https://zhuanlan.zhihu.com/p/520060653
本文基于以下软硬件假定:
架构:AARCH64
软件:Uboot 2021.10-rc1
1 Uboot总体流程
回顾下我们前面介绍的atf,其基本启动流程为:BL1 – BL2 – BL31 – BL32 – BL33(uboot),即在bl32启动完成后再启动uboot,uboot作为启动链中作为最后一级镜像,用于启动最终的os。Atf是arm为了增强系统安全性引入,只支持armv7和armv8架构的可信固件。而uboot是通用的嵌入式系统引导程序,其可以支持包含arm在内的多种处理器架构,如mips、riscv、powerpc以及x86等,且其历史比atf更加久远。因此默认情况下uboot并不需要与atf共同启动,而其自身就被设计为支持完整的多级启动链,该启动链被设计为最多可包含spl、tpl和uboot三个阶段。接下来我们通过一些典型启动流程,来看下这些阶段的一些组合关系吧
1.1 不带atf启动
spl被称为secondary program loader,在启动链中一般由bootrom加载而作为第二级启动镜像(bl2),它主要用于完成一些基础模块和ddr的初始化,以及加载下一级镜像uboot。由于spl需要被加载到sram中执行,对于有些sram size比较小的系统,可能无法放入整个spl镜像,tpl即是为了解决该问题引入的。加入了tpl之后,可将spl的功能进一步划分为两部分,如spl包含ddr初始化相关代码,而tpl包含镜像加载相关驱动,从而减少spl镜像的size。此时启动流程可被设计为如下方式:
bootrom --> spl(init ddr) --> bootrom --> tpl(load and run uboot)–> uboot
其示意图如下:
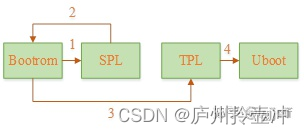
在此流程中,spl主要完成ddr初始化,由于其不带有镜像加载相关的驱动,因此执行完成后需要跳转回bootrom,由bootrom完成tpl的加载(类似atf中bl2加载完成后跳转回bl1),并由tpl完成最终uboot的加载。由于tpl的主体流程与spl几乎相同,且大多数系统并不需要tpl,故接下来我们的讨论将主要围绕spl和uboot这两个阶段
若不需要支持tpl,则uboot的典型启动流程可精简为如下方式(这也是uboot最常见的运行方式):

当然,对于有些启动速度要求较高的场景,还可以进一步简化其启动流程。如可将其设计为下面这种跳过uboot,直接通过spl启动操作系统的方式,此时其启动流程如下:

1.2 Atf与uboot组合方式启动
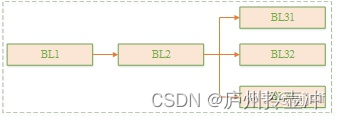
若系统需要支持secure和non secure两种执行状态,则必须要从secure空间开始启动,且启动完成后需要通过secure monitor(bl31)完成normal os对secure空间服务相关请求的处理。 这时atf将非常方便地帮助我们达成这一目的,这也是第一篇中我们已经介绍过的启动方式,以下我们重新贴一下其加载和启动流程图:
(1)atf启动uboot的典型镜像加载流程
(2)atf启动uboot的典型镜像跳转流程
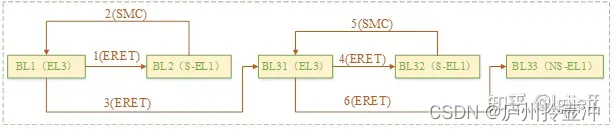
在以上流程中bl32是可选的,若不支持trust os则可裁剪掉该流程。典型情况下bl33为uboot,而bl2既可以使用atf实现,也可以用spl代替
2 uboot初始化
除了一些通过编译选项区分的部分,以及board_init_f和board_init_r函数的具体实现以外,uboot与spl的初始化流程完全相同。spl初始化流程在另一篇文章<spl启动分析>中已经做了较详细的介绍:聊聊SOC启动(七) SPL启动分析
故文本将主要介绍uboot特有部分的内容,其它代码只做简要分析。按照惯例,我们还是先给出uboot的初始化流程图:
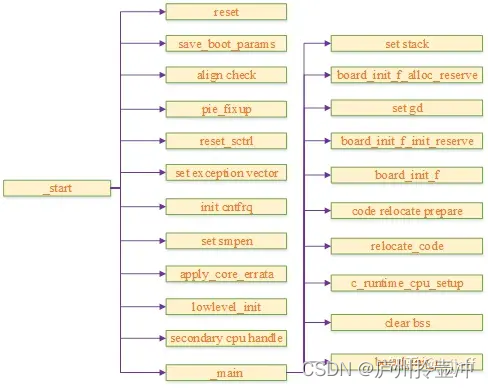
该流程主要包含了以下部分:
(1)save_boot_params保存上一级镜像传入的参数,该函数由平台自行定义
(2)若支持pie则检查代码段是否为4k对齐(因为由于指令集中操作数长度的限制,adr等类型指令的寻址范围是需要4k对齐的)
(3)pie_fixup为pie重定位全局地址相关的.rela.dyn段内容
(4)reset_sctrl根据配置确定是否重设sctlr寄存器
(5)为uboot设置异常向量表。spl和uboot异常向量表设置有以下不同:
- spl在设置了配置选项CONFIG_ARMV8_SPL_EXCEPTION_VECTORS,则会为其设置异常向量表,否则不为其设置异常向量表
- uboot默认情况就会设置异常向量表
armv8的异常向量表格式如下:
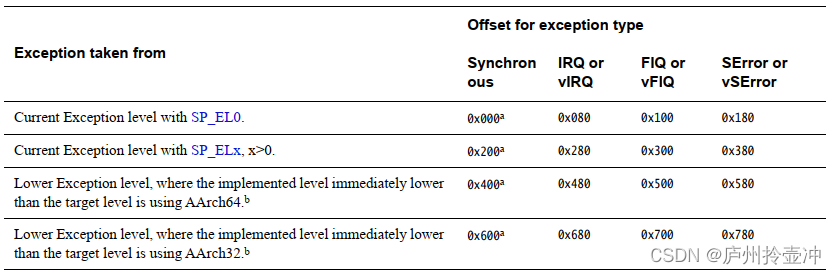
即根据中断触发时cpu正在运行的异常等级、使用的栈寄存器类型以及运行状态,armv8会跳转到不同的中断向量。由于spl和uboot在启动流程中不会执行比当前更低异常等级的代码,因此只需要实现当前异常等级下的8个异常向量即可。其对应的向量表定义在arch/arm/cpu/armv8/exceptions.S中。
由于根据不同的配置,spl或uboot可运行在el1 – el3异常等级下,因此需要根据当前实际的异常等级来选择异常向量表基地址寄存器
(6)若配置了COUNTER_FREQUENCY选项,则根据当前正在运行的异常等级,确定是否要设置cpu的system counter的频率。由于system counter的频率是所有异常等级共享的,为了确保该频率不被随意修改,因此约定只有运行于最高异常等级时才允许修改该寄存器
(7)若设置了配置选项CONFIG_ARMV8_SET_SMPEN,则设置S3_1_c15_c2_1以使能cpu之间的数据一致性
(8)apply_core_errata用于处理cpu的errata
(9)lowlevel_init流程可参考spl启动分析
(10)secondary cpu处理流程将在2.1节中介绍
(11)_main的定义位于arch/arm/lib/crt0_64.S,其流程见2.2节
2.1 从cpu处理流程
smp系统只有主cpu执行完整的启动流程,其它从cpu在启动初期需要被设置到一个特定的状态。,待主cpu将系统启动完成后,再唤醒从cpu从给定地址处执行。armv8的从cpu启动包含psci和spintable两种方式,其中psci方式需要由bl31处理,我们将在后面再专门介绍。此处我们看下uboot对spintable方式是如何处理的,以下是其源码:
#if defined(CONFIG_ARMV8_SPIN_TABLE) && !defined(CONFIG_SPL_BUILD) (1)
branch_if_master x0, x1, master_cpu (2)
b spin_table_secondary_jump (3)
#elif defined(CONFIG_ARMV8_MULTIENTRY) (4)
branch_if_master x0, x1, master_cpu (5)
slave_cpu:
wfe (6)
ldr x1, =CPU_RELEASE_ADDR (7)
ldr x0, [x1]
cbz x0, slave_cpu (8)
br x0 (9)
#endif
master_cpu:
bl _main
(1)若当前从cpu为spin table启动方式,且当前执行的是uboot时。则从cpu将通过wfe进入自旋状态,并等待内核向给定地址填入其启动入口函数,该流程如下:
ENTRY(spin_table_secondary_jump)
.globl spin_table_reserve_begin
spin_table_reserve_begin:
0: wfe (1)
ldr x0, spin_table_cpu_release_addr (2)
cbz x0, 0b (3)
br x0 (4)
.globl spin_table_cpu_release_addr
.align 3
spin_table_cpu_release_addr: (5)
.quad 0
.globl spin_table_reserve_end
spin_table_reserve_end:
ENDPROC(spin_table_secondary_jump)
- 从cpu进入wfe睡眠模式
- 若该cpu被唤醒,则读取spin_table_cpu_release_addr的值
- 若内核未向该地址写入其启动的入口函数,则继续返回睡眠
- 否则,跳转到读取到的入口处开始从cpu的启动流程
- 定义保存从cpu入口函数的内存地址,该地址在uboot启动时会被填入设备树spintable节点的属性中。内核启动从cpu时,则通过向解析到地址写入入口函数,并唤醒secondary cpu,从而完成其启动
(2)若当前cpu为主cpu,继续执行冷启动流程
(3)若当前cpu为从cpu,则进入step 1的spin模式
(4)若未配置spintable,则从cpu需要spin在一个系统预先定义的地址上,并等待uboot在合适的时机向该地址填入入口函数
(5)若当前cpu为主cpu,则继续执行冷启动流程
(6 - 9)该流程与spintable方式类似,也是cpu通过wfe进入睡眠模式,并在唤醒后查询给定地址的值是否已被填入。若被填入则跳转到入口函数开始执行,否则继续进入睡眠模式。
2.2 _main流程分析
2.2.1 uboot重定位前的GD及内存规划
在进入c语言之前,我们需要为其准备好运行环境,以及做好内存规划,这其中除了栈和堆内存之外,还需要为gd结构体分配内存空间。gd是uboot中的一个global_data类型全局变量,该变量包含了很多全局相关的参数,为各模块之间参数的传递和共享提供了方便。由于该变量在跳转到c流程之前就需要准备好,此时堆管理器尚未被初始化,所以其内存需要通过手工管理方式分配。以下为uboot内存规划相关代码:
#if defined(CONFIG_TPL_BUILD) && defined(CONFIG_TPL_NEEDS_SEPARATE_STACK)
ldr x0, =(CONFIG_TPL_STACK)
#elif defined(CONFIG_SPL_BUILD) && defined(CONFIG_SPL_STACK)
ldr x0, =(CONFIG_SPL_STACK)
#elif defined(CONFIG_INIT_SP_RELATIVE)
#if CONFIG_POSITION_INDEPENDENT
adrp x0, __bss_start
add x0, x0, #:lo12:__bss_start
#else
adr x0, __bss_start
#endif
add x0, x0, #CONFIG_SYS_INIT_SP_BSS_OFFSET
#else
ldr x0, =(CONFIG_SYS_INIT_SP_ADDR) (1)
#endif
bic sp, x0, #0xf (2)
mov x0, sp
bl board_init_f_alloc_reserve (3)
mov sp, x0 (4)
mov x18, x0 (5)
bl board_init_f_init_reserve (6)
(1)以上部分根据不同的配置情况获取uboot的初始栈地址
(2)为了遵循ABI规范,栈地址需要16字节对齐,该指令将地址做对齐以后设置到栈指针寄存器中,以为系统设置运行栈
(3)该函数为gd和early malloc分配内存,其代码如下:
ulong board_init_f_alloc_reserve(ulong top)
{
#if CONFIG_VAL(SYS_MALLOC_F_LEN)
top -= CONFIG_VAL(SYS_MALLOC_F_LEN); (a)
#endif
top = rounddown(top-sizeof(struct global_data), 16); (b)
return top;
}
a 为早期堆管理器预留内存
b 为gd预留内存
(4)将预留后的内存地址设置为新的栈地址,此时各部分的地址如下:

(5)将gd地址保存到x18寄存器中,其可用被于后续gd指针的获取
(6)该流程主要用于初始化gd,和设置early malloc的堆管理器基地址,其代码如下:
void board_init_f_init_reserve(ulong base)
{
struct global_data *gd_ptr;
gd_ptr = (struct global_data *)base;
memset(gd_ptr, '\0', sizeof(*gd)); (a)
#if !defined(CONFIG_ARM)
arch_setup_gd(gd_ptr); (b)
#endif
if (CONFIG_IS_ENABLED(SYS_REPORT_STACK_F_USAGE))
board_init_f_init_stack_protection_addr(base); (c)
base += roundup(sizeof(struct global_data), 16);
#if CONFIG_VAL(SYS_MALLOC_F_LEN)
gd->malloc_base = base; (d)
#endif
if (CONFIG_IS_ENABLED(SYS_REPORT_STACK_F_USAGE))
board_init_f_init_stack_protection(); (e)
}
a 获取gd指针,并清空gd结构体内存
b 该函数用于非arm架构的gd指针获取,armv8架构则通过前面设置的x18寄存器获取gd指针,其定义如下(arch/arm/include/asm/global_data.h):
#ifdef CONFIG_ARM64
#define DECLARE_GLOBAL_DATA_PTR register volatile gd_t *gd asm ("x18")
#else
#define DECLARE_GLOBAL_DATA_PTR register volatile gd_t *gd asm ("r9")
#endif
c 该函数用于获取该栈溢出检测的地址
d 设置early malloc的基地址
e 初始化栈溢出检测的canary值,该值被设置为SYS_STACK_F_CHECK_BYTE
2.2.2 uboot重定位
一般的启动流程会由spl初始化ddr,然后将uboot加载到ddr中运行。但这并不是必须的,uboot自身其实也可以作为bl1或bl2启动镜像,此时uboot最初的启动位置不是位于ddr中(如norflash)。由于norflash的执行速度比ddr要慢的多,因此在完成ddr初始化后就需要将其搬移到ddr中,并切换到新的位置继续执行,这个流程就叫做uboot的重定位
2.2.2.1 重定位的前提
uboot重定位依赖于位置无关代码技术,因此需要在编译和重定位时添加以下支持:
(1)编译时添加-fpie选项
(2)在链接时添加-pie选项,它使得链接器会产生.rel.dyn和.dynsym段的fixup表。
(3)链接脚本中添加.rel.dyn和.dynsym段定义,并为重定位代码访问这些段的数据提供符号信息
(4)在重定位过程中需要根据新的地址fixup .rel.dyn和.dynsym段的数据
2.2.2.2 重定位基本流程
由于内核需要从内存的低地址开始运行,为了防止内核三件套(kernel、dtb和ramdisk)的加载地址与uboot运行地址重叠,因此uboot的重定位地址需要被设置到内存顶端附近。同时我们还需要为一些特定模块预留一些内存空间(比如页表空间、framebuffer等),下图就是uboot规划的重定位后内存布局:
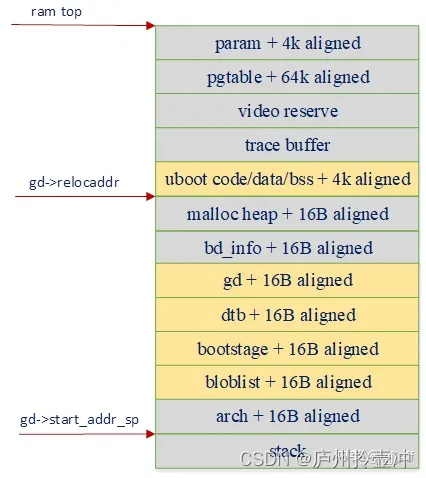
该图中橙色部分都是需要执行重定位操作的,如uboot的代码段、数据段,以及gd、设备树等,它们都是在board_init_r阶段还需要使用的。对于gd和dtb等纯数据的重定位,只需要将数据拷贝到新的地址,并将其基地址指针切换到新地址即可。但对于代码段的重定位我们还需要考虑以下问题:
(1)位置无关代码需要调整.rel.dyn和.dynsym段
(2)栈指针需要切换到新的位置
(3)重定位完成后如何完成pc的平滑切换
以下是armv8代码重定位准备相关的源码,其位于arch/arm/lib/crt0_64.S中:
#if !defined(CONFIG_SPL_BUILD)
ldr x0, [x18, #GD_START_ADDR_SP] (1)
bic sp, x0, #0xf (2)
ldr x18, [x18, #GD_NEW_GD] (3)
adr lr, relocation_return (4)
#if CONFIG_POSITION_INDEPENDENT
adrp x0, _start
add x0, x0, #:lo12:_start
ldr x9, _TEXT_BASE
sub x9, x9, x0
add lr, lr, x9 (5)
#if defined(CONFIG_SYS_RELOC_GD_ENV_ADDR)
ldr x0, [x18, #GD_ENV_ADDR]
add x0, x0, x9
str x0, [x18, #GD_ENV_ADDR] (6)
#endif
#endif
ldr x9, [x18, #GD_RELOC_OFF]
add lr, lr, x9 (7)
ldr x0, [x18, #GD_RELOCADDR]
b relocate_code (8)
relocation_return:
(1)获取新的栈指针地址
(2)设置新的栈
(3)将新的gd地址设置到x18,以将gd切换到新的位置
(4)将重定位返回位置加载到lr中,在重定位流程中,这个地址将会被调整到新代码段的对应位置处。并在重定位完成后跳转到该地址处执行,从而完成代码从老位置到新位置的切换
(5)若定义了位置无关选项CONFIG_POSITION_INDEPENDENT,则计算其偏移值,并用该偏移值调整lr的值
(6)若定义了环境变量重定位选项CONFIG_SYS_RELOC_GD_ENV_ADDR,则将环境变量的地址调整到新的位置
(7)根据重定位偏移调整lr的位置
(8)进入实际的代码重定位流程
armv8的代码重定位流程位于arch/arm/lib/relocate_64.S中,其代码如下:
ENTRY(relocate_code)
stp x29, x30, [sp, #-32]!
mov x29, sp
str x0, [sp, #16] (1)
adrp x1, __image_copy_start
add x1, x1, :lo12:__image_copy_start
subs x9, x0, x1
b.eq relocate_done (2)
ldr x1, _TEXT_BASE
subs x9, x0, x1 (3)
adrp x1, __image_copy_start
add x1, x1, :lo12:__image_copy_start
adrp x2, __image_copy_end
add x2, x2, :lo12:__image_copy_end (4)
copy_loop: (5)
ldp x10, x11, [x1], #16
stp x10, x11, [x0], #16
cmp x1, x2
b.lo copy_loop
str x0, [sp, #24] (6)
adrp x2, __rel_dyn_start (7)
add x2, x2, :lo12:__rel_dyn_start
adrp x3, __rel_dyn_end
add x3, x3, :lo12:__rel_dyn_end
fixloop:
ldp x0, x1, [x2], #16
ldr x4, [x2], #8
and x1, x1, #0xffffffff
cmp x1, #R_AARCH64_RELATIVE
bne fixnext
add x0, x0, x9
add x4, x4, x9
str x4, [x0]
fixnext:
cmp x2, x3
b.lo fixloop
relocate_done:
switch_el x1, 3f, 2f, 1f (8)
bl hang
3: mrs x0, sctlr_el3
b 0f
2: mrs x0, sctlr_el2
b 0f
1: mrs x0, sctlr_el1
0: tbz w0, #2, 5f (9)
tbz w0, #12, 4f (10)
ic iallu
isb sy
4: ldp x0, x1, [sp, #16]
bl __asm_flush_dcache_range
bl __asm_flush_l3_dcache
5: ldp x29, x30, [sp],#32 (11)
Ret (12)
ENDPROC(relocate_code)
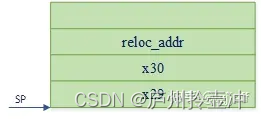
(1)构造一个栈帧,该栈帧中包含lr寄存器x30,fp寄存器x29和函数入参x0,其中x0为重定位的起始目的地址,该流程之后栈帧的内容如下:
(2)计算镜像运行地址与目的地址的偏移,若它们相等,则显然无须执行重定位,可直接跳过该流程
(3)计算镜像链接地址与目的地址的偏移
(4)读取镜像运行地址的起始地址和结束地址
(5)从运行地址处将镜像拷贝到重定位目的地址处
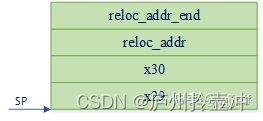
(6)将重定位结束地址入栈,入栈后栈帧的内容如下:
(7)位置无关代码相关处理
(8)根据当前执行的异常等级,跳转到对应的位置以读取sctlr寄存器的内容
(9 - 10)由于重定位后pc将会跳转到新的位置执行,因此若使能了cache,显然重定位之前已加载到cache中的指令还是老的地址,此时若直接跳转则cache中的内容是错误的。因此必须要失效掉cache中已经加载的内容
(11)从栈帧中恢复x29和x30(lr)的内容。现在已经万事俱备,只欠东风了,我们只要通过ret命令跳转到新地址执行即可
(12)经过慢慢长途,让我们在新的位置愉快地继续奔跑吧
2.2.2.3 重定位对调试的影响
我们知道调试器默认情况下会通过链接地址查找符号表,但在代码重定位后其运行地址就与链接地址不一致了,此时若不做调整则调试器将无法使用符号表。下面我们以qemu下调试uboot为例,介绍如何解决该问题。
(1)qemu启动uboot
qemu-system-aarch64 \
-M virt \
-cpu cortex-a53 \
-smp 2 \
-m 2048M \
-kernel ~/work/u-boot/u-boot \
-nographic -s -S
(2)启动gdb调试器
aarch64-linux-gnu-gdb ~/work/u-boot/u-boot
(3)远程连接上uboot
target remote :1234
(4)丢弃老的符号表
symbol-file
(5)将符号表添加到重定位后的位置处,假设其地址为0xbff8a000,则命令如下:
add-symbol-file u-boot 0xbff8a000
(6)此后可以按正常方式继续调试,如设置断点,读取符号的值等
(7)若不知道uboot的重定位地址,则可以在reloc地址计算完成之后的位置设置断点,并在该断点处读取relocaddr。其方式如下:
a 设置断点
b setup_reloc
b 继续运行直到断点被触发,然后从gd中读取relocaddr的值
(gdb) p /x gd->relocaddr
$2 = 0xbff8a000
c 按前面步骤丢弃老的符号表并将符号表加载到新地址0xbff8a000处
d 设置重定位后的断点,并继续执行