一、基础知识
(1)CPU算力(DMIPS)
(2)GPU算力(FLOPS)
(3)NPU算力(TOPS)
(4)异构多核架构:CPU、GPU、NPU等多种异构
CPU用于通用逻辑运算,比如说系统调度、外部资源访问等;
GPU浮点运算能力强,用于进行图像的3D渲染、图像拼接以及运行大型的3D 游戏等应用。
NPU作为神经网络算法的加速器,负责处理AI方面的计算需求。
二、座舱域控制器
(1)座舱域控制器硬件架构方案:SoC + MCU

A.主控SoC芯片(异构多核架构)
用于跑复杂的操作系统,做大数据的处理,比如图像、视频、音频等非结构化数据的处理。
SoC运行Hypervisor,在Hypervisor之上运行两类操作系统
1)对实时性和安全性要求比较高的安全域模块跑在QNX或者Linux系统上;
2)对实时性要求不太高、但对生态要求比较高的娱乐域模块跑在Android系统上
B.MCU
访问车身网络(SoC芯片架构本身不带车载网络访问的接口,比如CAN、MOST、LIN等)。
MCU运行AUTOSAR系统,用于CAN/LIN总线的唤醒、通讯以及电源管理等。
1)MCU的实时性和可靠性要求非常高,启动唤醒都是毫秒级别,支持CAN、LIN各类车载通讯总线;
2)座舱域控制器与车身、动力等控制器的信息交互需要通过MCU来完成;
3)MCU对SoC进行电源管理和状态监控。
三、座舱主控SoC芯片与智驾主控SoC芯片的区别
1)异构架构的侧重点不同
A.座舱域控器主控SoC芯片的侧重点是CPU和GPU(通用核强于专用核)
B.智驾域控器主控SoC芯片的侧重点是CPU和NPU(专用核强于通用核)
2)接口定义的区别
A.座舱面向的应用场景侧重于舱内的人机交互能力(音视频等大数据的输入输出)
数据输出:比如,视频、声音,还有其它投影图像等数据输出
数据输入,主要是车内人员的数据输入—— 有视频(DMS/OMS)、也有声音(麦克风)等
DP或DSI 接口—— 决定了能接多少路显示屏;
TDM - 决定了是否可以实现更复杂的多场景音频通路;
支持GNSS、WIFI、Bluetooth等模块接口。
B.智驾域控器
毫米波雷达信号一般通过CAN总线传输,激光雷达信号一般通过以太网传输。
3)功能安全设计的差别(设计一些冗余或者增加一些状态检测)
座舱系统对功能安全设计的要求要低,即便是对安全性和实时性要求比较高的仪表或者HUD模块,主控SoC芯片功能安全等级达到ASIL B即可满足要求。
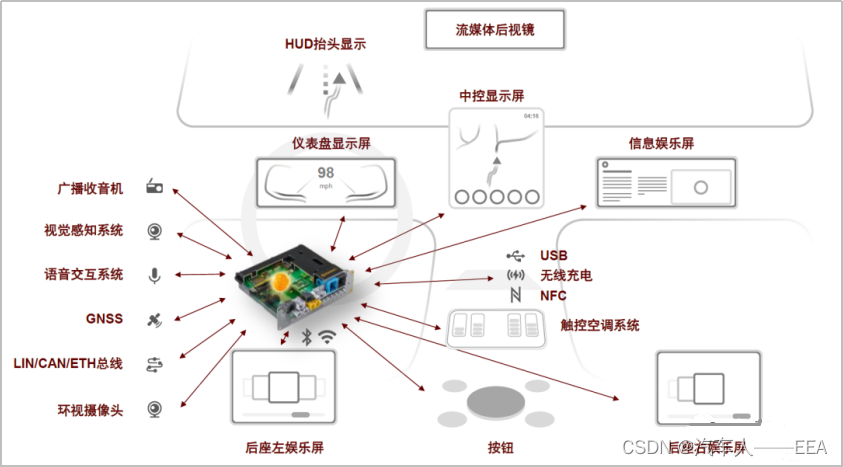
四、智能座舱
智能座舱的特点:
智能化:App远程控制、智能形象+语音欢迎语等;
科技性:高精地图、智能导航、疲劳监测、驾驶坐姿调整等;
易用性:多屏互联(中控屏、仪表盘)等;
人性化:自动泊车、寻找充电桩、自动充电等;
第三空间:沉浸式座舱、智能游戏等。
智能座舱多模态交互:模态包括视觉、听觉、触觉、嗅觉。
视觉:HUD+仪表盘+中控+后视镜+氛围灯

听觉:音乐+语音交互+警示音
触觉:方向盘+按键+中控+挡位+座椅+安全带更多用于提示场景
手势:隔空控制音量、切换歌曲、控制车窗等场景
嗅觉:不同气味用于不同场景,疲劳场景可提神