提起旋转中心标定,那就不得提为什么要标定旋转中心?
我们将红点A移动A’,并且把底边对齐
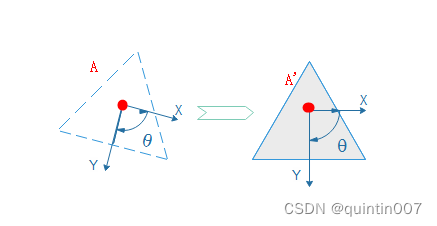
没有做过的人,会说这还不简单,x-x,y-y,u-u,不就是偏移值了么?

有这样想法的,忽视了一个重要的条件,那就是他平移过去后,默认是绕着A’的点旋转的
但
注意了,这一点很重要,那就是实际中的旋转,基本上不会是绕着产品的中心去旋转的!!!

机器人吸的位置,与产品的中心偏差是不确定的.
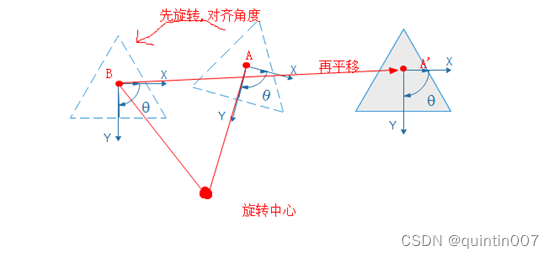
正确的做法如图所示
1,A点先绕着旋转中心点旋转到B点,对齐角度
2,从B点平移到A’点
3,那么偏移量 就是 B.x-A’.x B.y-A’.y 角度差 是两个位置的角度值
这一点,理解起来有困难的,要反复思考下,因为凡是涉及到旋转的定位项目,旋转中心都是绕不过的一道坎。
旋转中心很重要,那他是如何标定出来的?
机器人吸住mark点,然后旋转mark点进行标定。