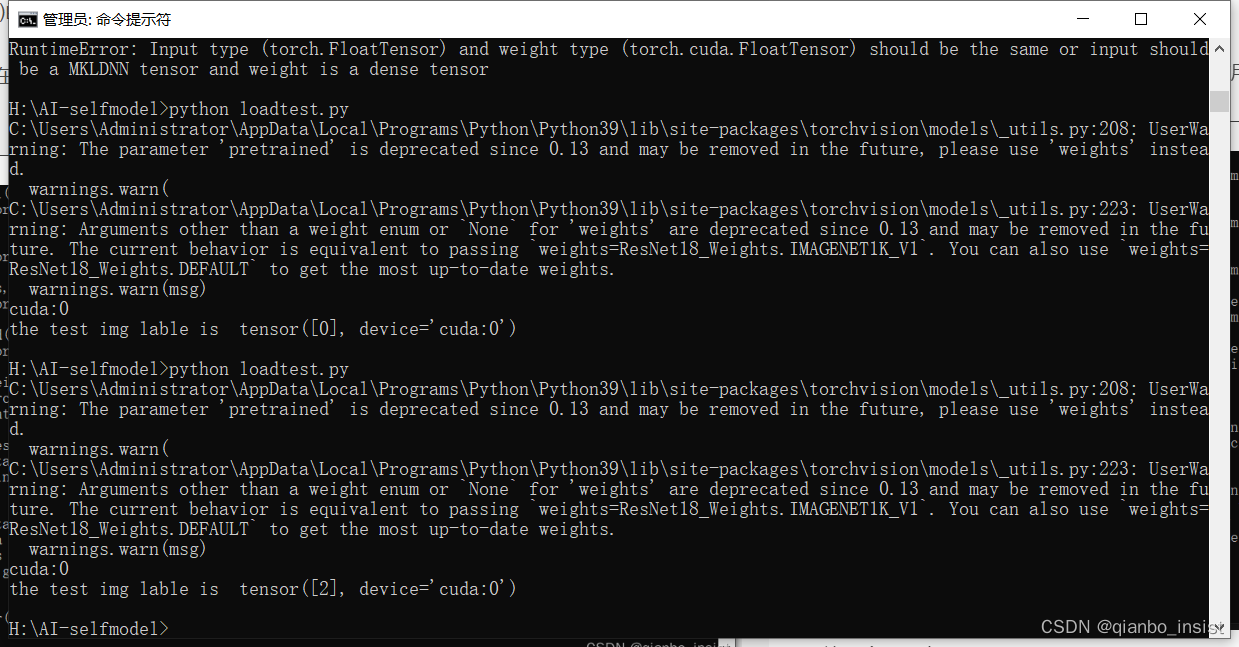
看见了第三类也就是tensor[2] ,出来了,也就是 tensor[0] 是ant, tensor[1] 是bee,tensor[2] 是工程车
我们使用迁移学习完成了训练和识别,但是这里有一个局限,这是单主要物体识别,没有多分类识别和目标检测,下一篇我们将使用多分类和目标检测来检测物体。